焊接装置的制作方法
本技术涉及一种焊接装置。
背景技术:
1、针对管状或柱状结构体进行焊接,目前已经有多种不同的方式,比如文献号为cn217253561u,名称为:一种特种材料机器人圆形点焊设备的专利文献,以及,文献号为cn218016825u,名称为:压路机小内筒焊接加工工作站的专利文献以及文献号为cn214721947u,名称为:一种筒体自动化焊接装置的专利文献所揭示的技术方案,这些方案中,包括两种对筒状结构体的固定方案,其一为在筒状结构体的两端进行装夹,其二为在筒状结构体的下侧设置托置辊,这两种方式均可以通过转动筒状结构体的方式来调整筒状结构体的位置从而方便焊接,但是这两种方式通常仅适用于对筒状结构体的外部进行焊接,对于筒状结构体内部则需要另行安排工位,另外,也存在一些立式装夹的焊接装置以实现对筒状结构体内部进行焊接,如文献号为:cn218487574u,名称为:一种多功能焊接机器人工作站的专利文献示出的方式,但是,这种方式通常适合于较短的筒状结构体的焊接,对于具有较长、较深的筒状结构体的内部或外部焊接则存在一定的难度,因此需要一种焊接装置能够同时解决大直径、较长长度的筒状结构体内部及外部的焊接。
技术实现思路
1、为此,本实用新型提供一种焊接装置以解决上述技术问题。
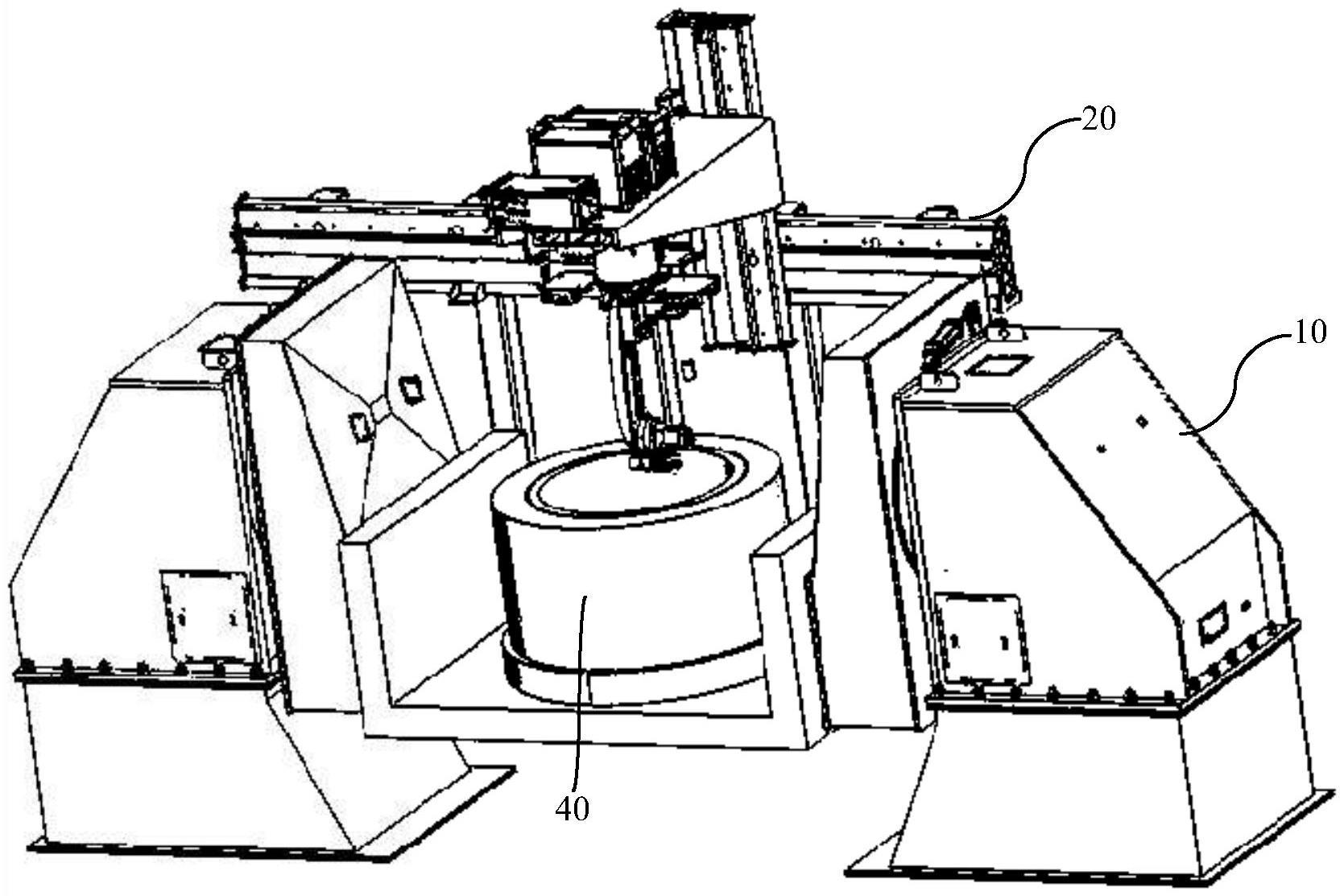
2、一种焊接装置,包括装夹模块及设置在装夹模块一侧的焊接模块,所述的装夹模块包括一对驱动架及安装架,所述的安装架呈u型,包括一对侧板及连接该一对侧板的安装板,所述的侧板通过一具有转动轴线的转台连接在驱动架上,并在驱动架的驱动下沿转动轴线转动,所述的焊接模块包括可沿x轴方向及z轴方向位移的位移组件、机械臂及设置在机械臂末端的焊接组件,其中,所述的x轴方向平行于转动轴线,所述的安装板包括平行于转动轴线的安装面,所述的机械臂的自由度大于等于4个。
3、其中,所述的驱动架还包括一锁止组件,所述的锁止组件包括一由气缸驱动的锁止块。
4、其中,所述的位移组件包括可沿x轴方向位移的x轴位移组件及可沿z轴方向位移的z轴位移组件,其中,所述的x轴位移组件包括x轴导轨及x轴滑座,所述的z轴位移组件包括z轴导轨及z轴滑座。
5、其中,所述的x轴导轨包括横梁及若干支撑横梁的支柱214,所述的横梁呈架空状态。
