一种自动焊齿机双头气爪结构的制作方法
本技术涉及为自动运送合金刀头的一个装夹与工位转接的装置,使用于加工圆合金锯片全自动焊接机,尤其涉及一种自动焊齿机双头气爪结构。
背景技术:
1、现有同类设备在运输合金时,时常会发生粘胶情况。首先,目前使用的是单头夹爪,同一副爪头要夹着合金从皮带机上取走,在检测位置由光纤反射来测试合金的正反,再运送到点胶位置,由点胶阀往合金上表面加注助焊胶,再运送到焊接工位做交接。整个过程中单头夹爪都不松开合金,由于合金比点胶针管只宽2mm左右,胶容易在点胶时沾在夹爪上,在下一次取合金时会沾在运送合金的皮带机上。如此一来,皮带机会沾胶,造成合金运送不畅,形成运送故障。其次,在加热焊接时胶会产生烟雾,对现有的光纤检测镜头会造成腐蚀,影响镜头寿命。因此,研发一种自动焊齿机双头气爪结构,成为本领域技术人员亟待解决的问题。
技术实现思路
1、本实用新型是为了解决上述不足,提供了一种自动焊齿机双头气爪结构。
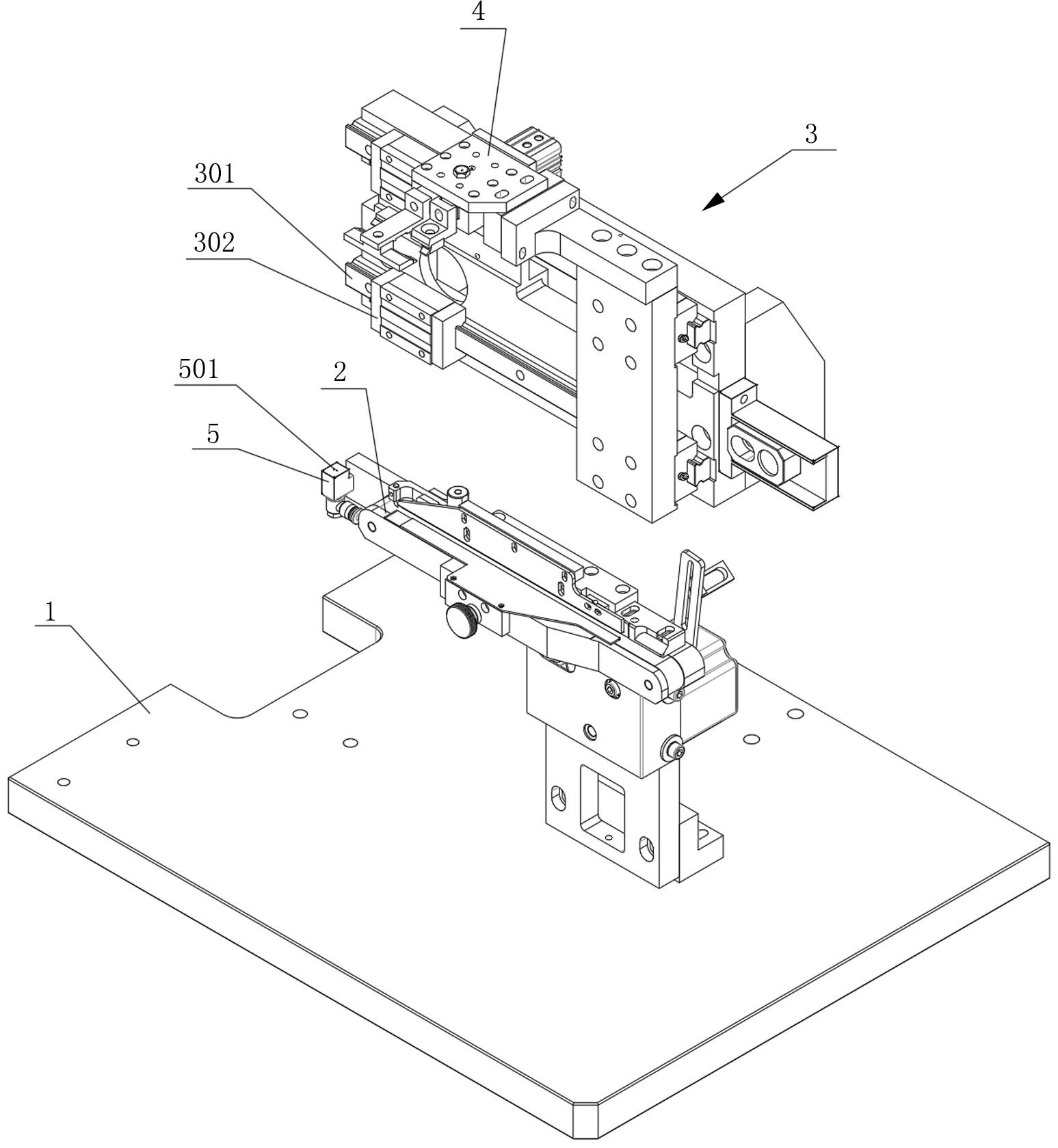
2、本实用新型的上述目的通过以下的技术方案来实现:一种自动焊齿机双头气爪结构,包括基板,基板上设有皮带机和气爪移动机构,所述皮带机一侧设有一合金平台,所述气爪移动机构连接一双头气爪机构。
3、进一步地,所述双头气爪机构包括固定板、气缸、夹臂滑槽、左夹臂和右夹臂,所述气缸固定在固定板一侧,固定板另一侧固定夹臂滑槽,夹臂滑槽中部设有一圆轴,圆轴处安装一摆动件,摆动件两端设为圆头驱动端,所述圆轴两侧分别安装有左夹臂和右夹臂,左夹臂和右夹臂内侧设有驱动端卡口,并设有供摆动件摆动的避让缺口,所述左夹臂后端与气缸伸缩杆连接;所述左夹臂前端连接有后夹板,右夹臂前端连接有前夹板,所述后夹板和前夹板均设有两只夹爪,并组成一左一右两对夹爪。
4、进一步地,所述气爪移动机构包括平移滑轨,平移滑轨上安装有平移滑块,所述双头气爪机构固定在平移滑块上。
5、进一步地,所述合金平台上设有负压孔。
6、进一步地,所述负压孔通过进出气管道分两路连接吸气管路和吹气管路,吸气管路上设有吸气电磁阀和吸气单向阀,吹气管路上设有吹气电磁阀和吹气单向阀,单向阀用于单向阀防止气流回流。
7、进一步地,所述进出气管道设有检测支管,并连接有负压检测信号器。
