一种螺母自动焊接设备的制作方法
本技术涉及自动焊接,特别涉及一种螺母自动焊接设备。
背景技术:
1、螺母是现代机械业常见的一种组装零件,部分螺母在加工的过程中需要使其与工件进行焊接,此前的螺母焊接采用大量人工焊接方式,其包括人工搬运、人工焊接和人工检测,操作时要求有空场地,劳动强度大且多人操作,一个焊接工位至少需要三个工人同时工作,而且焊接过程中容易造成人员伤害和螺母焊接不良和焊接错误、漏焊的质量隐患,人工作业的效率较低,安全隐患大,容易出错且成本高。
技术实现思路
1、本实用新型的目的在于提供一种螺母自动焊接设备,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
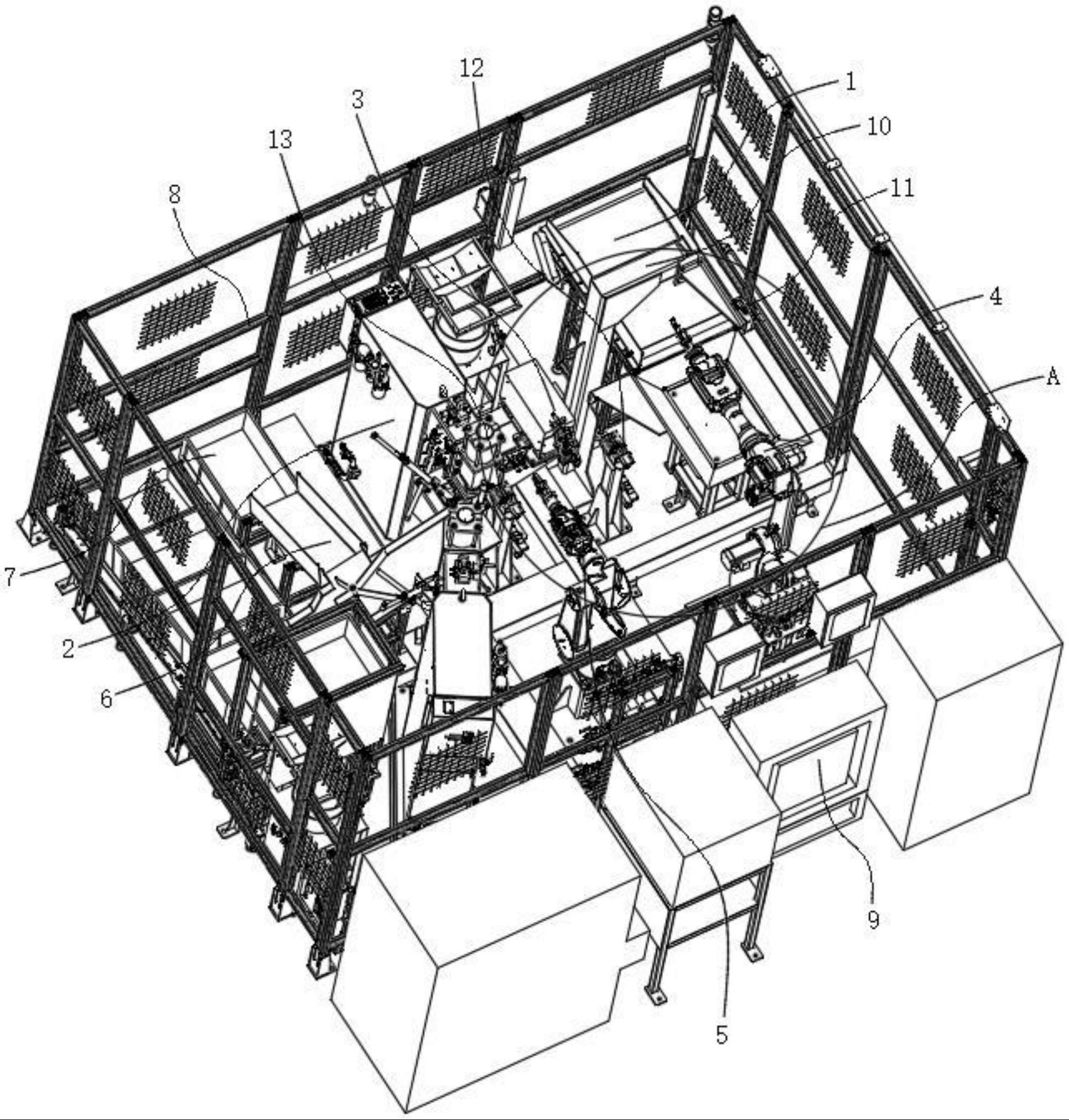
3、一种螺母自动焊接设备,包括输送机构和焊接机构,其中输送机构和焊接机构之间设有旋转机构;所述输送机构前方设有第一机器人,其中第一机器人可延伸至输送机构上方;所述旋转机构前方设有第二机器人,其中第二机器人和第一机器人结构相同且位于同一侧;所述焊接机构下方设有下料滑道,其中下料滑道末端与收集箱连通。
4、优选地,所述输送机构和焊接机构四周设有防护栏,其中防护栏外侧设有控制箱;所述控制箱内置有plc控制器,其中plc控制器分别与第一机器人和第二机器人电性连接。
5、优选地,所述输送机构包括传输带和柔性振动盘,其中柔性振动盘设置在传输带下方。
6、优选地,所述柔性振动盘上方设有3d工业相机,其中3d工业相机与plc控制器电性连接。
7、优选地,所述输送机构与旋转机构之间设有第一检测相机,其中旋转机构与焊接机构之间设有第二检测相机;所述第一检测相机和第二检测相机分别与plc控制器电性连接。
8、优选地,所述第一机器人包括旋转底座、转臂和支撑臂,其中转臂下端与旋转底座连接;所述支撑臂一端与转臂上端连接,其中支撑臂另一端设有抓手。
9、优选地,所述旋转机构包括固定座和与固定座转动连接的转轴,其中转轴前端设有夹紧件。
10、优选地,所述焊接机构包括本体和焊枪,其中焊枪通过伸缩臂与本体连接。
11、与现有技术相比,本实用新型的有益效果:本实用新型通过plc控制器控制第一机器人抓取输送机构上的产品,并将产品放置在旋转机构上,根据焊接需求控制旋转机构带动产品进行旋转;然后通过plc控制器控制第二机器人抓取旋转机构上的产品移动至焊接机构设定的焊接位置,通过焊接机构上的焊枪进行螺母自动焊接,通过自动焊接可以解决人为的焊接质量因素,保证焊接质量的一致性,解放生产力,提高螺母焊接的生产效率和准确性,同时可极大地降低生产成本,减少生产者的劳动强度。
技术特征:
