一种可自动切割的焊丝夹持机构的制作方法
本技术涉及焊接设备,具体为一种可自动切割的焊丝夹持机构。
背景技术:
1、焊接机器人是从事焊接的工业机器人。根据国际标准化组织(iso)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
2、公开号为cn 213672353 u的专利,公开了一种带有散热机构的智能焊接机器人用焊丝夹持装置,包括主体,所述主体的底部侧面转动连接有焊丝盘,所述焊丝盘上设置有导线管,所述导线管的另一端连接有夹持外壳,所述夹持外壳的内部设置有平衡辊和进丝辊。本实用新型中,设置有主体、焊丝、导线管、第一管体、第二管体、支撑凸起、夹持外壳、平衡辊、弹簧、进丝辊、驱动装置、进气管、出气管、循环箱、止气塞和支撑座结构,平衡辊和弹簧的设置可以使进入的粗细不同的焊丝处于平衡状态,第一管体和第二管体之间持续循环冲入冷却气体,可以对第二管体进行冷却,防止因为进丝速度过快摩擦较大产生大量热量使得焊丝表面的镀层金属脱落影响焊接效果。
3、在实现本实用新型过程中,发明人发现该技术中至少存在如下问题,本装置在进行焊接的过程中,由于缺乏对应的切丝结构,导致装置在使用过程中只能手动进行切丝,不仅存在烫伤的风险,而且手动切丝也会出现切割长度不一致的情况,从而影响使用。
技术实现思路
1、本实用新型的目的在于提供一种可自动切割的焊丝夹持机构,以解决上述背景技术中提出的问题。
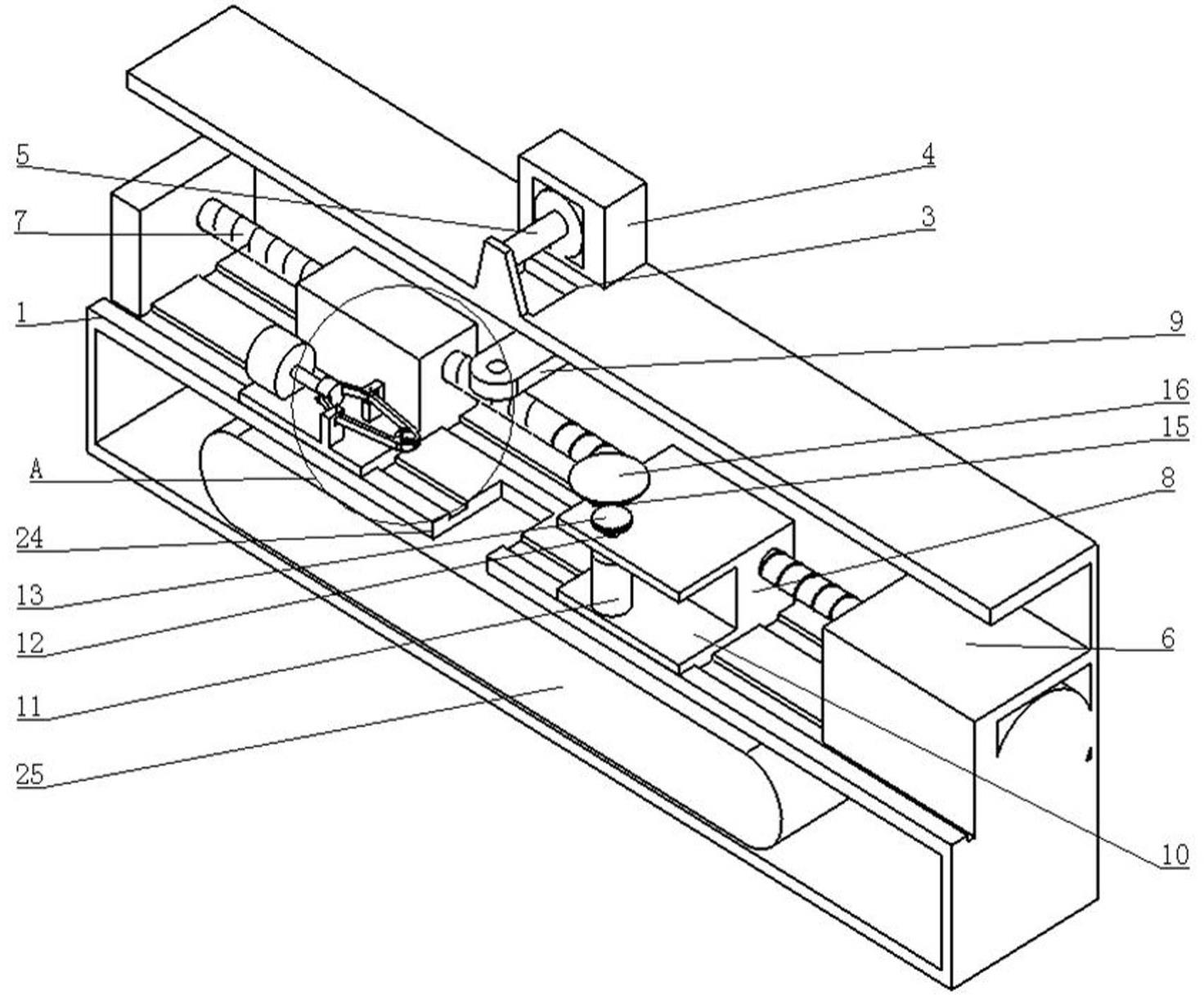
2、为实现上述目的,本实用新型提供如下技术方案:一种可自动切割的焊丝夹持机构,包括工作箱,所述工作箱的顶部固定连接有背板,所述背板的顶部固定连接有顶板,所述顶板的内腔开设有通孔,所述顶板的顶部设置有第一电机,所述顶板的顶部设置有连接座,所述第一电机与连接座之间设置有转动辊,所述工作箱顶部的右侧固定连接有第二电机,所述工作箱顶部的左侧固定连接有固定板,所述第二电机与固定板之间设置有丝杆,所述第二电机与丝杆之间设置有联轴器连接,所述丝杆的外圈螺纹连接有移动块。
3、优选地,所述背板的正面固定连接有固定座,所述固定座的内腔开设有固定孔。
4、优选地,位于右侧的所述移动块的正面开设有第一凹槽,所述第一凹槽内腔的底部设置有第三电机,所述第三电机的顶部设置有转轴,所述转轴的顶部贯穿第一凹槽的内腔并延伸至移动块的顶部,所述转轴顶部的外圈套装有第一齿轮。