6、其中,所述的焊接组件包括焊接支座及设置在焊接支座上的焊枪,所述的焊接支座呈一梯台状,包括呈矩形的下安装面,沿下安装面边缘垂直向上延伸的后安装面、左安装面及右安装面,其中,左安装面与右安装面平行设置,一上安装面连接左安装面及右安装面,且上安装面倾斜于下安装面。
7、其中,所述的上安装面与下安装面之间具有一夹角,所述的夹角为25°-35°。
8、其中,在左安装面及右安装面分别设置有感应加热器及视觉系统。
9、其中,所述的后安装面与机械臂之间还设置有防碰撞传感器。
10、其中,所述的焊接支座包括由后安装面、上安装面、下安装面、左安装面及右安装面围设的中空空间,且所述的焊接支座在与后安装面相对的一侧设置有一开口,所述的开口内设置有抽烟装置。
11、其中,所述的基面与转动轴线间隔设置,且所述的基面上还设置有防护圈。
12、有益效果:本实用新型实施例提供一种焊接装置,装夹模块及焊接模块,装夹模块包括驱动架及安装架,安装架呈u型,包括侧板及安装板,侧板通过一具有转动轴线的转台连接在驱动架上,并在驱动架的驱动下沿转动轴线转动,焊接模块包括可沿x轴方向及z轴方向位移的位移组件、机械臂及设置在机械臂末端的焊接组件,其中,所述的x轴方向平行于转动轴线,所述的安装板包括平行于转动轴线的安装面,所述的机械臂的自由度大于等于4个,通过上述设置,使得本实用新型的焊接装置的可焊接范围非常大,由于其装夹方式为端面固定在基面上,同时基面的方向可以通过转台来进行调整,即当需要伸入到待焊接结构件内部进行焊接时,通过调整待焊接结构件的开口方向容易的实现焊枪进入内容焊接,同时,在外部设置的x轴位移组件及z轴位移组件则通过调整机械臂的位置使得外部焊接也非常容易,同时不论是内部还是外部均可以实现各位置或角度的焊接。
技术特征:
1.一种焊接装置,包括装夹模块及设置在装夹模块一侧的焊接模块,其特征在于,所述的装夹模块包括一对驱动架及安装架,所述的安装架呈u型,包括一对侧板及连接该一对侧板的安装板,所述的侧板通过一具有转动轴线的转台连接在驱动架上,并在驱动架的驱动下沿转动轴线转动,所述的焊接模块包括可沿x轴方向及z轴方向位移的位移组件、机械臂及设置在机械臂末端的焊接组件,其中,所述的x轴方向平行于转动轴线,所述的安装板包括平行于转动轴线的安装面,所述的机械臂的自由度大于等于4个。
2.如权利要求1所述的焊接装置,其特征在于,所述的驱动架还包括一锁止组件,所述的锁止组件包括一由气缸驱动的锁止块。
