一种焊接用工业机器人的制作方法
本技术涉及工业机器人,尤其是一种焊接用工业机器人。
背景技术:
1、焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等;
2、具体的,而现有夹紧固定机器人焊接位置调整复杂,导致焊接效率降低,而现有技术中针对这一问题做出了相对应的改进,如公开号为cn202223020037.x公开了一种工业焊接机器人用工件固定装置,通过设置第二电动推杆、第三电动推杆、刻度盘、第一电机、夹持杆、夹持块、丝杆以及第二电机,将工件根据预定位置放置在两个夹持块之间,控制第二电机,第二电机带动丝杆转动,丝杆带动两个夹持块相向运动夹持工件,而在实际使用过程中,整个被夹紧的配件长时间处于悬空状态,易出现跌落的情况,同时对配件夹紧之前,需要前后左右均进行调整,进而一定程度长增加了配件夹紧的繁琐型。
3、因此,希望提供一种焊接用工业机器人,通过放置台的设置,通过通过放置台的作用,使其整个配件在加工时,平稳放置的同时。
技术实现思路
1、在本实施例中提供了一种焊接用工业机器人用于解决被夹紧的配件长时间处于悬空状态,易出现跌落的问题。
2、根据本实用新型的一个方面,提供了一种焊接用工业机器人,包括放置台与连接机构,所述放置台侧壁与箱体固定连接,所述箱体内壁与滑动板滑动连接,所述滑动板侧壁固定连接的侧块与调节杆固定连接,所述调节杆侧壁固定连接的固定板与侧杆通槽内壁滑动连接;
3、所述连接机构包括滑动杆、连接柱、连接板、固定杆和限位杆,所述固定杆与竖板螺纹连接,且固定杆的空腔内壁滑动连接的滑动块与圆形连接板侧壁固定连接,且连接板侧壁螺纹连接的连接柱与滑动杆固定连接,所述滑动杆侧壁与挤压板侧壁转动连接。
4、进一步地,所述箱体滑动连接的横杆与推动板固定连接,且横杆侧壁与侧杆固定连接,所述侧杆外壁螺纹连接的限位环与固定板两端的弧形面螺纹连接。
5、进一步地,所述放置台侧壁与竖板固定连接,所述竖板空腔内壁安装警报器触发控制开关。
6、进一步地,所述挤压板侧壁与触发板固定连接,且触发板与竖板滑动连接。
7、进一步地,所述固定杆侧壁与密封板插接,且密封板侧壁固定连接的贴合板与固定杆侧壁贴合,所述固定杆螺纹连接的限位杆与密封板螺纹连接。
8、进一步地,所述连接板与密封板之间的固定杆空腔内设有复位弹簧。
9、通过本实用新型上述实施例,采用了放置台的设置,解决被夹紧的配件长时间处于悬空状态,易出现跌落的问题,取得了较好的实用效果。
技术特征:
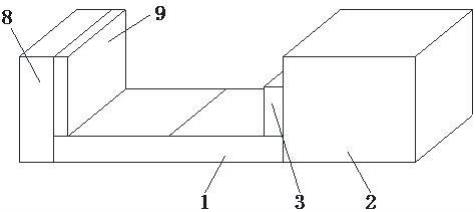
1.一种焊接用工业机器人,其特征在于:包括放置台(1)与连接机构,所述放置台(1)侧壁与箱体(2)固定连接,所述箱体(2)内壁与滑动板(4)滑动连接,所述滑动板(4)侧壁固定连接的侧块与调节杆(5)固定连接,所述调节杆(5)侧壁固定连接的固定板(6)与侧杆(7)通槽内壁滑动连接;
2.根据权利要求1所述的一种焊接用工业机器人,其特征在于:所述箱体(2)滑动连接的横杆与推动板(3)固定连接,且横杆侧壁与侧杆(7)固定连接,所述侧杆(7)外壁螺纹连接的限位环与固定板(6)两端的弧形面螺纹连接。
3.根据权利要求1所述的一种焊接用工业机器人,其特征在于:所述放置台(1)侧壁与竖板(8)固定连接,所述竖板(8)空腔内壁安装警报器触发控制开关。
4.根据权利要求1所述的一种焊接用工业机器人,其特征在于;所述挤压板(9)侧壁与触发板(10)固定连接,且触发板(10)与竖板(8)滑动连接。
5.根据权利要求1所述的一种焊接用工业机器人,其特征在于:所述固定杆(14)侧壁与密封板插接,且密封板侧壁固定连接的贴合板与固定杆(14)侧壁贴合,所述固定杆(14)螺纹连接的限位杆(15)与密封板螺纹连接。
6.根据权利要求1所述的一种焊接用工业机器人,其特征在于:所述连接板(13)与密封板之间的固定杆(14)空腔内设有复位弹簧。
技术总结
本技术公开了一种焊接用工业机器人,包括放置台、箱体、推动板、滑动板、调节杆、固定板、侧杆、竖板、挤压板、触发板、滑动杆、连接柱、连接板、固定杆和限位杆。通过放置台的设置,通过放置台的作用,使其整个配件在加工时,平稳放置的同时,通过配合挤压板与推动板的作用,使其通过左右的两侧之间,进而简化了被焊接的配件固定时的操作步骤,且通过调节杆的作用,进而可根据不同配件的尺寸作出相对应的调整。
技术研发人员:谢佳村,张秀孟
受保护的技术使用者:重庆创志机器人有限公司
技术研发日:20230516
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!