一种取料机械手的制作方法
本申请涉及机械手领域,尤其是涉及一种取料机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,能够提高生产的效率,如今在生产线上常使用桁架机械手进行工件的运输。
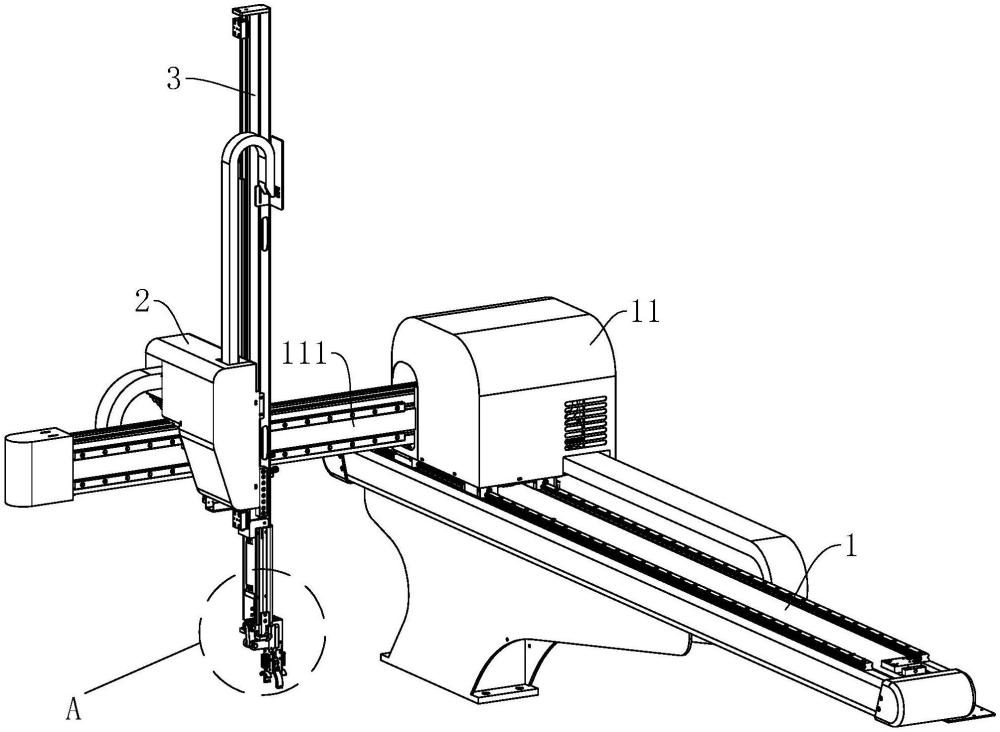
2、现有的桁架机械手包括桁架,桁架上沿桁架的长度方向滑动安装有安装座,安装座沿垂直于桁架的方向固定设有水平的悬臂,悬臂上沿悬臂的长度方向滑动安装有支撑座,支撑座位于平台的上方,且支撑座的一侧沿竖直方向升降安装有长条状的竖直的升降轨,升降轨的下端固定设有用于抓取工件的气动夹爪,气动夹爪设有抓持腔,能够将平台上的工件抓持在抓持腔内,并沿桁架的长度方向将工件运到相应地点
3、对于上述中的相关技术,夹持工件时,工件位于气动夹爪内,工件的外周侧与气动夹爪的内周侧相抵接,使得工件紧固的夹持在气动夹爪内,气动夹爪的大小相对固定,对较小的工件进行夹持时,工件易在气动夹爪内产生滑动并从气动夹爪内滑脱。
技术实现思路
1、为了提高对工件夹持的稳定性,本申请提供一种取料机械手。
2、本申请提供的一种取料机械手采用如下的技术方案:
3、一种取料机械手,包括升降轨,所述升降轨上设有抓持座,所述抓持座上固定设有气动夹爪,所述气动夹爪内设有用于夹持工件的抓持腔,所述抓持座上设有夹持板和用于驱使夹持板自抓持座朝向气动夹爪的方向抵向工件的驱动件,所述驱动件固定设于抓持座上。
4、通过采用上述技术方案,启动气动夹爪,能够将工件夹持在抓持腔内,然后启动驱动件,能够驱使夹持板靠近工件,使得夹持板将工件抵接在抓持腔内,夹持板和气动夹住相配合,能够从工件周侧对工件进行夹持固定,在对较小的工件进行夹持时,能够有效的将工件夹持并固定在抓持腔内,整体上提高了机械手对工件夹持的稳定性。
5、可选的,所述驱动件包括气缸,所述夹持板安装在驱动件的输出轴上。
6、通过采用上述技术方案,气缸结构简单,稳定性较高,能够提高夹持板夹持的稳定系,操作方便。
7、可选的,所述驱动件的输出轴上一体同轴固定设有弹性伸缩杆,所述夹持板固定连接在弹性伸缩杆远离驱动件的一端。
8、通过采用上述技术方案,启动驱动件并驱使夹持板抵向工件,夹持板碰撞到工件时,弹性伸缩杆能够相应的变形缩短,减小了夹持板对工件的冲击,减少了工件受到的损伤,有利于保持工件表面的完好。
9、可选的,所述夹持板远离驱动件的一侧呈弧形。
10、通过采用上述技术方案,夹持板夹持工件时,夹持板的弧形侧能够对工件进行限位,从而提高了夹持板对工件夹持的稳定性,进一步的提高了对工件的夹持效果。
11、可选的,所述夹持板远离驱动件的一侧固定设有防滑垫。
12、通过采用上述技术方案,防滑垫增强了夹持板上的摩擦,夹持板对工件进行夹持时,工件与防滑垫上的摩擦力增大,工件不易从夹持板上滑动。
13、可选的,所述夹持板设有两个,两个所述夹持板位于气动夹爪的两侧,所述驱动件和弹性伸缩杆一一对应夹持板设有两组。
14、通过采用上述技术方案,两个夹持板相配合,能够从气动夹爪的两侧抵向工件,能够增强工件在气动夹爪上抓持的平衡性,提高了对工件的抓持效果。
15、可选的,所述抓持座铰接于升降轨上,所述抓持座的铰接轴线与升降轨的长度方向相垂直,所述升降轨上设有用于驱使抓持座沿抓持座的铰接轴线转动的推动件。
16、通过采用上述技术方案,控制推动件,能够驱使抓持座转动,方便于对工件的角度进行调节。