8、本实用新型与现有技术相比的优点是:传统结构上气爪为单头,要取合金、送料、接胶,这个过程中会粘胶,当传送至皮带机时,胶会沾染到皮带上,导致出合金不流畅,频繁清理和调试。而本实用新型的双头气爪结构取合金和点胶时分别由两对不同的夹爪夹取,因此,胶不会沾染到皮带机上。同时,也减少光纤检测镜头更换的成本及时间,延长光纤检测镜头的使用寿命。
技术特征:
1.一种自动焊齿机双头气爪结构,包括基板,其特征在于:所述基板上设有皮带机和气爪移动机构,所述皮带机一侧设有一合金平台,所述气爪移动机构连接一双头气爪机构;所述双头气爪机构包括固定板、气缸、夹臂滑槽、左夹臂和右夹臂,所述气缸固定在固定板一侧,固定板另一侧固定夹臂滑槽,夹臂滑槽中部设有一圆轴,圆轴处安装一摆动件,摆动件两端设为圆头驱动端,所述圆轴两侧分别安装有左夹臂和右夹臂,左夹臂和右夹臂内侧设有驱动端卡口,并设有供摆动件摆动的避让缺口,所述左夹臂后端与气缸伸缩杆连接;所述左夹臂前端连接有后夹板,右夹臂前端连接有前夹板,所述后夹板和前夹板均设有两只夹爪,并组成一左一右两对夹爪。
2.根据权利要求1所述的一种自动焊齿机双头气爪结构,其特征在于:所述气爪移动机构包括平移滑轨,平移滑轨上安装有平移滑块,所述双头气爪机构固定在平移滑块上。
3.根据权利要求1所述的一种自动焊齿机双头气爪结构,其特征在于:所述合金平台上设有负压孔。
4.根据权利要求3所述的一种自动焊齿机双头气爪结构,其特征在于:所述负压孔通过进出气管道分两路连接吸气管路和吹气管路,吸气管路上设有吸气电磁阀和吸气单向阀,吹气管路上设有吹气电磁阀和吹气单向阀,单向阀用于单向阀防止气流回流。
5.根据权利要求4所述的一种自动焊齿机双头气爪结构,其特征在于:所述进出气管道设有检测支管,并连接有负压检测信号器。
技术总结
本技术公开了一种自动焊齿机双头气爪结构,包括基板,所述基板上设有皮带机和气爪移动机构,所述皮带机一侧设有一合金平台,所述气爪移动机构连接一双头气爪机构。本技术与现有技术相比的优点是:传统结构上气爪为单头,要取合金、送料、接胶,这个过程中会粘胶,当传送至皮带机时,胶会沾染到皮带上,导致出合金不流畅,频繁清理和调试。而本技术的双头气爪结构取合金和点胶时分别由两对不同的夹爪夹取,因此,胶不会沾染到皮带机上。同时,也减少光纤检测镜头更换的成本及时间,延长光纤检测镜头的使用寿命。
技术研发人员:陈鹏飞
受保护的技术使用者:潞太(浙江)智能设备有限公司
技术研发日:20230214
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!