一种方便检修的三维切割机器人的制作方法
本技术涉及三维切割机器人的,具体为一种方便检修的三维切割机器人。
背景技术:
1、现有公开号cn111889901a公开了三维机器人切割设备,包括三维机械人以及设置在三维机械人上的丝杆滑台、随动防撞装置、激光头和随动控制系统;其中,三维机械人:用于控制激光头摆动任意姿态;丝杆滑台:用于控制激光头上下移动;随动防撞装置:用于相撞时驱动激光头偏移以进行紧急避让;激光头:用于对金属工件进行切割;随动控制系统:用于控制三维机械人、丝杆滑台和随动防撞装置,使激光头与工件的表面始终能够保持在一定的距离以及与工件相撞时驱动激光头避让。本发明不仅能够通过设置的三维机器人控制控制激光头移动切割,而且能够通过设置的随动控制系统控制激光头与工件保持1mm随动高度;且能够通过设置的防碰撞装置保护激光头,以防止激光头碰撞损坏。
2、虽然可以能够通过设置的三维机器人控制控制激光头移动切割,而且能够通过设置的随动控制系统控制激光头与工件保持1mm随动高度;且能够通过设置的防碰撞装置保护激光头,以防止激光头碰撞损坏。
3、但是有些三维切割机器人的机械臂是安装在屋顶或者支撑架上的,从而当机械臂需要进行检修时,工作人员就需要攀爬梯子进行检修,这样影响工作人员操作,从而降低工作人员的工作效率。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种方便检修的三维切割机器人,具备可以再需要检修时将机械臂快速拆卸下来,从而方便用户检修机械臂等优点,解决了有些三维切割机器人的机械臂是安装在屋顶或者支撑架上的,从而当机械臂需要进行检修时,工作人员就需要攀爬梯子进行检修,这样影响工作人员操作,从而降低工作人员的工作效率的问题。
3、(二)技术方案
4、为实现上述可以再需要检修时将机械臂快速拆卸下来,从而方便用户检修机械臂目的,本实用新型提供如下技术方案:包括固定块与机械臂,固定块下侧固定安装有固定板,固定板的右侧固定安装有连接柱,机械臂上侧固定安装有连接块,连接块活动套接在连接柱上,固定块下侧开设有滑槽,滑槽上内壁固定安装有竖杆,滑槽内活动连接有挡板,挡板上侧开设有圆槽,竖杆与圆槽滑动连接,竖杆上活动套接有压力弹簧,压力弹簧的上端与滑槽上内壁固定连接,压力弹簧下端与挡板上侧固定连接。
5、优选的,所述固定块右侧固定安装有方板,方板与挡板右侧贴合。
6、优选的,所述挡板右侧固定安装有固定条。
7、优选的,所述固定块下侧固定安装有两组支撑块,两组支撑块上均固定贯穿有固定杆,两个固定杆上均活动套接有滑轮。
8、优选的,两个所述滑轮上均设置有连接绳,两个连接绳上均固定安装有升降块,两个升降块均与机械臂固定连接。
9、(三)有益效果
10、与现有技术相比,本实用新型提供了一种方便检修的三维切割机器人,具备以下有益效果:
