数控机床的送料机构的制作方法
本技术涉及数控机床,具体为数控机床的送料机构。
背景技术:
1、主要用于轴类零件或盘类零件的内外圆柱面、任意锥角的内外圆锥面、复杂回转内外曲面和圆柱、圆锥螺纹等切削加工,并能进行切槽、钻孔、扩孔、铰孔及镗孔等,在对工件加工前,需要使用送料机构将工件移动至机床的工作区域。
2、例如公告号cn203738478u的中国授权专利《一种数控机床的自动送料》,包括设置在机床上方的导槽,导槽内安装有可在导槽内滑动的升降装置,升降装置内设置有升降杆和驱动升降杆上下移动的电机,升降杆的下端安装有机械爪,导槽左前方的机床上倾斜设置有带夹传输带,带夹传输带的一侧设置有零件探测器i,机床上的自动装卸门前侧设置有零件探测器ii。
3、上述现有技术虽能够将工件送入至数控机床的工作区,但是灵活性较差,对于数控机床的安装环境要求较为严格,且无法配合料仓实现工件之间的来回运转,因此不满足现有的需求,对此我们提出了数控机床的送料机构。
技术实现思路
1、本实用新型的目的在于提供数控机床的送料机构,以解决上述背景技术中提出的数控机床的送料机构因灵活性较差导致对安装环境较为苛刻以及无法快速实现工件往返运转的问题。
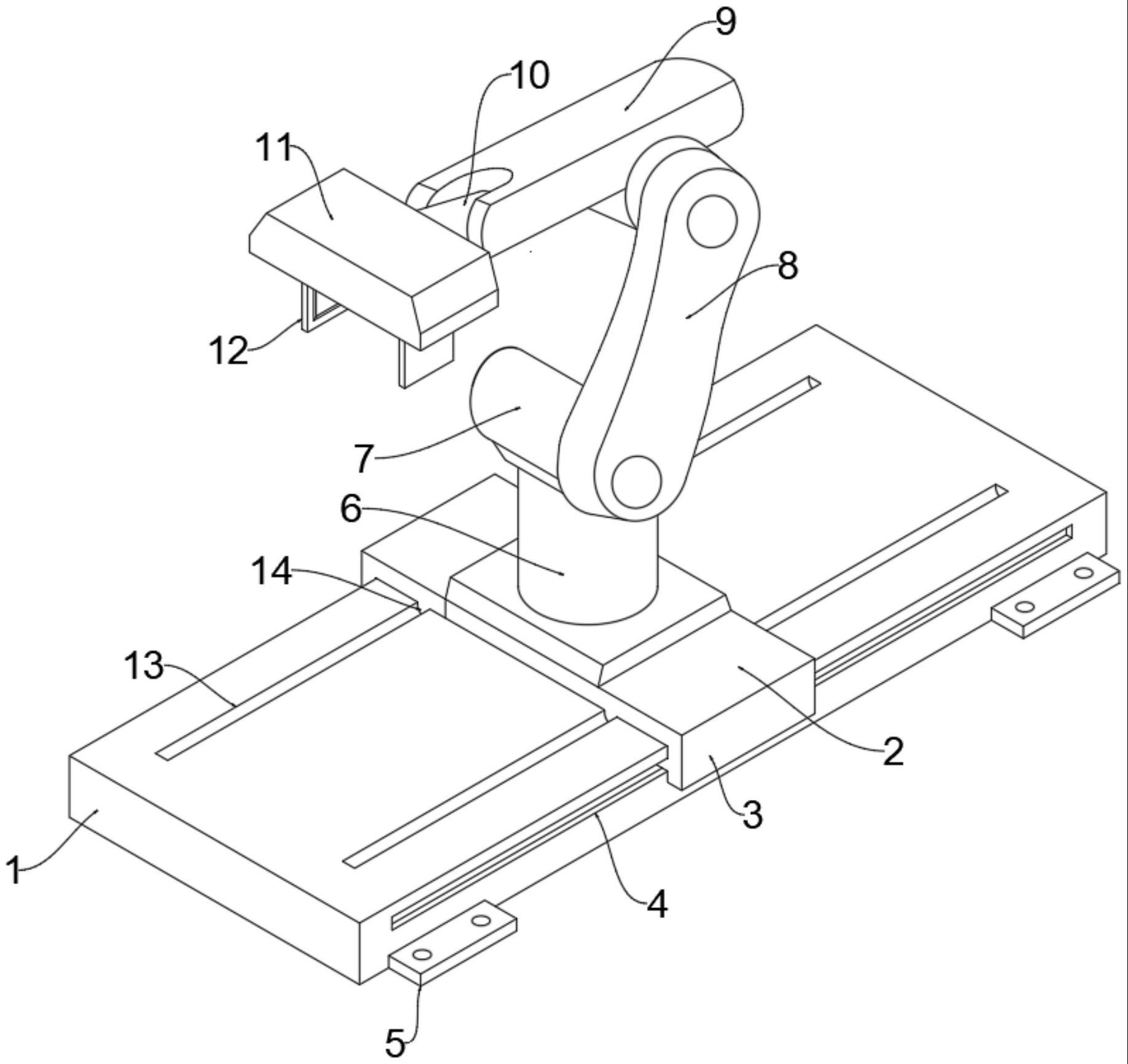
2、为实现上述目的,本实用新型提供如下技术方案:数控机床的送料机构,包括固定座,所述固定座的上方设置有活动座,所述活动座的两侧均固定设置有侧板,且侧板与固定座通过滑槽滑动配合;还包括:
3、第一旋转座,其固定设置在所述活动座的上方,所述第一旋转座的上端转动安装有第二旋转座,所述第二旋转座的一侧转动安装有第一调节臂,所述第一调节臂一侧的上端转动安装有第二调节臂,所述第二调节臂的前端转动安装有第三旋转座;
4、夹持装置,其设置在所述第三旋转座的前端,且第三旋转座与夹持装置转动连接,所述夹持装置下方的两侧均安装有夹板,所述夹板的内部均安装有触板。
5、优选的,所述固定座内部的两侧均转动安装有单螺纹传动杆,所述单螺纹传动杆的外部均安装有第一滑块,所述第一滑块的一侧与侧板相固定,所述单螺纹传动杆的一端固定安装有从动锥形齿轮,所述固定座内部的前端安装有双轴电机,所述双轴电机两端的输出轴均固定安装有主动锥形齿轮,且主动锥形齿轮与从动锥形齿轮啮合连接。
6、优选的,所述固定座上端面的两侧均设置有导向槽,所述活动座底部的两侧均固定设置有导向块,且导向块与导向槽滑动限位。
7、优选的,所述触板与夹板的内腔滑动连接,所述触板与夹板之间设置有压力传感器,压力传感器的固定端与夹板相连接,且压力传感器的检测端与触板相接触,所述压力传感器的输出端连接有单片机。
