一种零件夹具切换平台、切换机构和焊接装置的制作方法
本技术涉及零件焊接,具体涉及一种零件夹具切换平台、切换机构和焊接装置。
背景技术:
1、前围散件和后地板散件是汽车前舱轮罩及后地板区域的零件,大都为细长条件,且零件种类多,尺寸差异大,每种零件都需要对应的夹具,导致夹具数量很多,如果每种夹具都要对应的人工或者机器人焊接,则投资成本比较高。
2、现有的技术方案采用机器人+双面转台+抓手输送线的方式,双面转台安装双面夹具,但需要投入同样数量的夹具和抓手,投资成本同样很高;且对应零件总成焊接完成后,机器人便会闲置,导致机器人利用率低。
技术实现思路
1、本实用新型的目的是提供一种零件夹具切换平台、切换机构和焊接装置,降低投资成本,提高焊接机器人的利用率。
2、为解决上述技术问题,本实用新型提供一种零件夹具切换平台,包括底座,以及设置于所述底座的至少一组切换单元,所述切换单元包括顶升机构和限位机构,其中:
3、所述顶升机构包括顶升块和第一驱动部件,所述第一驱动部件的输出轴沿竖直方向延伸,并与所述顶升块连接,所述第一驱动部件能够驱动所述顶升块沿竖直方向移动,所述顶升块用于支撑并定位夹具总成;
4、所述限位机构设置于所述顶升机构的轴向一端,所述限位机构能够在所述夹具总成移动至预设工作位置时与所述夹具总成相抵。
5、本实用新型零件夹具切换平台设置顶升机构起到支撑定位夹具总成的作用,设置限位机构起到对夹具总成的限位作用,使得夹具总成能够稳定地处于预设工作位置,以便于后续的焊接操作。同时,通过本实用新型零件夹具切换平台进行夹具的切换,同一个焊接机器人可完成多种夹具、多种零件的焊接,降低投资成本;且避免焊接机器人闲置,提高焊接机器人的利用率。
6、可选地,所述限位机构包括限位座和限位块,所述限位座具有安装平台,所述限位块安装于所述安装平台的位置沿靠近或远离所述顶升机构的方向可调,所述限位块能够在调节至预设安装位置后与所述限位座相对固定。
7、可选地,所述限位块和所述安装平台对应设置有连接孔,且设置于所述限位块的连接孔和设置于所述安装平台的连接孔中,至少一者为条形孔,所述条形孔沿靠近或远离所述顶升机构的方向延伸,
8、还包括连接件,所述连接件自两个所述连接孔穿过,并固定所述限位块和所述安装平台。
9、可选地,所述限位机构还包括第一到位传感器,所述第一到位传感器安装于所述限位块,所述第一到位传感器沿所述顶升机构的轴向延伸,所述第一到位传感器能够以与所述夹具总成接触为条件发出所述夹具总成到位信号。
10、可选地,所述切换单元还包括导向块,以及第一导向件,所述导向块连接于所述顶升块,所述第一导向件具有沿竖直方向延伸的导向槽,所述导向块部分插装于所述导向槽,并能够沿所述导向槽的延伸方向移动。
11、可选地,所述切换单元还包括第二到位传感器,所述第二到位传感器安装于所述导向块或所述顶升块,所述第二到位传感器沿竖直方向延伸,所述第二到位传感器能够以与所述夹具总成接触为条件发出所述夹具总成到位信号。
12、可选地,所述切换单元还包括支撑机构,所述支撑机构包括支撑块和第二驱动部件,所述支撑块具有支撑平台,所述第二驱动部件的输出轴水平延伸,并与所述支撑块连接,所述第二驱动部件能够驱动所述支撑块沿水平方向移动,所述支撑平台能够支撑所述顶升块,或与所述顶升块错开。
13、可选地,还包括两个第二导向件,两个所述第二导向件分设于所述支撑块的两侧,所述支撑块与所述第二导向件的对应侧壁贴合;
