一种伸缩式转子动平衡调节装置的制作方法
本技术涉及电机,尤其涉及一种伸缩式转子动平衡调节装置。
背景技术:
1、随着新能源概念的兴起,在汽车、机器人、工程制造等领域引起了一股电机热潮,同时在如今的国家政策鼓励下,电机被大量制造并用于各行各业。
2、转子是电机结构中的机器重要的组成,转子的动平衡对电机的性能和质量有着至关重要的作用。传统的电机转子在进行动平衡调节时,通常依靠转子自由转动后静止,其最下端为重心所在位置,此时通过如图1所示的钻机在转子上端切削去一部分从而使转子达到动平衡。然而现有的钻机在切削时不可避免地在钻孔中残留一部分铁屑,为避免铁屑影响电子转子动平衡的精确性,需要随时退出钻头2,清理钻孔中的铁屑后再次进行动平衡调节,过程非常繁琐,尤其是在进行批量调节时,大大影响生产效率。
技术实现思路
1、为克服现有技术的缺陷或缺陷之一,本实用新型公开一种伸缩式转子动平衡调节装置,所采取的技术方案是:
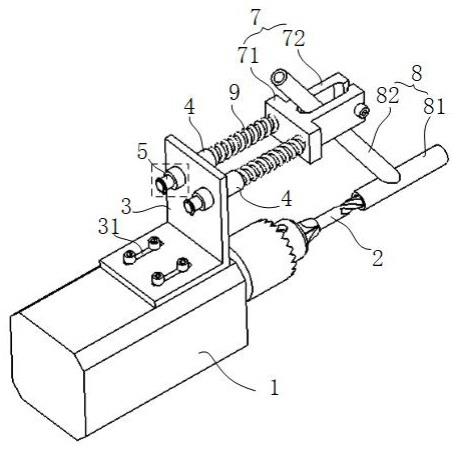
2、一种伸缩式转子动平衡调节装置,包括钻机,钻机的主轴上装夹钻头,与现有技术不同的是,钻机的机体上端固接l型固定板,l型固定板的立板上固设2个滑动轴承,每个滑动轴承内滑动配合滑杆,滑杆靠近钻机机体的一端开设环槽,环槽内卡接限位卡环,2个滑杆的另一端固接夹座,夹座与滑动轴承之间的滑杆上套设弹簧,夹座上夹设三通管,三通管的主管套设在钻头上,三通管的侧管被夹座夹持,侧管上端连接强力吸尘器的抽风管。
3、进一步地,主管的内径大于钻头的外径2-3mm。
4、进一步地,主管的轴线与侧管的轴线在靠近钻机机体一侧的夹角为锐角。
5、进一步地,主管的长度小于钻头的长度。
6、进一步地,l型固定板的平板上开设2个长圆槽,4个螺钉分别穿过2个长圆槽后与钻机的机体螺接。
7、进一步地,夹座包括座体和2个与座体固接的夹臂,三通管的侧管位于2个夹臂之间,1个以上的螺钉穿过其中一个夹臂与另一个夹臂螺接。
8、进一步地,在自由状态下,主管远离钻机机体的一端覆盖住钻头的尖端。
9、与现有技术相比,本实用新型通过对现有钻机的改进,在电机转子需要切削的地方进行正常切削,切削产生的铁屑能随时清除,从而大大提高了转子动平衡调节的效率。
技术特征:
1.一种伸缩式转子动平衡调节装置,包括钻机(1),钻机(1)的主轴上装夹钻头(2),其特征在于,钻机(1)的机体上端固接l型固定板(3),l型固定板(3)的立板上固设2个滑动轴承(4),每个滑动轴承(4)内滑动配合滑杆(5),滑杆(5)靠近钻机机体的一端开设环槽,环槽内卡接限位卡环(6),2个滑杆(5)的另一端固接夹座(7),夹座(7)与滑动轴承(4)之间的滑杆(5)上套设弹簧(9),夹座(7)上夹设三通管(8),三通管(8)的主管(81)套设在钻头(2)上,三通管(8)的侧管(82)被夹座(7)夹持,侧管(82)上端连接强力吸尘器的抽风管。
2.根据权利要求1所述的一种伸缩式转子动平衡调节装置,其特征在于,主管(81)的内径大于钻头(2)的外径2-3mm。
3.根据权利要求1所述的一种伸缩式转子动平衡调节装置,其特征在于,主管(81)的轴线与侧管(82)的轴线在靠近钻机(1)机体一侧的夹角为锐角。
4.根据权利要求1所述的一种伸缩式转子动平衡调节装置,其特征在于,主管(81)的长度小于钻头(2)的长度。
5.根据权利要求1所述的一种伸缩式转子动平衡调节装置,其特征在于,l型固定板(3)的平板上开设2个长圆槽(31),4个螺钉分别穿过2个长圆槽(31)后与钻机(1)的机体螺接。
6.根据权利要求1所述的一种伸缩式转子动平衡调节装置,其特征在于,夹座(7)包括座体(71)和2个与座体(71)固接的夹臂(72),三通管(8)的侧管(82)位于2个夹臂(72)之间,1个以上的螺钉穿过其中一个夹臂(72)与另一个夹臂(72)螺接。
7.根据权利要求1所述的一种伸缩式转子动平衡调节装置,其特征在于,在自由状态下,主管(81)远离钻机(1)机体的一端覆盖住钻头(2)的尖端。
技术总结
本技术涉及电机,尤其涉及一种伸缩式转子动平衡调节装置,包括钻机,钻机的主轴上装夹钻头,与现有技术不同的是,钻机的机体上端固接L型固定板,L型固定板的立板上固设2个滑动轴承,每个滑动轴承内滑动配合滑杆,滑杆靠近钻机机体的一端开设环槽,环槽内卡接限位卡环,2个滑杆的另一端固接夹座,夹座与滑动轴承之间的滑杆上套设弹簧,夹座上夹设三通管,三通管的主管套设在钻头上,三通管的侧管被夹座夹持,侧管上端连接强力吸尘器的抽风管。与现有技术相比,本技术通过对现有钻机的改进,在电机转子需要切削的地方进行正常切削,切削产生的铁屑能随时清除,从而大大提高了转子动平衡调节的效率。
技术研发人员:李杰,任鹏,苑在铎,张强武,路佳宾
受保护的技术使用者:烟台艾创机器人科技有限公司
技术研发日:20230215
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!