11、1、该方便检修的三维切割机器人,通过向上移动挡板,就可以向右移动机械臂,从而可以带动连接块向右移动,当连接块与连接柱分离后,就可以取下机械臂,从而不需要工作人员攀爬梯子等进行检修,当检修完成后,向上移动挡板,再将连接块套接再连接柱上,然后松开挡板,压力弹簧的回弹就可以带动挡板向下移动与连接块右侧贴合,从而将机械臂进行固定,这样就可以再需要检修时将机械臂快速拆卸下来,从而方便用户检修机械臂。
12、2、该方便检修的三维切割机器人,通过方板可以保护压力弹簧的同时避免压力弹簧刮伤用户,通过固定条了可以方便用户向上移动挡板,通过拆卸机械臂时拉扯两个连接绳,可以避免机械臂突然下落摔伤损坏,同时可以通过两个连接绳方便用户上下移动机械臂进行安装拆卸。
技术特征:
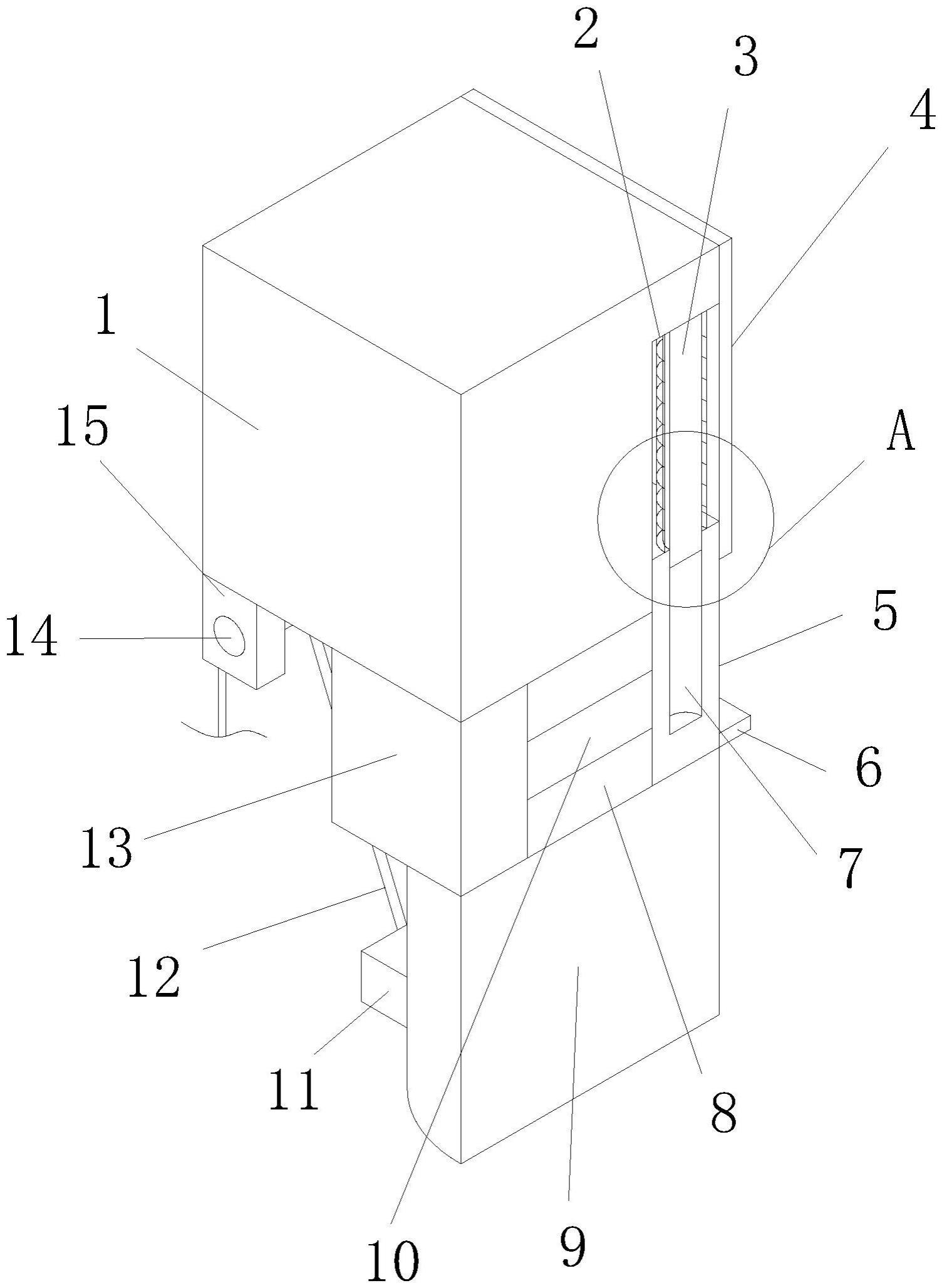
1.一种方便检修的三维切割机器人,包括固定块(1)与机械臂(9),其特征在于:所述固定块(1)下侧固定安装有固定板(13),固定板(13)的右侧固定安装有连接柱(10),机械臂(9)上侧固定安装有连接块(8),连接块(8)活动套接在连接柱(10)上,固定块(1)下侧开设有滑槽(2),滑槽(2)上内壁固定安装有竖杆(3),滑槽(2)内活动连接有挡板(5),挡板(5)上侧开设有圆槽(7),竖杆(3)与圆槽(7)滑动连接,竖杆(3)上活动套接有压力弹簧(17),压力弹簧(17)的上端与滑槽(2)上内壁固定连接,压力弹簧(17)下端与挡板(5)上侧固定连接。
2.根据权利要求1所述的一种方便检修的三维切割机器人,其特征在于:所述固定块(1)右侧固定安装有方板(4),方板(4)与挡板(5)右侧贴合。
3.根据权利要求1所述的一种方便检修的三维切割机器人,其特征在于:所述挡板(5)右侧固定安装有固定条(6)。
4.根据权利要求1所述的一种方便检修的三维切割机器人,其特征在于:所述固定块(1)下侧固定安装有两组支撑块(15),两组支撑块(15)上均固定贯穿有固定杆(14),两个固定杆(14)上均活动套接有滑轮(16)。
5.根据权利要求4所述的一种方便检修的三维切割机器人,其特征在于:两个所述滑轮(16)上均设置有连接绳(12),两个连接绳(12)上均固定安装有升降块(11),两个升降块(11)均与机械臂(9)固定连接。
技术总结
本技术涉及三维切割机器人的技术领域,且公开了一种方便检修的三维切割机器人,包括固定块与机械臂,固定块下侧固定安装有固定板,固定板的右侧固定安装有连接柱,机械臂上侧固定安装有连接块,连接块活动套接在连接柱上,向上移动挡板,就可以向右移动机械臂,从而可以带动连接块向右移动,当连接块与连接柱分离后,就可以取下机械臂,从而不需要工作人员攀爬梯子等进行检修,当检修完成后,向上移动挡板,再将连接块套接再连接柱上,然后松开挡板,压力弹簧的回弹就可以带动挡板向下移动与连接块右侧贴合,从而将机械臂进行固定,这样就可以再需要检修时将机械臂快速拆卸下来,从而方便用户检修机械臂。
技术研发人员:吴付七,张龙,吴树君
受保护的技术使用者:徐州智能自动化设备有限公司
技术研发日:20230302
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!