一种抓取稳固的机械手
本技术涉及机械手,具体是一种抓取稳固的机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
2、随着社会的不断发展,科技的不断进步,自动化工业开始普及,为了有效降低工作的劳力支出,能够代替人力进行搬运的机械手开始逐渐普及,但传统的机械手规格大致相同,夹持臂难以针对圆形工件进行夹持,抓取提起的过程中,夹持臂固定不够稳固,圆形工件在机械手夹持过程中容易晃动,圆形工件容易摔落;为此,我们提供了一种抓取稳固的机械手解决以上问题。
技术实现思路
1、本实用新型的目的就是为了弥补现有技术的不足,提供了一种抓取稳固的机械手,能够有效的针对圆形工件进行夹持提取,圆形工件抓取提起过程中较为稳固,避免圆形工件发生晃动,从机械手上跌落。
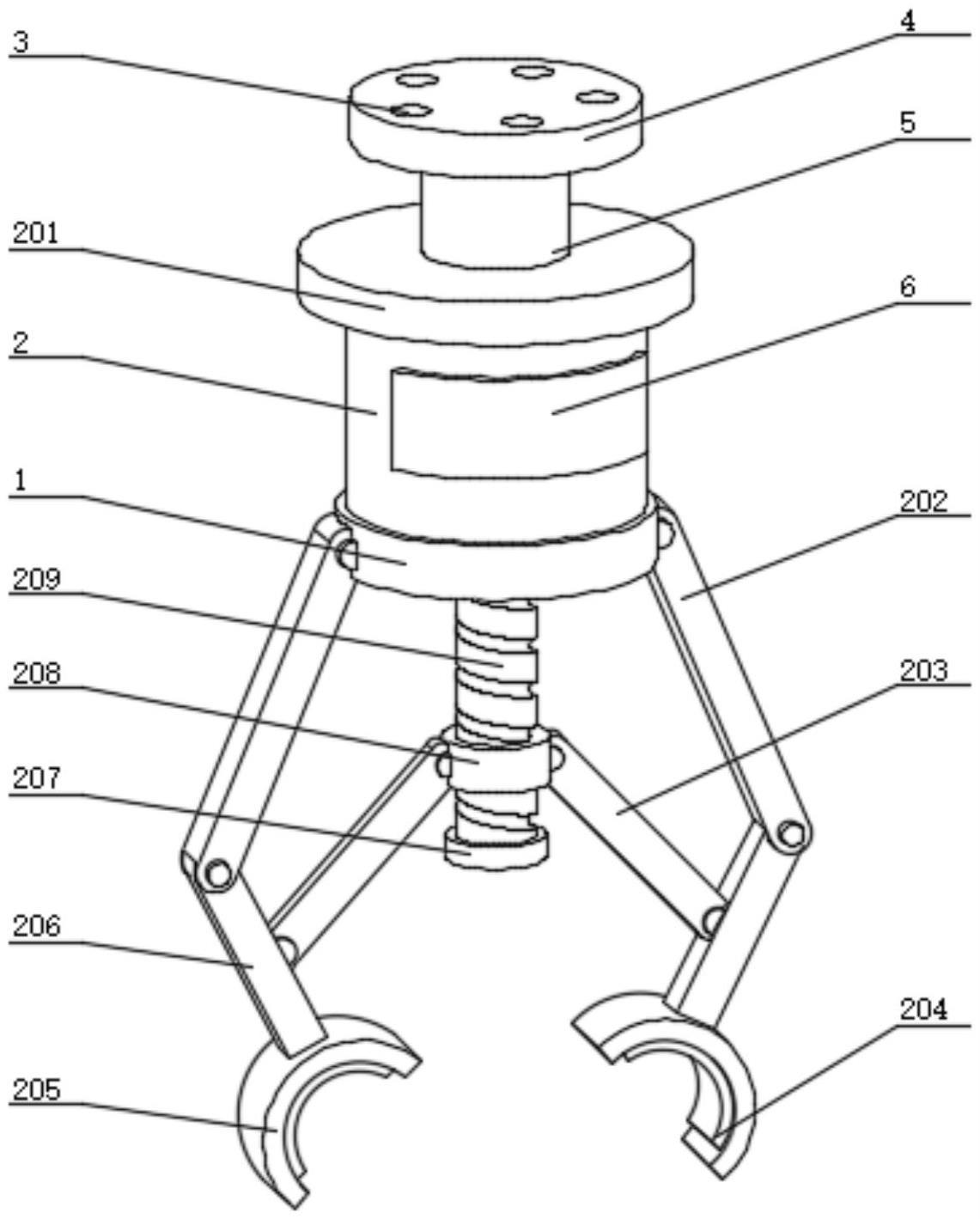
2、为实现上述目的,本实用新型提供如下技术方案:一种抓取稳固的机械手,包括安装板,所述安装板的上表面设有夹持机构,夹持机构包括伺服电机,伺服电机固定连接于安装板的上表面,伺服电机的输出转轴贯穿安装板并延伸至安装板的下部。
3、伺服电机的输出转轴固定连接有螺纹杆,螺纹杆的外表面套设有螺环,螺环的内圈与螺纹杆的外表面螺纹连接。
4、安装板的外表面通过销轴铰接有两个相对称的活动杆,每个活动杆的底端均通过销轴铰接有夹持杆,两个夹持杆相互靠近的一侧面均通过销轴铰接有连动杆,两个连动杆的顶端均通过销轴与螺环的外表面相铰接,每个夹持杆的底端均固定连接有夹持环。
5、进一步的,所述安装板的底面固定镶嵌有轴承,伺服电机的输出转轴贯穿轴承并延伸至安装板的底部,且轴承的内圈与伺服电机输出转轴的外表面固定连接。
6、进一步的,所述螺纹杆的底端均固定连接有限位环,限位环的直径值大于螺纹杆的直径值。
7、进一步的,两个所述夹持环相互靠近的一侧面均固定连接有防滑环,两个防滑环的内圈均开设有防滑纹。
8、进一步的,所述安装板的上表面固定连接有防护罩,伺服电机位于防护罩的内部。
9、进一步的,所述防护罩的上表面固定连接有固定板,固定板的上表面固定连接有固定柱,固定柱的上表面固定连接有连接环,连接环的上表面开设有呈环形阵列的螺孔。
10、进一步的,所述防护罩的外表面固定连接有操作指示板,伺服电机的外表面固定连接有两个稳定板,两个稳定板远离伺服电机的一端均与防护罩的内壁固定连接。
11、与现有技术相比,该抓取稳固的机械手具备如下有益效果:
12、1、本实用新型通过连接环和螺孔便于将本机械手与提起机构连接安装,通过伺服电机带动螺纹杆进行转动,使螺环带动两个连动杆向上移动,夹持杆移动过程中在活动杆的作用下,使两个夹持杆的底端相互靠近,使两个夹持环对圆形工件进行夹持,使其整体能够有效的针圆形工件进行夹持,整体夹持效果较好,有效的避免本机械手在抓取圆形工件的过程中,圆形工件发生晃动,导致工件跌落,造成工件的损坏。
