一种端盖焊接机器人工作站的制作方法
:本技术涉及焊接工作站领域,尤其涉及一种端盖焊接机器人工作站。
背景技术
0、
背景技术:
1、近些年来,随着智能化的快速发展,机器人技术领域逐渐成熟,焊接机器人在焊接效率与自动化程度方面得到不断优化,由于焊接稳定且焊接质量高,已取得高度的认可并且在各个领域应用愈发广泛。
2、在目前现有技术中通常机器人焊接过程为:首先由工人将工件用夹具固定,之后定位完成后由焊接机器人执行焊接作业,作业完成后工人再将工件由此拆卸,循环操作。在整个过程中,尽管机器人的焊接效率较高,但是工件焊接前的固定与焊接后的拆卸工作大都需要消耗人工操作时间,从而人工操作时间要多于机器人运行时间,使得整体有效时间间隔过长,工作效率仍较低。
技术实现思路
0、
技术实现要素:
1、本实用新型的目的是针对现有技术的问题,提供一种自动化程度高、易于操作、人工劳动强度小、工作效率高的一种端盖焊接机器人工作站。
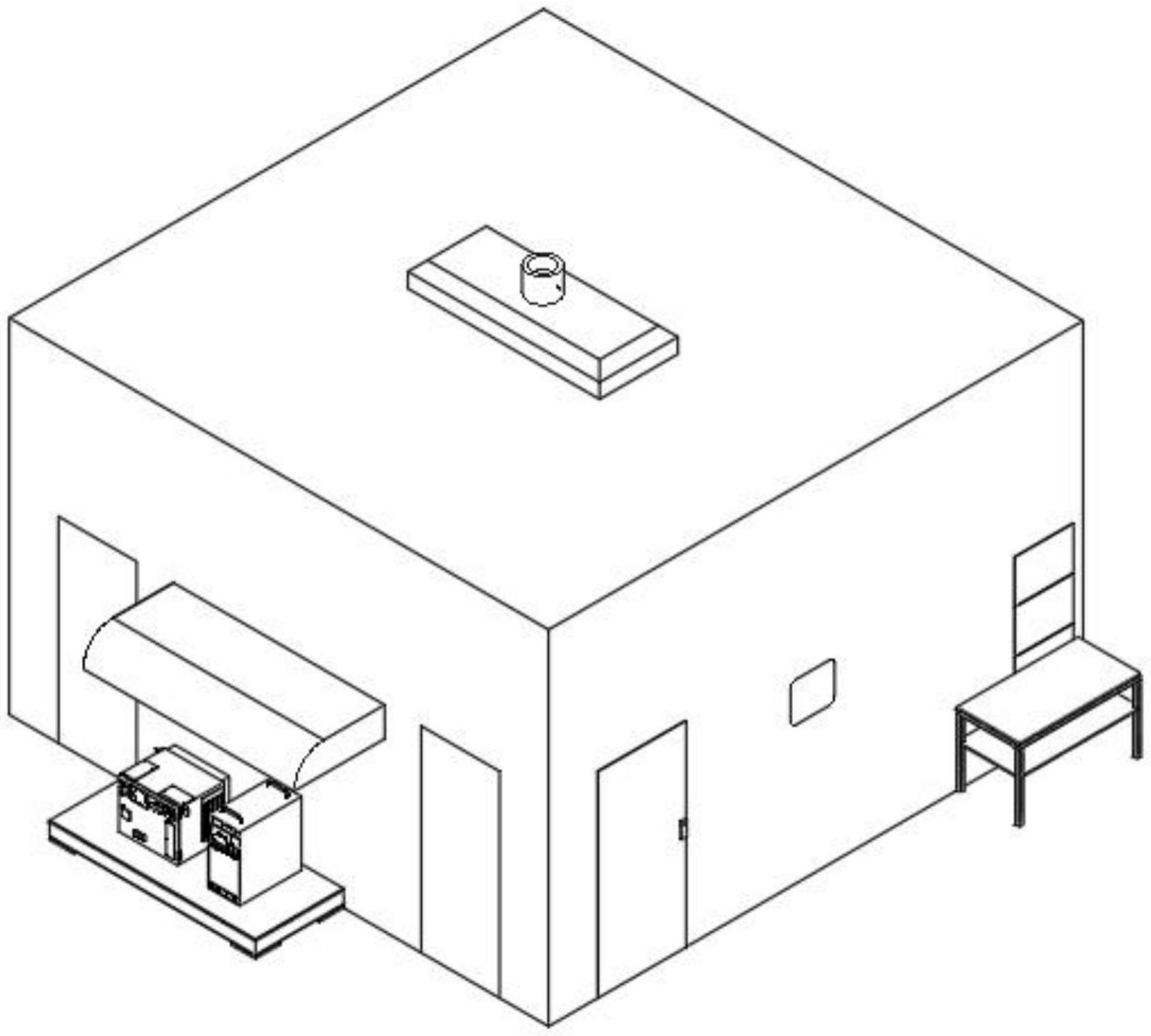
2、本实用新型是通过如下技术方案实现的:一种端盖焊接机器人工作站,包括焊房、焊接系统、物料台、底板、工装、变位机、焊接组件、搬运组件,所述焊房固定在地面上,所述焊接系统安装在所述焊房外部,所述物料台固定在焊房两侧,所述底板固定在地面上,所述变位机固定在底板上,所述工装安装在所述变位机上,所述焊接组件固定在工装的一侧,所述搬运组件固定在工装的另一侧。所述变位机包括主动轴端箱体、防护罩壳a、主动轴模块、从动轴模块、从动轴端箱体、气源处理二联件、防护罩壳b,所述主动轴端箱体、从动轴端箱体固定在底板上,所述防护罩壳a安装在主动轴端箱体上,所述主动轴模块安装在主动轴端箱体上,所述防护罩壳b安装在从动轴端箱体上,所述从动轴模块安装在从轴端箱体上,所述气源处理二联件安装在所述防护罩壳b上。变位机包括底座、变位机、驱动组件,所述底座固定在地面上,所述驱动组件安装在所述底座上,所述翻转变位机安装在所述驱动组件上。所述焊接组件包括机器人底座a、焊接机器人a、清枪器,所述机器人底座a固定在底板上,所述清枪器固定在机器人底座a的一侧,所述焊接机器人安装在机器人底座a上。所述搬运组件包括机器人b、搬运机器人、夹紧机构、agv,所述机器人底座b固定在底面上,所述搬运机器人安装在机器人底座b上,所述夹紧机构安装在搬运机器人末端上,所述agv放置在机器人底座b的一侧。所述夹紧机构包括夹具座a、导轨板a、直线导轨滑块a、直线导轨a、气缸、齿轮固定板、圆柱齿条、连接座、抓手底座、直线导轨b、直线导轨滑块b、导轨板b、夹具座b,所述气缸一端固定在抓手底座一侧,另一端固定在导轨板b一侧,所述连接座固定在抓手底座一侧,所述直线导轨a、直线导轨b、齿轮固定板固定在抓手底座另一侧,所述圆柱齿条安装在齿轮固定板孔中,所述直线导轨滑块a安装在直线导轨a上,所述导轨板a固定在直线导轨滑块a上,所述夹具座a安装在导轨板a上,所述直线导轨滑块b安装在直线导轨b上,所述导轨板b固定在直线导轨滑块b上,所述夹具座b安装在导轨板b上。
3、本实用新型的有益效果为:该一种端盖焊接机器人工作站,根据工件配置好相对应焊接程序,即可自动完成整个工件的有效焊接,替代了原有的人工焊接与搬运,减小人工劳动,维护方便快捷,结构稳定可靠,实现工厂的高度自动化。