5、优选地,位于右侧的所述移动块的顶部活动连接有连杆,所述连杆的外圈套装有第二齿轮,所述第二齿轮与第一齿轮相互啮合,所述第二齿轮的顶部固定连接有刀片。
6、优选地,位于左侧的所述移动块的正面开设有第二凹槽,所述第二凹槽内腔的左侧固定连接有电动推杆,所述电动推杆的右侧固定连接有移动盘,所述移动盘的右侧铰接有夹持杆,所述夹持杆的右侧固定连接有限位环。
7、优选地,所述工作箱的顶部开设有滑槽,所述移动块的底部固定连接有滑块,所述滑块设置在滑槽的内腔中。
8、优选地,所述工作箱的正面开设有第三凹槽,所述工作箱内腔的底部固定连接有传送带。
9、与现有技术相比,本实用新型的有益效果是:
10、该可自动切割的焊丝夹持机构,通过第三电机、转轴和第一齿轮的配合,第三电机启动,带动转轴与第一齿轮进行转动。由于第二齿轮与第一齿轮相互啮合,因此第二齿轮也会转动,随即带动顶部的刀片进行转动,对焊丝进行切割。随后电动推杆伸长,带动夹持杆展开,限位环远离从而使得焊丝通过第三凹槽掉落至传送带上,并通过传送带进行运输,如此反复,配合第一电机的匀速转动,使得焊丝匀速移动与定长切割,既避免了人为切割的费时费力与烫伤风险,也实现了切割长度的精确性。
11、该可自动切割的焊丝夹持机构,通过第二电机和丝杆的配合,启动第二电机,带动丝杆进行转动,进而带动丝杆外圈的移动块进行移动。移动块的底部固定连接有滑块,滑块可在滑槽的内腔中滑动,因此会限制移动块的移动方向。丝杆的螺纹方向为双向,因此丝杆转动的过程中会带动两侧的移动块相互靠近,实现切割。
技术特征:
1.一种可自动切割的焊丝夹持机构,包括工作箱(1),其特征在于:所述工作箱(1)的顶部固定连接有背板,所述背板的顶部固定连接有顶板(2),所述顶板(2)的内腔开设有通孔(3),所述顶板(2)的顶部设置有第一电机(4),所述顶板(2)的顶部设置有连接座,所述第一电机(4)与连接座之间设置有转动辊(5),所述工作箱(1)顶部的右侧固定连接有第二电机(6),所述工作箱(1)顶部的左侧固定连接有固定板,所述第二电机(6)与固定板之间设置有丝杆(7),所述第二电机(6)与丝杆(7)之间设置有联轴器连接,所述丝杆(7)的外圈螺纹连接有移动块(8)。
2.根据权利要求1所述的一种可自动切割的焊丝夹持机构,其特征在于:所述背板的正面固定连接有固定座(9),所述固定座(9)的内腔开设有固定孔。