1.一种螺母自动焊接设备,包括输送机构(1)和焊接机构(2),其中输送机构(1)和焊接机构(2)之间设有旋转机构(3);其特征在于,所述输送机构(1)前方设有第一机器人(4),其中第一机器人(4)可延伸至输送机构(1)上方;所述旋转机构(3)前方设有第二机器人(5),其中第二机器人(5)和第一机器人(4)结构相同且位于同一侧;所述焊接机构(2)下方设有下料滑道(6),其中下料滑道(6)末端与收集箱(7)连通。
2.根据权利要求1所述的一种螺母自动焊接设备,其特征在于,所述输送机构(1)和焊接机构(2)四周设有防护栏(8),其中防护栏(8)外侧设有控制箱;所述控制箱内置有plc控制器(9),其中plc控制器(9)分别与第一机器人(4)和第二机器人(5)电性连接。
3.根据权利要求2所述的一种螺母自动焊接设备,其特征在于,所述输送机构(1)包括传输带(101)和柔性振动盘(102),其中柔性振动盘(102)设置在传输带(101)下方。
4.根据权利要求3所述的一种螺母自动焊接设备,其特征在于,所述柔性振动盘(102)上方设有3d工业相机(11),其中3d工业相机(11)与plc控制器(9)电性连接。
5.根据权利要求1所述的一种螺母自动焊接设备,其特征在于,所述输送机构(1)与旋转机构(3)之间设有第一检测相机(12),其中旋转机构(3)与焊接机构(2)之间设有第二检测相机(13);所述第一检测相机(12)和第二检测相机(13)分别与plc控制器(9)电性连接。
6.根据权利要求1所述的一种螺母自动焊接设备,其特征在于,所述第一机器人(4)包括旋转底座(401)、转臂(402)和支撑臂(403),其中转臂(402)下端与旋转底座(401)连接;所述支撑臂(403)一端与转臂(402)上端连接,其中支撑臂(403)另一端设有抓手(404)。
7.根据权利要求1所述的一种螺母自动焊接设备,其特征在于,所述旋转机构(3)包括固定座(301)和与固定座(301)转动连接的转轴,其中转轴前端设有夹紧件(302)。
8.根据权利要求1所述的一种螺母自动焊接设备,其特征在于,所述焊接机构(2)包括本体(201)和焊枪(202),其中焊枪(202)通过伸缩臂与本体(201)连接。
技术总结
本技术公开了一种螺母自动焊接设备,包括输送机构和焊接机构,其中输送机构和焊接机构之间设有旋转机构;所述输送机构前方设有第一机器人;所述旋转机构前方设有第二机器人;所述焊接机构下方设有下料滑道,其中下料滑道末端与收集箱连通。本技术通过PLC控制器控制第一机器人抓取输送机构上的产品,并将产品放置在旋转机构上,根据焊接需求控制旋转机构带动产品进行旋转;然后通过PLC控制器控制第二机器人抓取旋转机构上的产品移动至焊接机构设定的焊接位置,通过焊接机构上的焊枪进行螺母自动焊接,提高螺母焊接的生产效率和准确性,同时可极大地降低生产成本,减少生产者的劳动强度。
技术研发人员:陈琪,文祥
受保护的技术使用者:武汉鹰革精密科技有限公司
技术研发日:20230308
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!