技术特征:
1.一种端盖焊接机器人工作站,其特征在于:包括焊房、焊接系统、物料台、底板、工装、变位机、焊接组件、搬运组件,所述焊房固定在地面上,所述焊接系统安装在所述焊房外部,所述物料台固定在焊房两侧,所述底板固定在地面上,所述变位机固定在底板上,所述工装安装在所述变位机上,所述焊接组件固定在工装的一侧,所述搬运组件固定在工装的另一侧。
2.根据权利要求1所述的一种端盖焊接机器人工作站,其特征在于:所述变位机包括主动轴端箱体、防护罩壳a、主动轴模块、从动轴模块、从动轴端箱体、气源处理二联件、防护罩壳b、所述主动轴端箱体,从动轴端箱体固定在底板上,所述防护罩壳a安装在主动轴端箱体上,所述主动轴模块安装在主动轴端箱体上,所述防护罩壳b安装在从动轴端箱体上,所述从动轴模块安装在从轴端箱体上,所述气源处理二联件安装在所述防护罩壳b上。
3.根据权利要求1所述的一种端盖焊接机器人工作站,其特征在于:所述焊接组件包括机器人底座a、焊接机器人a、清枪器,所述机器人底座a固定在底板上,所述清枪器固定在机器人底座a的一侧,所述焊接机器人安装在机器人底座a上。
4.根据权利要求1所述的一种端盖焊接机器人工作站,其特征在于:所述搬运组件包括机器人b、搬运机器人、夹紧机构、agv,所述机器人底座b固定在底面上,所述搬运机器人安装在机器人底座b上,所述夹紧机构安装在搬运机器人末端上,所述agv放置在机器人底座b的一侧。
5.根据权利要求4所述的一种端盖焊接机器人工作站,其特征在于:所述夹紧机构包括夹具座a、导轨板a、直线导轨滑块a、直线导轨a、气缸、齿轮固定板、圆柱齿条、连接座、抓手底座、直线导轨b、直线导轨滑块b、导轨板b、夹具座b,所述气缸一端固定在抓手底座一侧,另一端固定在导轨板b一侧,所述连接座固定在抓手底座一侧,所述直线导轨a、直线导轨b、齿轮固定板固定在抓手底座另一侧,所述圆柱齿条安装在齿轮固定板孔中,所述直线导轨滑块a安装在直线导轨a上,所述导轨板a固定在直线导轨滑块a上,所述夹具座a安装在导轨板a上,所述直线导轨滑块b安装在直线导轨b上,所述导轨板b固定在直线导轨滑块b上,所述夹具座b安装在导轨板b上。
技术总结
本技术涉及一种端盖焊接机器人工作站,包括焊房、焊接系统、物料台、底板、工装、变位机、焊接组件、搬运组件,所述焊房固定在地面上,所述焊接系统安装在焊房外部,所述物料台固定在焊房两侧,所述底板固定在地面上,所述变位机固定在底板上,所述工装安装在所述变位机上,所述焊接组件固定在工装的一侧,所述搬运组件固定在工装的另一侧。本技术替代了原有的人工焊接,在焊接机器人工作前,工装夹具上的夹紧定位单元对待焊接的工件进行定位装夹,当一件工件焊接完成后,搬运机器人将端盖从工装上夹取搬运至AGV上,减少人工劳动,实现自动一体化,结构简洁稳定可靠高效,节约成本,大大提高了整体的加工效率。
技术研发人员:王威,吴双,丁志忠,黄运,王豪,吴虹
受保护的技术使用者:江苏长江智能制造研究院有限责任公司
技术研发日:20230530
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!