8、优选的,所述夹持装置的内部转动安装有双螺纹传动杆,所述双螺纹传动杆的外部堆成安装有第二滑块,所述第二滑块的下端与夹板相固定,所述双螺纹传动杆的一端固定设置有传动齿轮,所述双螺纹传动杆一端的上方设置有伺服电机,且伺服电机的输入端与单片机的输出端电性连接,所述伺服电机的输出轴安装有驱动齿轮,且驱动齿轮与传动齿轮啮合连接。
9、优选的,所述第一旋转座、第二旋转座、第一调节臂、第二调节臂和第三旋转座均由电机驱动。
10、优选的,所述固定座两侧的前后均焊接固定有安装块。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本实用新型通过设有机械臂,机械臂由第一旋转座、第二旋转座、第一调节臂、第二调节臂和第三旋转座组成,第一旋转座内部的电机带动第二旋转座实现一轴调节,第一旋转座内部的电机带动第一调节臂实现二轴调节,第一调节臂内部的电机带动第二调节臂实现三轴调节,第二调节臂内部的电机带动第三旋转座实现四轴调节,第三旋转座内部的电机带动夹持装置实现五轴调节,在该机械臂的作用下能够令夹持装置按照设定程序进行灵活移动,最大程度克服安装环境的限制,实现工件至料仓之间的移动,灵活性得到有效提高。
13、2、本实用新型通过设有活动座位移机构,通过开启双轴电机,两端的输出轴分别带动主动锥形齿轮进行旋转,在与从动锥形齿轮的啮合下实现两个单螺纹传动杆同步旋转,单螺纹传动杆与第一滑块的内螺孔相摩擦,配合固定座内槽对第一滑块的导向作用,从而令第一滑块带动活动座进行平移,进而实现上方机械臂的位移,该结构能够完成机械臂往返于数控机床和仓料之间,进一步提高位移灵活性,同时在固定座的上端面设有导向槽,活动座底部的两侧设有导向块,在导向块限位在导向槽的内部,从而确保活动座移动过程的稳定性。
14、3、本实用新型通过设有夹持装置,对工件进行夹持时,开启伺服电机,其输出轴上的驱动齿轮在与传动齿轮的啮合下带动双螺纹传动杆进行旋转,而第二滑块与双螺纹传动杆在螺纹摩擦下将旋转运动转化为直线运动,从而令下方的两个夹板朝工件方向进行同速移动,直至接触工件的表面,此时触板对压力传感器造成挤压,压力传感器能够对压力数值进行监测,当数值达到设定值后,表示夹持力适中,伺服电机停止运行,并通过机械臂将工件移送至机床内部的工作区,该结构不仅能够针对不同规格的工件进行灵活夹持,而且加持力度适中,在保证稳定性的前提下不会造成对工件的损坏。
技术特征:
1.数控机床的送料机构,包括固定座(1),所述固定座(1)的上方设置有活动座(2),所述活动座(2)的两侧均固定设置有侧板(3),且侧板(3)与固定座(1)通过滑槽(4)滑动配合;
