一种六方软爪的制作方法
本技术属于车床夹具,具体涉及一种六方软爪。
背景技术:
1、在车削批量较大的工件时,为了提高工件在加工时的定位精度和节约工件安装时的辅助时间,可利用软爪卡盘。为了根据实际需要随时改变爪面圆弧直径与形状,把三爪卡盘淬火的卡爪,改换为低碳钢、铜或铝合金卡爪,软爪卡盘适用于已加工表面作为定位精基准,在大批量生产时进行工件的半精车与精车。
2、现有技术存在的问题:
3、大部分夹具中的软爪其所能使用的范围是固定的,即不同类型的软爪,且所能夹持的零件的范围是不同的,例如,用于夹持中大型零件的夹具无法夹持小型零件,进而需要通过更换整个夹具的方式来完成夹持的目的,但是存在部分夹具,在只需更换夹具爪头的前提下解决该问题,然而此结构会存在另一个问题,由于夹具除爪头之外的结构均不改变,在夹持小型零件时,将导致夹具爪头与零件之间的距离过大,因此需要人工临时将零件放置在某处,直到各爪头夹持零件后方才放手,此过程,需要花费大量时间在等待爪头移动的过程上,且一旦操作失误,零件位置出现偏差,零件很可能无法直接被爪头夹住。
技术实现思路
1、本实用新型的目的是提供一种六方软爪,能够解决一般夹具无法夹持极小零件的问题,扩大该夹具的夹持范围,还可尽早地将零件临时固定在最佳的夹持位置上。
2、本实用新型采取的技术方案具体如下:
3、一种六方软爪,包括夹具座,所述夹具座的表面环形阵列式贯穿开设有直导槽,且所述夹具座的表面通过直导槽滑动式组装有软爪体,所述夹具座的内部转动安装有转管,所述转管的顶部固定安装有用于驱动软爪体滑动的转盘;
4、所述夹具座的表面中心处贯穿开设有三支通槽,所述夹具座内部并位于转管的内部固定安装有内置柱体,所述内置柱体的顶端边缘环形阵列式固定设置有转座,且所述内置柱体的顶端边缘通过转座转动组装有定位夹臂,所述定位夹臂的顶端贯穿三支通槽并用于临时定位小零件;
5、所述软爪体靠近夹具座中心处的一端均开设有爪头槽,且所述软爪体通过爪头槽可拆卸式组装有六方爪头以及圆爪头。
6、所述爪头槽的底部均开设有螺孔,且所述六方爪头以及圆爪头均通过固定螺钉螺接入螺孔内的方式进行组装。
7、所述爪头槽的一侧开设有用于供六方爪头一棱边嵌入的角槽。
