一种新型焊接平台的制作方法
本技术涉及焊接的,特别是涉及一种新型焊接平台。
背景技术:
1、焊接也称作熔接或者镕接,焊接是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术;现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等,除了在工厂中使用外,焊接还可以在多种环境下进行,如野外、水下和太空,无论在何处,焊接都可能给操作者带来危险,所以在进行焊接时必须采取适当的防护措施,焊接给人体可能造成的伤害包括烧伤、触电、视力损害、吸入有毒气体、紫外线照射过度等。对于目前的焊接多采用人工焊接,这样不仅占用了大量的人工成本,焊接效率低,焊接质量差,而且由于人工焊接,在焊接过程中常伴有危险事故产生,给焊接工人带来了一定的人身危险;另外,现有技术中存在焊接平台不能根据焊接需求随意移动的问题。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种能根据焊接需求随意移动调节位置的的新型焊接平台。
2、为实现上述目的,本实用新型是采用下述技术方案实现的:
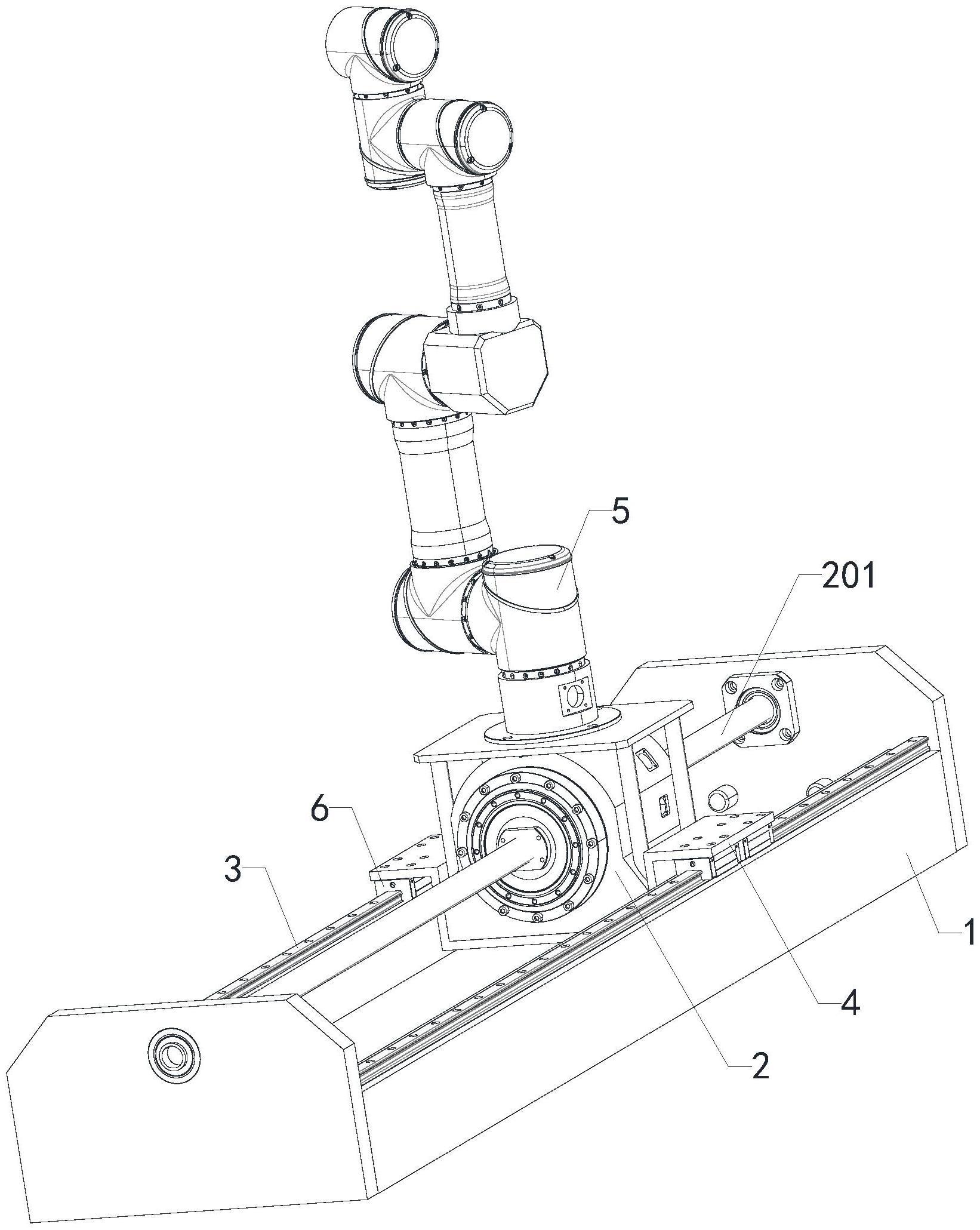
3、本实用新型的一种新型焊接平台,包括基座、滑座、滑轨、滑台和焊接机器人,所述基座的两侧对称设置两条直线型滑轨,两条所述滑轨的上侧分别滑动设置有滑块,所述滑台跨接在两个滑块之间,滑台与滑座固定连接,滑座用于驱动滑台沿滑轨方向滑动,所述滑台的上端连接焊接机器人。
4、一种可能的技术方案中,所述滑座包括丝杠、螺母座、力矩电机、减速机、刹车片、主轴和外壳,所述外壳与所述滑台固定连接,外壳为筒形,外壳的内侧贯穿设有中空的主轴,所述外壳和主轴之间安装有力矩电机,所述力矩电机与主轴套设固定,所述外壳和主轴之间通过轴承一连接;主轴位于所述外壳的外侧套设连接减速机,减速机与活动套设于主轴内侧的螺母座固定连接,所述螺母座的内侧螺纹连接丝杠,所述丝杠贯穿于主轴的内侧且两端分别与所述基座转动连接;刹车片套设于主轴的外侧,用于对主轴进行刹车。
5、一种可能的技术方案中,所述主轴的外侧还通过轴承二套设连接有固定座,固定座与外壳固定连接,固定座的内侧安装有编码器。
6、一种可能的技术方案中,所述主轴偏离所述减速机的一端外侧设置有环形的盖板,所述盖板通过所述固定座与所述外壳连接,所述盖板的内侧套设于所述丝杠的外侧。
7、一种可能的技术方案中,所述外壳与所述减速机之间、所述外壳与所述固定座之间、所述固定座与所述盖板之间以及所述盖板与所述丝杠之间均设置有密封圈,所述丝杠位于盖板的外侧套设有垫盖,垫盖与所述盖板连接并将其间的密封圈压紧。
8、一种可能的技术方案中,所述基座位于所述滑座的移动方向的内侧两端分别设置有缓冲器。
9、一种可能的技术方案中,所述焊接机器人设置有七轴机械手。