13、2、本实用新型通过轴承能够有效的降低伺服电机工作过程中,伺服电机的输出转轴与安装板之间的摩擦力,避免长时间使用导致伺服电机的输出转轴发生磨损,通过限位环能够有效的对螺环进行限位,避免螺环从螺纹杆的外表面滑出,影响本机械手的正常使用,通过防滑环能够有效的增加夹持环与圆形工件的摩擦力,提高夹持抓取效果,通过防护罩能够有效的对伺服电机进行保护,避免伺服电机暴露在外,通过稳定板能够有效的保证伺服电机工作过程中的稳定性,避免伺服电机发生晃动。
技术特征:
1.一种抓取稳固的机械手,包括安装板(1),其特征在于:所述安装板(1)的上表面设有夹持机构(2),夹持机构(2)包括伺服电机(2012),伺服电机(2012)固定连接于安装板(1)的上表面,伺服电机(2012)的输出转轴贯穿安装板(1)并延伸至安装板(1)的下部;
2.根据权利要求1所述的一种抓取稳固的机械手,其特征在于:所述安装板(1)的底面固定镶嵌有轴承(2011),伺服电机(2012)的输出转轴贯穿轴承(2011)并延伸至安装板(1)的底部,且轴承(2011)的内圈与伺服电机(2012)输出转轴的外表面固定连接。
3.根据权利要求1所述的一种抓取稳固的机械手,其特征在于:所述螺纹杆(209)的底端均固定连接有限位环(207),限位环(207)的直径值大于螺纹杆(209)的直径值。
4.根据权利要求1所述的一种抓取稳固的机械手,其特征在于:两个所述夹持环(205)相互靠近的一侧面均固定连接有防滑环(204),两个防滑环(204)的内圈均开设有防滑纹。
5.根据权利要求1所述的一种抓取稳固的机械手,其特征在于:所述安装板(1)的上表面固定连接有防护罩(2010),伺服电机(2012)位于防护罩(2010)的内部。
6.根据权利要求5所述的一种抓取稳固的机械手,其特征在于:所述防护罩(2010)的上表面固定连接有固定板(201),固定板(201)的上表面固定连接有固定柱(5),固定柱(5)的上表面固定连接有连接环(4),连接环(4)的上表面开设有呈环形阵列的螺孔(3)。
7.根据权利要求5所述的一种抓取稳固的机械手,其特征在于:所述防护罩(2010)的外表面固定连接有操作指示板(6),伺服电机(2012)的外表面固定连接有两个稳定板(7),两个稳定板(7)远离伺服电机(2012)的一端均与防护罩(2010)的内壁固定连接。
技术总结
本技术公开了一种抓取稳固的机械手,涉及机械手技术领域,包括安装板,所述安装板的上表面设有夹持机构,夹持机构包括伺服电机,伺服电机固定连接于安装板的上表面,伺服电机的输出转轴贯穿安装板并延伸至安装板的下部。它能够通过连接环和螺孔便于将本机械手与提起机构连接安装,通过伺服电机带动螺纹杆进行转动,使螺环带动两个连动杆向上移动,夹持杆移动过程中在活动杆的作用下,使两个夹持杆的底端相互靠近,使两个夹持环对圆形工件进行夹持,使其整体能够有效的针圆形工件进行夹持,整体夹持效果较好,有效的避免本机械手在抓取圆形工件的过程中,圆形工件发生晃动,导致工件跌落,造成工件的损坏。
技术研发人员:吴梦涛
受保护的技术使用者:浙江工业大学之江学院
技术研发日:20230321
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!