8、所述转盘的边缘环形阵列式开设有弧线槽,所述软爪体的底部均固定连接有底杆,且所述底杆贯穿直导槽并插入弧线槽的内部。
9、所述转管靠近转盘一端的外表面固定安装有斜齿轮一,所述夹具座的内部一端固定安装有电机,且所述电机的输出端固定安装有斜齿轮二,所述斜齿轮一与所述斜齿轮二相啮合。
10、所述定位夹臂的中部贯穿式开设有直通槽,所述内置柱体的内部固定安装有气缸,且所述气缸的伸缩端末端固定连接有环架,所述环架的内壁环形阵列式固定设置有杆架,而所述杆架的末端分别活动贯穿于对应的直通槽。
11、所述环架升降式组装于所述夹具座的内部且同时位于转管的内部,而所述环架的外径尺寸小于所述转管的内径尺寸。
12、本实用新型取得的技术效果为:
13、本实用新型,当六方爪头与软爪体组装时,此时的软爪体与六方爪头配合可以实现夹持固定小尺寸零件的效果,如图所示,三个六方爪头聚拢时,其拼接处缝隙可无线接近于零,从而实现夹持尺寸极小的零件,另外当圆爪头与软爪体组装时,可实现用于夹持固定传统大尺寸零件的效果,解决一般大小的夹具无法夹持极小零件的问题,进一步扩大该夹具的夹持范围。
14、本实用新型,在夹持极小零件之前,通过启动气缸使所有的定位夹臂同时聚拢旋转,此时定位夹臂的顶端将不断接近,以此来实现临时固定小零件的效果,随后再通过控制软爪体实现固定夹持的工作,此过程,解决因软爪体移动距离过长而导致工作人员无法快速将零件放置在最佳位置上的问题,不再需要花费大量时间在等待爪头移动的过程上,且能尽早地将零件临时固定在最佳的夹持位置上,避免爪头出现没夹住零件的情况。
技术特征:
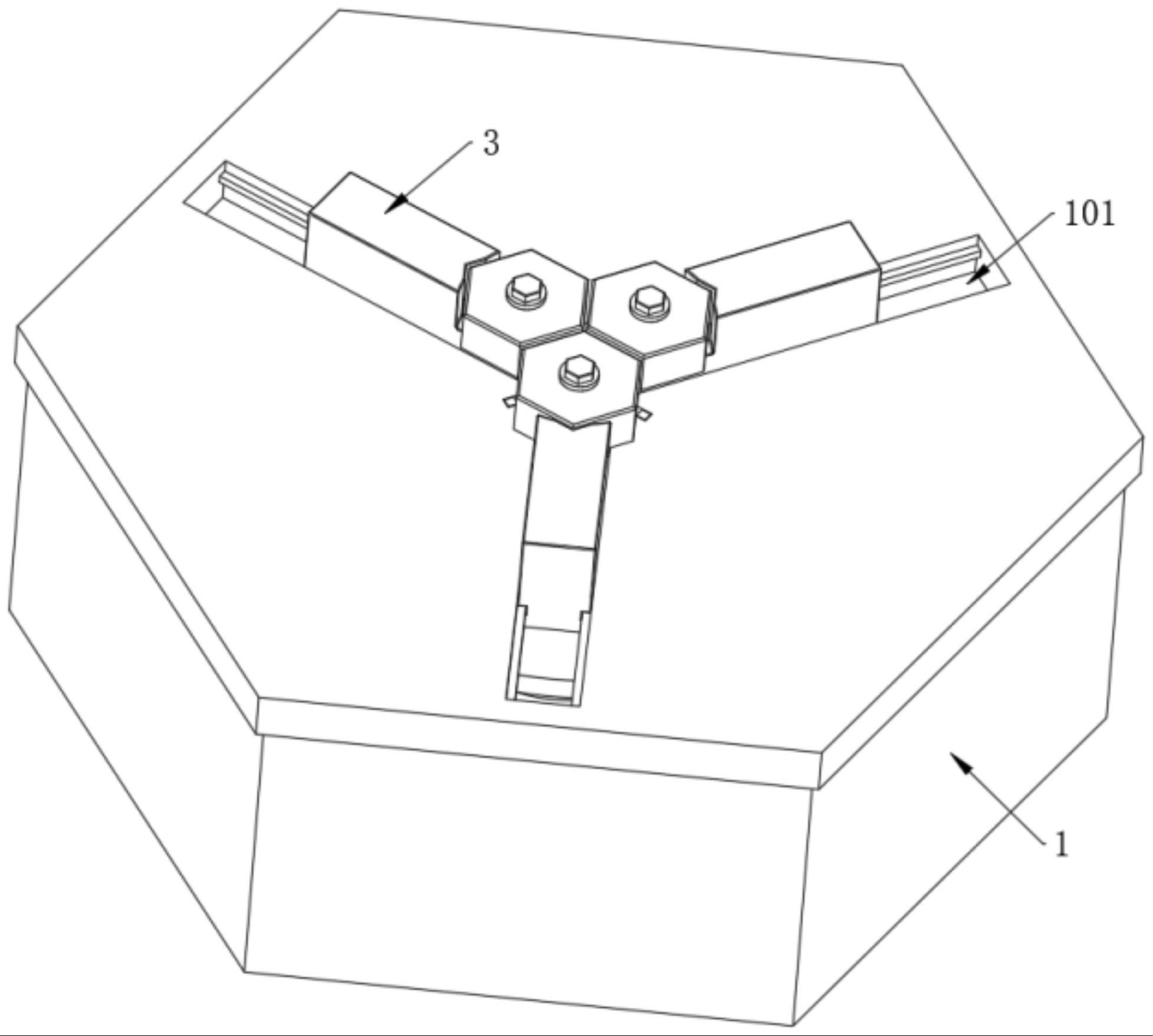
1.一种六方软爪,包括夹具座(1),其特征在于:所述夹具座(1)的表面环形阵列式贯穿开设有直导槽(101),且所述夹具座(1)的表面通过直导槽(101)滑动式组装有软爪体(3),所述夹具座(1)的内部转动安装有转管(2),所述转管(2)的顶部固定安装有用于驱动软爪体(3)滑动的转盘(202);
2.根据权利要求1所述的一种六方软爪,其特征在于:所述爪头槽(301)的底部均开设有螺孔(303),且所述六方爪头(304)以及圆爪头(305)均通过固定螺钉(306)螺接入螺孔(303)内的方式进行组装。