3.如权利要求1所述的焊接装置,其特征在于,所述的位移组件包括可沿x轴方向位移的x轴位移组件及可沿z轴方向位移的z轴位移组件,其中,所述的x轴位移组件包括x轴导轨及x轴滑座,所述的z轴位移组件包括z轴导轨及z轴滑座。
4.如权利要求3所述的焊接装置,其特征在于,所述的x轴导轨包括横梁及若干支撑横梁的支柱,所述的横梁呈架空状态。
5.如权利要求4所述的焊接装置,其特征在于,所述的焊接组件包括焊接支座及设置在焊接支座上的焊枪,所述的焊接支座呈一梯台状,包括呈矩形的下安装面,沿下安装面边缘垂直向上延伸的后安装面、左安装面及右安装面,其中,左安装面与右安装面平行设置,一上安装面连接左安装面及右安装面,且上安装面倾斜于下安装面。
6.如权利要求5所述的焊接装置,其特征在于,所述的上安装面与下安装面之间具有一夹角,所述的夹角为25°-35°。
7.如权利要求6所述的焊接装置,其特征在于,在左安装面及右安装面分别设置有感应加热器及视觉系统。
8.如权利要求6所述的焊接装置,其特征在于,所述的后安装面与机械臂之间还设置有防碰撞传感器。
9.如权利要求6所述的焊接装置,其特征在于,所述的焊接支座包括由后安装面、上安装面、下安装面、左安装面及右安装面围设的中空空间,且所述的焊接支座在与后安装面相对的一侧设置有一开口,所述的开口内设置有抽烟装置。
10.如权利要求9所述的焊接装置,其特征在于,所述的安装板包括一基面,所述的基面与转动轴线间隔设置,且所述的基面上还设置有防护圈。
技术总结
本技术实施例提供一种焊接装置,装夹模块及焊接模块,装夹模块包括驱动架及安装架,安装架呈U型,包括侧板及安装板,侧板通过一具有转动轴线的转台连接在驱动架上,并在驱动架的驱动下沿转动轴线转动,焊接模块包括可沿X轴方向及Z轴方向位移的位移组件、机械臂及设置在机械臂末端的焊接组件,其中,所述的X轴方向平行于转动轴线,所述的安装板包括平行于转动轴线的安装面,所述的机械臂的自由度大于等于4个,通过上述设置,当需要内部进行焊接时,通过调整待焊接结构件的开口方向即容易实现,外部焊接则通过位移组件使得调整范围很大,即能够容易的实现内部和外部焊接且内外部焊接的位置及角度也能够容易的实现。
技术研发人员:陈红,马继宏,岳宇琦
受保护的技术使用者:律扬(上海)自动化工程有限公司
技术研发日:20230223
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!