一种涂装机器人的开盖装置的制作方法
本技术涉及喷涂机器人的,具体是一种涂装机器人的开盖装置。
背景技术:
1、车身焊接完成至总装喷涂车间时,车身前引整盖处于闭合状态,为了防止车身内部生锈,在自动喷涂过程中,需由开盖机器人钩住引擎盖上设有的工装将其开启,由喷涂机器人完成内表面喷涂作业,最后再由开盖机器人将引擎盖关闭。
2、传统的,汽车的开盖机器人一般设置于开门轨道上,并安装有尼龙钩,汽车的喷涂作业则由喷涂机器人完成,两者为单独的结构,需要通过单独的控制系统进行控制,整体结构效率较低,空间占用大,并且手臂未端的开盖器没有感应到位系统,只是简单的机械结构,当开盖装置出现破坏或者其他原因导致引擎盖未打开时,不能收到报警信号,从而出现雾化器与车身相撞的情况,对雾化器和车身造成一定的破坏,导致较大的经济损失,同时现有的尼龙钩为刚性结构,与车身引擎盖接触时容易造成车身的损伤。
3、综上所述,现有的开盖装置在实际生产中,其占用的空间较大,同时易造成车身引擎盖的损伤。
技术实现思路
1、本实用新型的目的在于提供一种涂装机器人的开盖装置,减少开盖器所占用的空间,避免对车身引擎盖造成损伤。
2、实用新型为实现上述目的,通过以下技术方案实现:
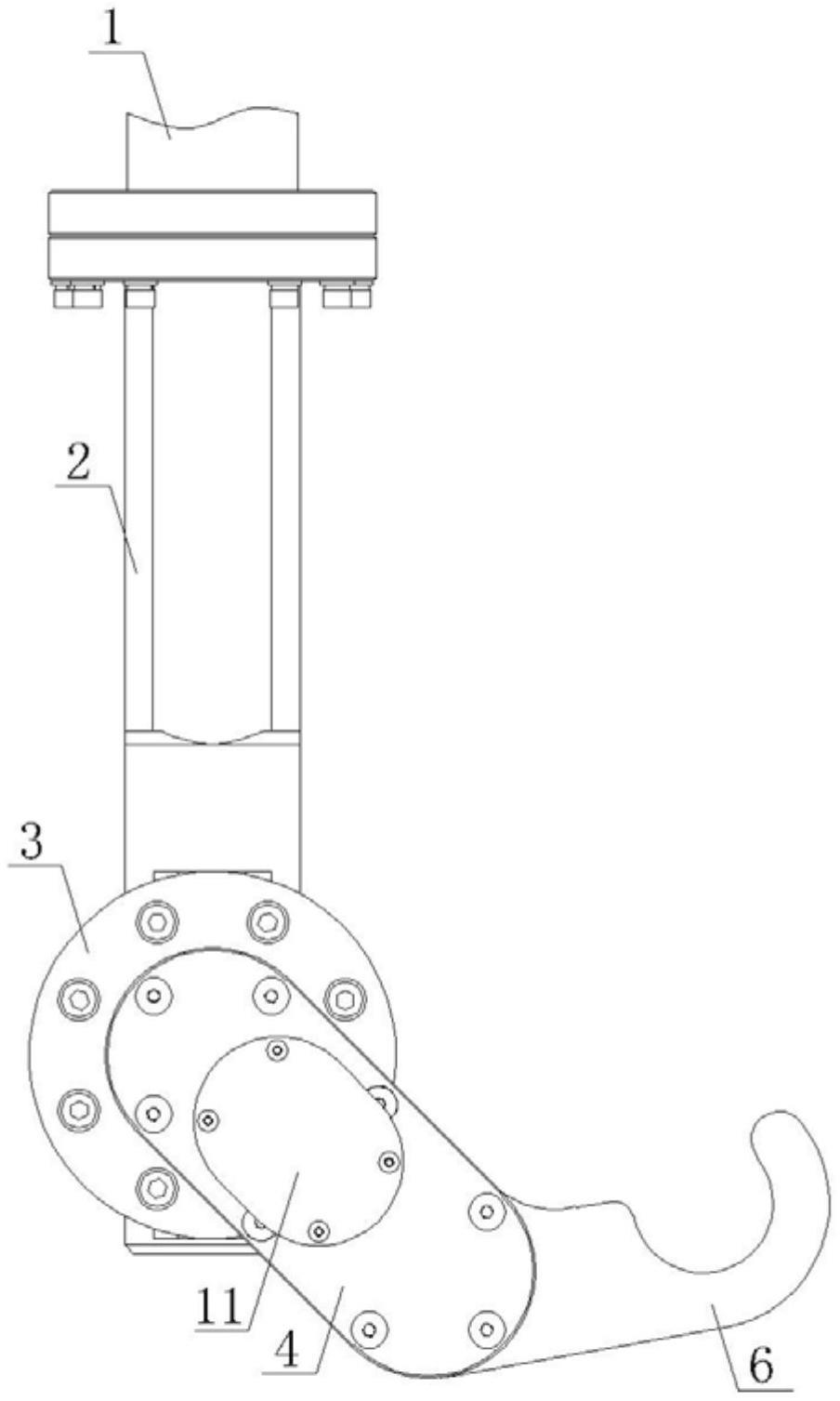
3、一种涂装机器人的开盖装置,包括设置在涂装机器人上的开盖器,所述开盖器包括设置在涂装机器人底部的臂式法兰盘,所述臂式法兰盘的端部转动连接有固定座,所述固定座的端部转动连接有感应杆,所述感应杆上设有尼龙钩,所述感应杆的端部设有感应部,所述感应部与固定座之间设有复位弹簧,所述固定座上滑动连接有滑块,所述滑块上设有与感应部配合使用的感应器,所述固定座的一侧设有配合感应器使用的观察窗。
4、进一步的,所述滑块上设有凹槽,所述感应器的底部设有与凹槽转动连接的凸块。
5、进一步的,所述滑块上设有多个连通凹槽的限位槽,所述凸块的侧面设有与限位槽配合使用的限位块。
6、进一步的,所述固定座上对称的设有多个固定槽,所述滑块上滑动连接有与固定槽插接配合的固定块。
7、进一步的,所述凸块与凹槽滑动连接,所述凸块的端部和固定块的一侧均设有斜面,两个所述斜面滑动接触,所述固定块与滑块之间设有拉簧。
8、进一步的,所述滑块上设有u形槽,所述滑块的一侧设有螺栓,所述螺栓穿过u形槽后与固定座螺纹连接。
9、对比现有技术,本实用新型的有益效果在于:
10、1、通过臂式法兰盘将开盖器固定在喷涂机器人上,使得喷涂机器人自身实现引擎盖的开启与闭合,无需单独设置到位结构和控制系统,降低了整体结构的复杂性,减少整体装置所占用的空间;
11、2、通过设置在感应杆上的尼龙钩与安装在汽车车盖上的工装配合,将汽车车盖打开,同时感应杆在固定座上转动并压缩复位弹簧,使得感应杆的端部靠近感应器,当感应器感应到感应杆后,感应器输送到位信号发送给喷涂机器人上,从而对车身进行喷涂工作,当开盖器出现破坏或者其他原因导致引擎盖未打开时,尼龙钩处于初始位置,感应器未能接收感应部传递的到位信号时,将发出报警信号到控制中心,并停机待操作人员确认无误后,方才继续进行喷涂工作,避免雾化器与车身相撞,此外,设有的复位弹簧可以缓冲车盖与尼龙钩之间产生的作用力,避免刚性接触损坏车身;