17、可选的,所述推动件的输出轴上铰接有传动杆,所述传动杆远离推动件的一端铰接在抓持座上,所述传动杆的两端的铰接轴线均与抓持座上的铰接轴线相平行。
18、通过采用上述技术方案,推动杆的输出轴缩短,能够驱传动杆拉动抓持座转动,能够较方便的实现对抓持座角度的调节,能够有效的调节工件的角度。
19、综上所述,本申请包括以下至少一种有益技术效果:
20、1.启动驱动件,能够驱使夹持板抵向工件,当防滑垫与工件相抵接时,夹持板和气动夹住能够从工件的周侧对工件进行夹持,从而有效的对工件进行夹持固定;
21、2.弹性伸缩杆能够对夹持板提供缓冲,当夹持板对工件进行夹持时,弹性伸缩杆减小了夹持板与工件之间的撞击,有效的保护了工件;
22、3.通过推动件和传动杆的相互配合,能够驱使抓持座沿其铰接轴线转动,方便于操作者改变工件的角度。
技术特征:
1.一种取料机械手,包括升降轨(3),其特征在于:所述升降轨(3)上设有抓持座(4),所述抓持座(4)上固定设有气动夹爪(5),所述气动夹爪(5)内设有用于夹持工件的抓持腔(51),所述抓持座(4)上设有夹持板(8)和用于驱使夹持板(8)自抓持座(4)朝向气动夹爪(5)的方向抵向工件的驱动件(7),所述驱动件(7)固定设于抓持座(4)上。
2.根据权利要求1所述的一种取料机械手,其特征在于:所述驱动件(7)包括气缸,所述夹持板(8)安装在驱动件(7)的输出轴上。
3.根据权利要求2所述的一种取料机械手,其特征在于:所述驱动件(7)的输出轴上一体同轴固定设有弹性伸缩杆(71),所述夹持板(8)固定连接在弹性伸缩杆(71)远离驱动件(7)的一端。
4.根据权利要求1所述的一种取料机械手,其特征在于:所述夹持板(8)远离驱动件(7)的一侧呈弧形。
5.根据权利要求4所述的一种取料机械手,其特征在于:所述夹持板(8)远离驱动件(7)的一侧固定设有防滑垫(81)。
6.根据权利要求3所述的一种取料机械手,其特征在于:所述夹持板(8)设有两个,两个所述夹持板(8)位于气动夹爪(5)的两侧,所述驱动件(7)和弹性伸缩杆(71)一一对应夹持板(8)设有两组。
7.根据权利要求1所述的一种取料机械手,其特征在于:所述抓持座(4)铰接于升降轨(3)上,所述抓持座(4)的铰接轴线与升降轨(3)的长度方向相垂直,所述升降轨(3)上设有用于驱使抓持座(4)沿抓持座(4)的铰接轴线转动的推动件(31)。
8.根据权利要求7所述的一种取料机械手,其特征在于:所述推动件(31)的输出轴上铰接有传动杆(6),所述传动杆(6)远离推动件(31)的一端铰接在抓持座(4)上,所述传动杆(6)的两端的铰接轴线均与抓持座(4)上的铰接轴线相平行。
技术总结
本申请公开了一种取料机械手,涉及机械手领域,其包括桁架,桁架上沿滑动安装有安装座,安装座的一侧焊接有悬臂,悬臂与桁架的长度方向相垂直,悬臂上沿悬臂的长度方向滑动安装有支撑座,支撑座上沿竖直方向升降安装有竖直的升降轨;升降轨的下端铰接有抓持座,抓持座上固定设有气动夹爪,气动夹住内设有抓持腔,气动夹爪夹持工件时,能够将工件夹持在抓持腔内;抓持座上固定设有驱动件,驱动件为气缸,驱动件的输出轴呈竖直,驱动件的输出轴端部设有夹持板。启动驱动件,能够从工件的上侧将工件夹持在气动夹爪内,本申请提高了对工件夹持的稳定性。
技术研发人员:白振敏
受保护的技术使用者:上海通喜模塑科技有限公司
技术研发日:20230526
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!