一种焊接线上料机械手的制作方法
本技术涉及汽车部件焊接线相关,尤其涉及一种焊接线上料机械手。
背景技术:
1、门环是车身结构中的一部分,在对门环的加工过程中,需要通过多个焊接板的焊接处理进而加工为成品的门环。随着国际汽车工业的迅速发展,激光拼焊产品迅速发展,很多复杂汽车零部件都要求焊接成型,尤其是汽车车身的拼焊,同时焊接产品的尺寸精度要求也非常高;激光拼焊技术在工业生产中有着广泛的应用,这对于提高焊接质量、结构可靠性及安全性有着重要的意义。门环类汽车板状结构件的激光拼焊加工需要通过多种加工设备进行多种加工工艺的处理。
2、经过海量检索,发现现有技术公开号为cn205702881u,公开了一种用于激光拼焊生产线的上料机械手。其技术方案是:立柱上部装有支撑架,支撑架上平面水平地装有第一液压缸,第一液压缸的工作端与第二液压缸的固定端铰接,第二液压缸的工作端铰接有机械手手部。支撑架的上平面水平地固定有第一拉绳式位移传感器,第一拉绳式位移传感器的工作端通过第一固定板与第二液压缸的固定端连接;第二拉绳式位移传感器通过第二固定板与第二液压缸固定连接,第二拉绳式位移传感器的工作端通过第三固定板与机械手手部连接。本装置设有液压控制系统和自动控制系统。本实用新型具有结构简单,自动化程度高和使用方便的特点。
3、综上所述,上述的对于汽车板状结构件的送料过程,一般是通过机械手将位于物流叉车上的物料进行抓取然后再放置在待加工的焊接平台上,但是物料在上料至焊接平台之前没有进行预定位处理,会降低物料焊接定位的精度。
4、有鉴于上述的缺陷,本设计人积极加以研究创新,以期创设一种焊接线上料机械手,使其更具有产业上的利用价值。
技术实现思路
1、为解决上述技术问题,本实用新型的目的是提供一种焊接线上料机械手。
2、为实现上述目的,本实用新型采用如下技术方案:
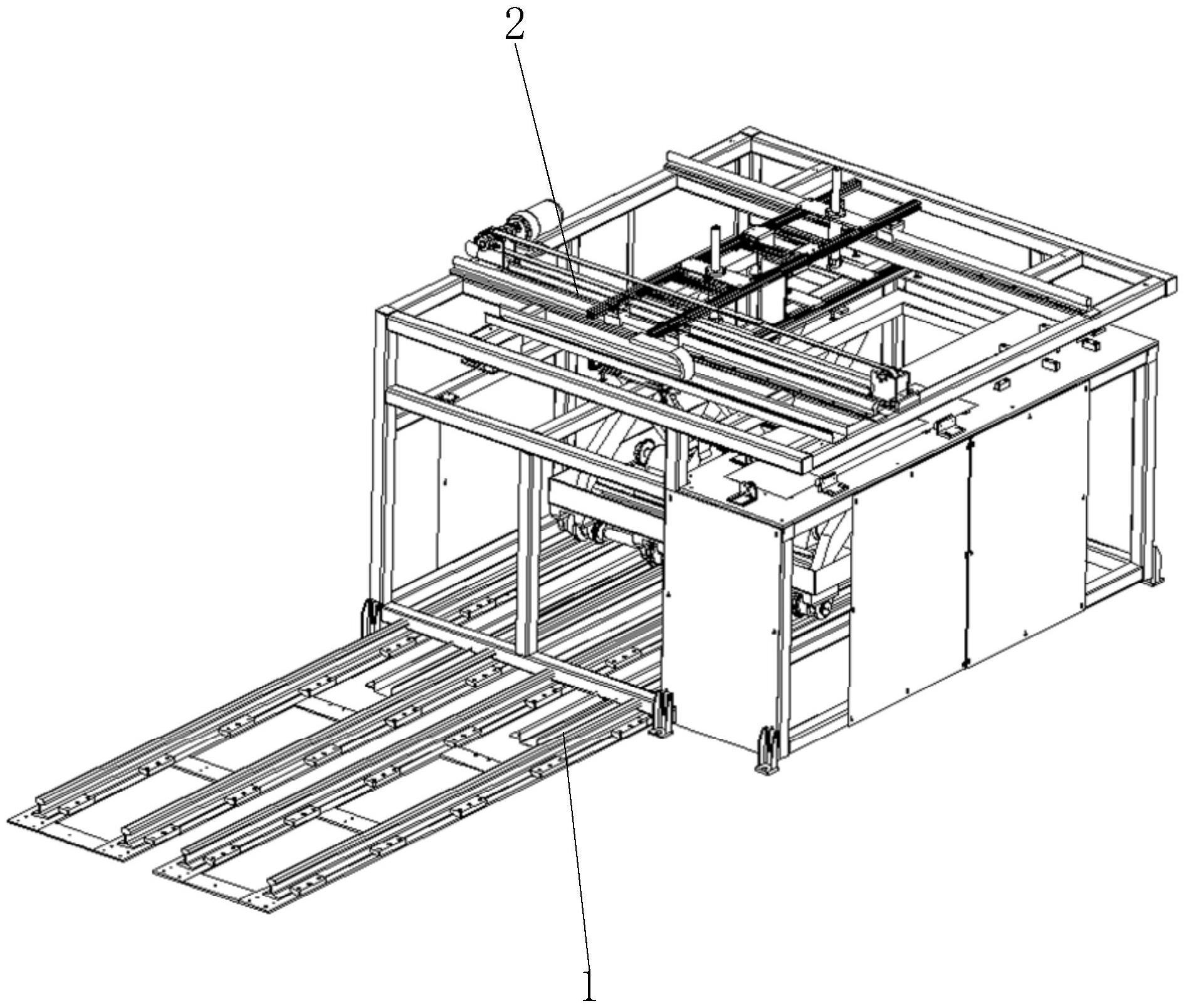
3、一种焊接线上料机械手,包括送料单元和上料单元,上料单元包括上料机架机构和上料转运机构,上料机架机构包括上料机架,上料转运机构安装在上料机架的顶部,送料单元位于上料机架的底部位置;
4、上料单元还包括预定位机构,预定位机构位于上料机架沿着x轴正方向的一侧。
5、作为本实用新型的进一步改进,送料单元包括至少一个送料小车轨道、送料小车、剪叉升降机和升降载架,送料小车轨道位于上料机架的下方且沿着y轴方向设置,送料小车可在送料小车轨道上沿着y轴方向移动,送料小车上安装有剪叉升降机,剪叉升降机的顶部安装有升降载架。
6、作为本实用新型的进一步改进,上料机架上沿着x轴方向的两侧均设置有检测传感器,检测传感器一侧的上料机架上设置有限位挡板。