3.根据权利要求1所述的一种可自动切割的焊丝夹持机构,其特征在于:位于右侧的所述移动块(8)的正面开设有第一凹槽(10),所述第一凹槽(10)内腔的底部设置有第三电机(11),所述第三电机(11)的顶部设置有转轴(12),所述转轴(12)的顶部贯穿第一凹槽(10)的内腔并延伸至移动块(8)的顶部,所述转轴(12)顶部的外圈套装有第一齿轮(13)。
4.根据权利要求1所述的一种可自动切割的焊丝夹持机构,其特征在于:位于右侧的所述移动块(8)的顶部活动连接有连杆(14),所述连杆(14)的外圈套装有第二齿轮(15),所述第二齿轮(15)与第一齿轮(13)相互啮合,所述第二齿轮(15)的顶部固定连接有刀片(16)。
5.根据权利要求1所述的一种可自动切割的焊丝夹持机构,其特征在于:位于左侧的所述移动块(8)的正面开设有第二凹槽(17),所述第二凹槽(17)内腔的左侧固定连接有电动推杆(18),所述电动推杆(18)的右侧固定连接有移动盘(19),所述移动盘(19)的右侧铰接有夹持杆(20),所述夹持杆(20)的右侧固定连接有限位环(21)。
6.根据权利要求1所述的一种可自动切割的焊丝夹持机构,其特征在于:所述工作箱(1)的顶部开设有滑槽(22),所述移动块(8)的底部固定连接有滑块(23),所述滑块(23)设置在滑槽(22)的内腔中。
7.根据权利要求1所述的一种可自动切割的焊丝夹持机构,其特征在于:所述工作箱(1)的正面开设有第三凹槽(24),所述工作箱(1)内腔的底部固定连接有传送带(25)。
技术总结
本技术公开了一种可自动切割的焊丝夹持机构,包括工作箱,工作箱的顶部固定连接有背板,背板的顶部固定连接有顶板,顶板的内腔开设有通孔,顶板的顶部设置有第一电机,顶板的顶部设置有连接座,第一电机与连接座之间设置有转动辊,工作箱顶部的右侧固定连接有第二电机,工作箱顶部的左侧固定连接有固定板。该可自动切割的焊丝夹持机构,第三电机启动,带动转轴与第一齿轮进行转动。由于第二齿轮与第一齿轮相互啮合,因此第二齿轮也会转动,随即带动顶部的刀片进行转动,对焊丝进行切割,并通过传送带进行运输,如此反复,配合第一电机的匀速转动,使得焊丝匀速移动与定长切割,既避免了人为切割的费时费力,也实现了切割长度的精确性。
技术研发人员:刘华,许显华,田小琴
受保护的技术使用者:十堰庶人科技有限公司
技术研发日:20230428
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!