14、和/或,所述切换单元包括顶升机构的数量为两个,所述支撑机构包括所述支撑块的数量也为两个,还包括连接杆,所述连接杆将两个所述支撑块连接于一体,所述第二驱动部件与其中一个所述支撑块连接。
15、可选地,所述切换单元还包括安装座,所述安装座包括连接于一体的上安装板和下安装板,所述上安装板和所述下安装板之间围成安装空间,所述第一驱动部件位于所述安装空间内部,所述顶升机构和所述限位机构均设置于所述上安装板上,所述下安装板支撑于所述底座。
16、本实用新型还提供一种零件夹具切换机构,包括夹具总成,以及前述零件夹具切换平台,所述夹具总成包括底板,设置于所述底板的夹具,以及切换小车,所述底板支撑于所述切换小车,所述切换小车能够将所述夹具总成运送至预设工作位置。
17、本实用新型零件夹具切换机构,包括前述零件夹具切换平台,因此具有与前述零件夹具切换平台相同的技术效果,在此不再赘述。
18、本实用新型还提供一种焊接装置,包括至少一个焊接机器人,每一个所述焊接机器人对应设置一个或多个焊接工位,还包括前述零件夹具切换平台,所述焊接工位设置有所述零件夹具切换平台,所述焊接机器人能够转动,以在不同焊接工位之间切换。
19、可选地,所述焊接机器人具有焊钳,用于连接焊枪,
20、每一个所述焊接机器人还对应设置有焊钳放置架,所述焊钳放置架可放置至少两个所述焊钳。
21、本实用新型焊接装置,包括前述零件夹具切换平台,因此具有与前述零件夹具切换平台相同的技术效果,在此不再赘述。
技术特征:
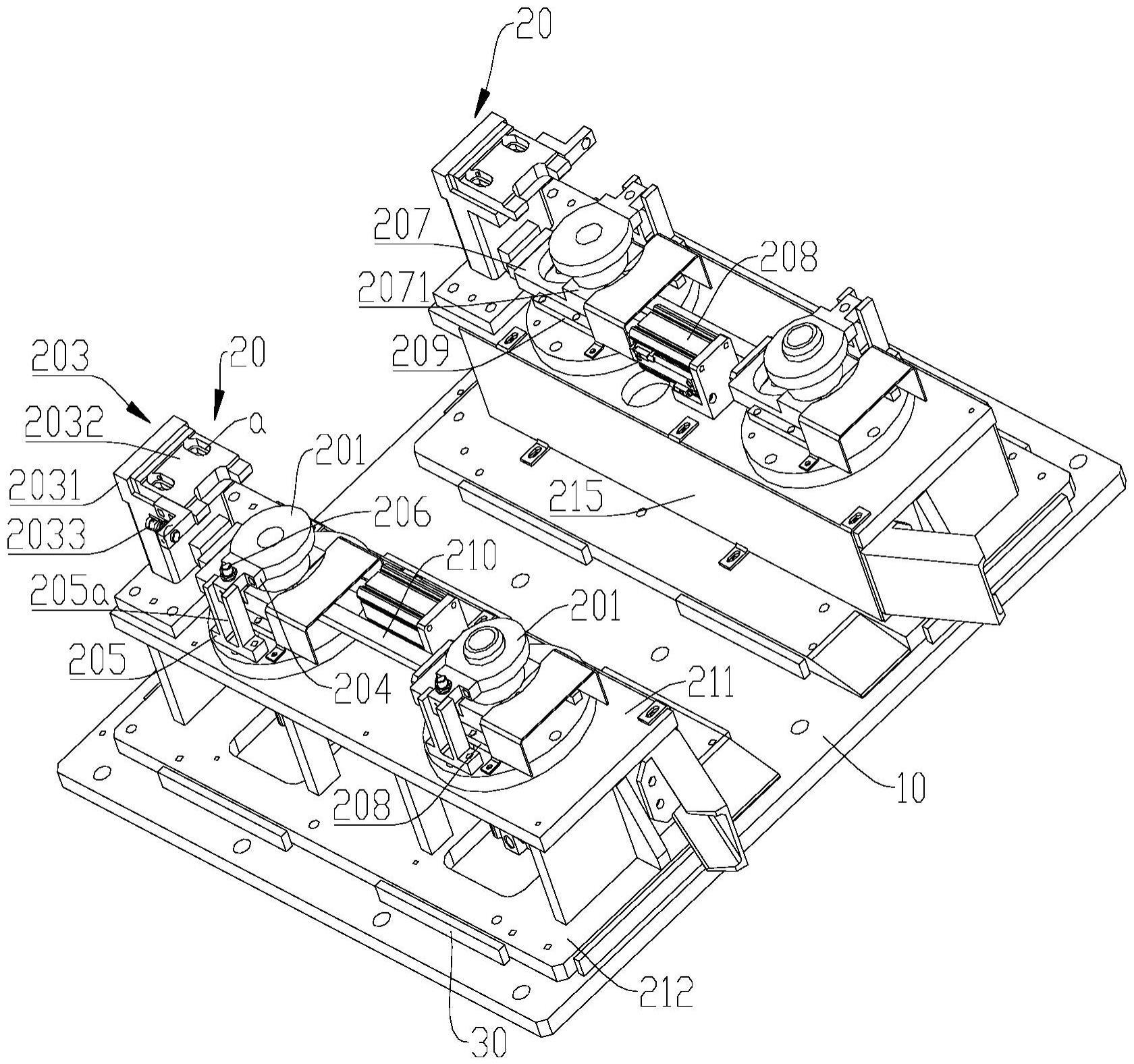
1.一种零件夹具切换平台,其特征在于,包括底座(10),以及设置于所述底座(10)的至少一组切换单元(20),所述切换单元(20)包括顶升机构和限位机构(203),其中:
2.根据权利要求1所述零件夹具切换平台,其特征在于,所述限位机构(203)包括限位座(2031)和限位块(2032),所述限位座(2031)具有安装平台,所述限位块(2032)安装于所述安装平台的位置沿靠近或远离所述顶升机构的方向可调,所述限位块(2032)能够在调节至预设安装位置后与所述限位座(2031)相对固定。
3.根据权利要求2所述零件夹具切换平台,其特征在于,所述限位块(2032)和所述安装平台对应设置有连接孔(a),且设置于所述限位块(2032)的连接孔(a)和设置于所述安装平台的连接孔中,至少一者为条形孔,所述条形孔沿靠近或远离所述顶升机构的方向延伸,
4.根据权利要求3所述零件夹具切换平台,其特征在于,所述限位机构(203)还包括第一到位传感器(2033),所述第一到位传感器(2033)安装于所述限位块(2032),所述第一到位传感器(2033)沿所述顶升机构(200)的轴向延伸,所述第一到位传感器(2033)能够以与所述夹具总成(01)接触为条件发出所述夹具总成(01)到位信号。
5.根据权利要求1-4任一项所述零件夹具切换平台,其特征在于,所述切换单元(20)还包括导向块(204),以及第一导向件(205),所述导向块(204)连接于所述顶升块(201),所述第一导向件(205)具有沿竖直方向延伸的导向槽(205a),所述导向块(204)部分插装于所述导向槽(205a),并能够沿所述导向槽(205a)的延伸方向移动。