7、作为本实用新型的进一步改进,上料转运机构包括同步带轮电机、上支撑架、z轴驱动机构、下支撑架和转运机械手,同步带轮电机安装在上料机架上,同步带轮电机的驱动端通过同步带轮机构可驱动上支撑架沿着x轴方向移动,上支撑架的正下方设置有下支撑架,位于上支撑架中部的z轴驱动机构的驱动端可驱动下方的下支撑架沿着z轴方向移动,下支撑架的底部沿着y轴方向均匀的安装有若干个转运机械手。
8、作为本实用新型的进一步改进,上支撑架沿着y轴方向两侧下方的上料机架上均设置有x轴导轨,上支撑架沿着y轴方向两侧的底部均通过x轴滑块与下方的x轴导轨相连接。
9、作为本实用新型的进一步改进,上支撑架一侧的上料机架上还设置有x轴坦克链,上支撑架的一侧与x轴坦克链相连接。
10、作为本实用新型的进一步改进,上支撑架和下支撑架之间还连接设置有若干个z轴导向杆。
11、作为本实用新型的进一步改进,预定位机构包括预定位平台,预定位平台位于上料机架沿着x轴正方向的一侧,预定位平台上设置至少一个定位工位,定位工位上设置有若干个垫块,若干个垫块四周的定位工位上设置有至少一个定位夹紧气缸和至少一个定位靠板。
12、借由上述方案,本实用新型至少具有以下优点:
13、本实用新型通过上料单元中的预定位机构,可以将物料在上料至焊接平台之前进行预定位处理,进而提高物料焊接定位的精度,保证焊接效果;本实用新型依次通过送料单元进行y轴和z轴方向上的送料处理,之后通过上料转运机构将物料在x轴方向上进行上料处理,并上料至预定位机构进行预定位处理。
14、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种焊接线上料机械手,包括送料单元(1)和上料单元(2),所述上料单元(2)包括上料机架机构(7)和上料转运机构(8),所述上料机架机构(7)包括上料机架(10),所述上料转运机构(8)安装在上料机架(10)的顶部,所述送料单元(1)位于上料机架(10)的底部位置;其特征在于:
2.如权利要求1所述的一种焊接线上料机械手,其特征在于,所述送料单元(1)包括至少一个送料小车轨道(3)、送料小车(4)、剪叉升降机(5)和升降载架(6),所述送料小车轨道(3)位于上料机架(10)的下方且沿着y轴方向设置,所述送料小车(4)可在送料小车轨道(3)上沿着y轴方向移动,所述送料小车(4)上安装有剪叉升降机(5),所述剪叉升降机(5)的顶部安装有升降载架(6)。
3.如权利要求1所述的一种焊接线上料机械手,其特征在于,所述上料机架(10)上沿着x轴方向的两侧均设置有检测传感器(11),所述检测传感器(11)一侧的上料机架(10)上设置有限位挡板(12)。