3.根据权利要求2所述的一种六方软爪,其特征在于:所述爪头槽(301)的一侧开设有用于供六方爪头(304)一棱边嵌入的角槽(302)。
4.根据权利要求1所述的一种六方软爪,其特征在于:所述转盘(202)的边缘环形阵列式开设有弧线槽(203),所述软爪体(3)的底部均固定连接有底杆(307),且所述底杆(307)贯穿直导槽(101)并插入弧线槽(203)的内部。
5.根据权利要求4所述的一种六方软爪,其特征在于:所述转管(2)靠近转盘(202)一端的外表面固定安装有斜齿轮一(201),所述夹具座(1)的内部一端固定安装有电机(4),且所述电机(4)的输出端固定安装有斜齿轮二(401),所述斜齿轮一(201)与所述斜齿轮二(401)相啮合。
6.根据权利要求1所述的一种六方软爪,其特征在于:所述定位夹臂(502)的中部贯穿式开设有直通槽(503),所述内置柱体(5)的内部固定安装有气缸(506),且所述气缸(506)的伸缩端末端固定连接有环架(504),所述环架(504)的内壁环形阵列式固定设置有杆架(505),而所述杆架(505)的末端分别活动贯穿于对应的直通槽(503)。
7.根据权利要求6所述的一种六方软爪,其特征在于:所述环架(504)升降式组装于所述夹具座(1)的内部且同时位于转管(2)的内部,而所述环架(504)的外径尺寸小于所述转管(2)的内径尺寸。
技术总结
本技术属于车床夹具技术领域,具体涉及一种六方软爪,包括夹具座,所述夹具座的表面环形阵列式贯穿开设有直导槽,且所述夹具座的表面通过直导槽滑动式组装有软爪体,所述夹具座的内部转动安装有转管,所述转管的顶部固定安装有用于驱动软爪体滑动的转盘,所述夹具座的表面中心处贯穿开设有三支通槽,所述夹具座内部并位于转管的内部固定安装有内置柱体,且所述内置柱体的顶端边缘通过转座转动组装有定位夹臂,所述定位夹臂的顶端贯穿三支通槽并用于临时定位小零件。本技术解决一般夹具无法夹持极小零件的问题,扩大该夹具的夹持范围,还可尽早地将零件临时固定在最佳的夹持位置上。
技术研发人员:罗佳明,张万鑫
受保护的技术使用者:洛阳尚昊电子科技有限公司
技术研发日:20230508
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!