12、3、通过观察窗在固定座上滑动滑块,从而调节感应器的位置,同时便于观察感应器位置是否合适,使得感应器感应更加灵敏,减少感应器误判的情况。
技术特征:
1.一种涂装机器人的开盖装置,包括设置在涂装机器人(1)上的开盖器(2),其特征在于:所述开盖器(2)包括设置在涂装机器人(1)底部的臂式法兰盘(3),所述臂式法兰盘(3)的端部转动连接有固定座(4),所述固定座(4)的端部转动连接有感应杆(5),所述感应杆(5)上设有尼龙钩(6),所述感应杆(5)的端部设有感应部(7),所述感应部(7)与固定座(4)之间设有复位弹簧(8),所述固定座(4)上滑动连接有滑块(9),所述滑块(9)上设有与感应部(7)配合使用的感应器(10),所述固定座(4)的一侧设有配合感应器(10)使用的观察窗(11)。
2.根据权利要求1所述一种涂装机器人的开盖装置,其特征在于:所述滑块(9)上设有凹槽(12),所述感应器(10)的底部设有与凹槽(12)转动连接的凸块(13)。
3.根据权利要求2所述一种涂装机器人的开盖装置,其特征在于:所述滑块(9)上设有多个连通凹槽(12)的限位槽(14),所述凸块(13)的侧面设有与限位槽(14)配合使用的限位块(15)。
4.根据权利要求3所述一种涂装机器人的开盖装置,其特征在于:所述固定座(4)上对称的设有多个固定槽(16),所述滑块(9)上滑动连接有与固定槽(16)插接配合的固定块(17)。
5.根据权利要求4所述一种涂装机器人的开盖装置,其特征在于:所述凸块(13)与凹槽(12)滑动连接,所述凸块(13)的端部和固定块(17)的一侧均设有斜面,两个所述斜面滑动接触,所述固定块(17)与滑块(9)之间设有拉簧(18)。
6.根据权利要求1所述一种涂装机器人的开盖装置,其特征在于:所述滑块(9)上设有u形槽(19),所述滑块(9)的一侧设有螺栓(20),所述螺栓(20)穿过u形槽(19)后与固定座(4)螺纹连接。
技术总结
本技术公开了一种涂装机器人的开盖装置,主要涉及涂装机器人的技术领域。包括设置在涂装机器人上的开盖器,所述开盖器包括设置在涂装机器人底部的臂式法兰盘,所述臂式法兰盘的端部转动连接有固定座,所述固定座的端部转动连接有感应杆,所述感应杆上设有尼龙钩,所述感应杆的端部设有感应部,所述感应部与固定座之间设有复位弹簧,所述固定座上滑动连接有滑块,所述滑块上设有与感应部配合使用的感应器,所述固定座的一侧设有配合感应器使用的观察窗。本技术的有益效果在于:减少开盖器所占用的空间,避免对车身引擎盖造成损伤。
技术研发人员:郑贤哲,刘毅,孙军,王泽鑫,靳新乾,李前进,来右鑫,胡耀华
受保护的技术使用者:济南希润自动化科技有限公司
技术研发日:20230509
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!