4.如权利要求1所述的一种焊接线上料机械手,其特征在于,所述上料转运机构(8)包括同步带轮电机(13)、上支撑架(15)、z轴驱动机构(16)、下支撑架(20)和转运机械手(21),所述同步带轮电机(13)安装在上料机架(10)上,所述同步带轮电机(13)的驱动端通过同步带轮机构(14)可驱动上支撑架(15)沿着x轴方向移动,所述上支撑架(15)的正下方设置有下支撑架(20),位于所述上支撑架(15)中部的z轴驱动机构(16)的驱动端可驱动下方的下支撑架(20)沿着z轴方向移动,所述下支撑架(20)的底部沿着y轴方向均匀的安装有若干个转运机械手(21)。
5.如权利要求4所述的一种焊接线上料机械手,其特征在于,所述上支撑架(15)沿着y轴方向两侧下方的上料机架(10)上均设置有x轴导轨(18),所述上支撑架(15)沿着y轴方向两侧的底部均通过x轴滑块(19)与下方的x轴导轨(18)相连接。
6.如权利要求4所述的一种焊接线上料机械手,其特征在于,所述上支撑架(15)一侧的上料机架(10)上还设置有x轴坦克链(22),所述上支撑架(15)的一侧与x轴坦克链(22)相连接。
7.如权利要求4所述的一种焊接线上料机械手,其特征在于,所述上支撑架(15)和下支撑架(20)之间还连接设置有若干个z轴导向杆(17)。
8.如权利要求1所述的一种焊接线上料机械手,其特征在于,所述预定位机构(9)包括预定位平台(23),所述预定位平台(23)位于上料机架(10)沿着x轴正方向的一侧,所述预定位平台(23)上设置至少一个定位工位,所述定位工位上设置有若干个垫块(27),若干个所述垫块(27)四周的定位工位上设置有至少一个定位夹紧气缸(24)和至少一个定位靠板(25)。
技术总结
本技术涉及一种焊接线上料机械手,一种焊接线上料机械手,包括送料单元和上料单元,上料单元包括上料机架机构和上料转运机构,上料机架机构包括上料机架,上料转运机构安装在上料机架的顶部,送料单元位于上料机架的底部位置;上料单元还包括预定位机构,预定位机构位于上料机架沿着X轴正方向的一侧。本技术通过上料单元中的预定位机构,可以将物料在上料至焊接平台之前进行预定位处理,进而提高物料焊接定位的精度,保证焊接效果;本技术依次通过送料单元进行Y轴和Z轴方向上的送料处理,之后通过上料转运机构将物料在X轴方向上进行上料处理,并上料至预定位机构进行预定位处理。
技术研发人员:孙远辉,曾广忆,王晓佳,陆胜
受保护的技术使用者:华安钢宝利高新汽车板加工(常熟)有限公司
技术研发日:20230425
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!