2.根据权利要求1所述的数控机床的送料机构,其特征在于:所述固定座(1)内部的两侧均转动安装有单螺纹传动杆(15),所述单螺纹传动杆(15)的外部均安装有第一滑块(16),所述第一滑块(16)的一侧与侧板(3)相固定,所述单螺纹传动杆(15)的一端固定安装有从动锥形齿轮(19),所述固定座(1)内部的前端安装有双轴电机(17),所述双轴电机(17)两端的输出轴均固定安装有主动锥形齿轮(18),且主动锥形齿轮(18)与从动锥形齿轮(19)啮合连接。
3.根据权利要求1所述的数控机床的送料机构,其特征在于:所述固定座(1)上端面的两侧均设置有导向槽(13),所述活动座(2)底部的两侧均固定设置有导向块(14),且导向块(14)与导向槽(13)滑动限位。
4.根据权利要求1所述的数控机床的送料机构,其特征在于:所述触板(23)与夹板(12)的内腔滑动连接,所述触板(23)与夹板(12)之间设置有压力传感器(22),压力传感器(22)的固定端与夹板(12)相连接,且压力传感器(22)的检测端与触板(23)相接触,所述压力传感器(22)的输出端连接有单片机。
5.根据权利要求4所述的数控机床的送料机构,其特征在于:所述夹持装置(11)的内部转动安装有双螺纹传动杆(20),所述双螺纹传动杆(20)的外部堆成安装有第二滑块(21),所述第二滑块(21)的下端与夹板(12)相固定,所述双螺纹传动杆(20)的一端固定设置有传动齿轮(26),所述双螺纹传动杆(20)一端的上方设置有伺服电机(24),且伺服电机(24)的输入端与单片机的输出端电性连接,所述伺服电机(24)的输出轴安装有驱动齿轮(25),且驱动齿轮(25)与传动齿轮(26)啮合连接。
6.根据权利要求1所述的数控机床的送料机构,其特征在于:所述第一旋转座(6)、第二旋转座(7)、第一调节臂(8)、第二调节臂(9)和第三旋转座(10)均由电机驱动。
7.根据权利要求1所述的数控机床的送料机构,其特征在于:所述固定座(1)两侧的前后均焊接固定有安装块(5)。
技术总结
本技术公开了数控机床的送料机构,包括固定座,所述固定座的上方设置有活动座,所述活动座的两侧均固定设置有侧板,且侧板与固定座通过滑槽滑动配合;还包括:第一旋转座,其固定设置在所述活动座的上方,所述第一旋转座的上端转动安装有第二旋转座,所述第二旋转座的一侧转动安装有第一调节臂,所述第一调节臂一侧的上端转动安装有第二调节臂,所述第二调节臂的前端转动安装有第三旋转座;夹持装置,其设置在所述第三旋转座的前端,且第三旋转座与夹持装置转动连接,所述夹持装置下方的两侧均安装有夹板,所述夹板的内部均安装有触板,送料机构的灵活性得到提高较,提高了与机床安装的适配性,同时能够快速实现工件的往返运转。
技术研发人员:钱利斌,张荣伟
受保护的技术使用者:常州市利凯数控科技有限公司
技术研发日:20230502
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!