6.根据权利要求5所述零件夹具切换平台,其特征在于,所述切换单元(20)还包括第二到位传感器(206),所述第二到位传感器(206)安装于所述导向块(204)或所述顶升块(201),所述第二到位传感器(206)沿竖直方向延伸,所述第二到位传感器(206)能够以与所述夹具总成(01)接触为条件发出所述夹具总成(01)到位信号。
7.根据权利要求1-4任一项所述零件夹具切换平台,其特征在于,所述切换单元(20)还包括支撑机构,所述支撑机构包括支撑块(207)和第二驱动部件(208),所述支撑块(207)具有支撑平台(2071),所述第二驱动部件(208)的输出轴水平延伸,并与所述支撑块(207)连接,所述第二驱动部件(208)能够驱动所述支撑块(207)沿水平方向移动,所述支撑平台(2071)能够支撑所述顶升块(201),或与所述顶升块(201)错开。
8.根据权利要求7所述零件夹具切换平台,其特征在于,还包括两个第二导向件(209),两个所述第二导向件(209)分设于所述支撑块(207)的两侧,所述支撑块(207)与所述第二导向件(209)的对应侧壁贴合;
9.根据权利要求1-4任一项所述零件夹具切换平台,其特征在于,所述切换单元(20)还包括安装座,所述安装座包括连接于一体的上安装板(211)和下安装板(212),所述上安装板(211)和所述下安装板(212)之间围成安装空间,所述第一驱动部件(202)位于所述安装空间内部,所述顶升机构和所述限位机构(203)均设置于所述上安装板(211)上,所述下安装板(212)支撑于所述底座(10)。
10.一种零件夹具切换机构,其特征在于,包括夹具总成(01),以及权利要求1-9任一项所述零件夹具切换平台,所述夹具总成(01)包括底板(011),设置于所述底板(011)的夹具(012),以及切换小车(013),所述底板(011)支撑于所述切换小车(013),所述切换小车(013)能够将所述夹具总成(01)运送至预设工作位置。
11.一种焊接装置,其特征在于,包括至少一个焊接机器人(2),每一个所述焊接机器人(2)对应设置一个或多个焊接工位,还包括权利要求1-9任一项所述零件夹具切换平台,所述焊接工位设置有所述零件夹具切换平台(1),所述焊接机器人(2)能够转动,以在不同焊接工位之间切换。
12.根据权利要求11所述焊接装置,其特征在于,所述焊接机器人(2)具有焊钳,用于连接焊枪,
技术总结
本技术公开一种零件夹具切换平台、切换机构和焊接装置,切换平台包括底座和切换单元,切换单元包括顶升机构和限位机构,顶升机构包括第一驱动部件和用于支撑定位夹具总成的顶升块,第一驱动部件的输出轴竖直延伸与顶升块连接,第一驱动部件驱动顶升块竖直移动;限位机构设置于顶升机构的一端,用于在夹具总成移动至预设工作位置时与夹具总成相抵。本技术零件夹具切换平台,设置顶升机构支撑、定位夹具总成,设置限位机构对夹具总成进行限位,使得夹具总成处于预设工作位置,便于后续焊接操作;通过本技术零件夹具切换平台进行夹具切换,同一个机器人可完成多种零件的焊接,降低投资成本,避免机器人闲置,提高利用率。
技术研发人员:王辉,黄仁果,杨利平,韦乐侠,许丽,张亚坤,苏祺,谢蔚,杨尚灵,庞潮海,黄伟
受保护的技术使用者:柳州五菱汽车工业有限公司
技术研发日:20230323
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!