10、与现有技术相比本实用新型的有益效果为:本实用新型在焊接使用过程中,可根据焊接位置和角度需求,通过滑座驱动滑台沿滑轨方向滑动,滑台带动焊接机器人位置平移的基础上,焊接机器人可根据焊接动作需要,灵活调节操作角度,实现焊接位置和角度的自动化调整;本实用新型装置不需要人工焊接操作,不会对人体造成烧伤、触电、视力损害、吸入有毒气体、紫外线照射过度等伤害,降低了焊接操作者的人身风险,同时提高了焊接效率,有利于焊接质量的标准化,减轻了劳动负荷,节省了人力成本,采用滑座结合焊接机器人完成焊接位置调整和焊接操作,实现了焊接作业的自动化升级,符合时代的发展趋势,适合规模化推广应用。
技术特征:
1.一种新型焊接平台,其特征在于,包括基座(1)、滑座(2)、滑轨(3)、滑台(4)和焊接机器人(5),所述基座(1)的两侧对称设置两条直线型滑轨(3),两条所述滑轨(3)的上侧分别滑动设置有滑块(6),所述滑台(4)跨接在两个滑块(6)之间,滑台(4)与滑座(2)固定连接,滑座(2)用于驱动滑台(4)沿滑轨(3)方向滑动,所述滑台(4)的上端连接焊接机器人(5)。
2.如权利要求1所述的新型焊接平台,其特征在于,所述滑座(2)包括丝杠(201)、螺母座(202)、力矩电机(203)、减速机(204)、刹车片(205)、主轴(206)和外壳(207),所述外壳(207)与所述滑台(4)固定连接,外壳(207)为筒形,外壳(207)的内侧贯穿设有中空的主轴(206),所述外壳(207)和主轴(206)之间安装有力矩电机(203),所述力矩电机(203)与主轴(206)套设固定,所述外壳(207)和主轴(206)之间通过轴承一(208)连接;主轴(206)位于所述外壳(207)的外侧套设连接减速机(204),减速机(204)与活动套设于主轴(206)内侧的螺母座(202)固定连接,所述螺母座(202)的内侧螺纹连接丝杠(201),所述丝杠(201)贯穿于主轴(206)的内侧且两端分别与所述基座(1)转动连接;刹车片(205)套设于主轴(206)的外侧,用于对主轴(206)进行刹车。
3.如权利要求2所述的新型焊接平台,其特征在于,所述主轴(206)的外侧还通过轴承二(209)套设连接有固定座(210),固定座(210)与外壳(207)固定连接,固定座(210)的内侧安装有编码器(211)。
4.如权利要求3所述的新型焊接平台,其特征在于,所述主轴(206)偏离所述减速机(204)的一端外侧设置有环形的盖板(212),所述盖板(212)通过所述固定座(210)与所述外壳(207)连接,所述盖板(212)的内侧套设于所述丝杠(201)的外侧。
5.如权利要求4所述的新型焊接平台,其特征在于,所述外壳(207)与所述减速机(204)之间、所述外壳(207)与所述固定座(210)之间、所述固定座(210)与所述盖板(212)之间以及所述盖板(212)与所述丝杠(201)之间均设置有密封圈(213),所述丝杠(201)位于盖板(212)的外侧套设有垫盖(214),垫盖(214)与所述盖板(212)连接并将其间的密封圈(213)压紧。
6.如权利要求5所述的新型焊接平台,其特征在于,所述基座(1)位于所述滑座(2)的移动方向的内侧两端分别设置有缓冲器(11)。
7.如权利要求6所述的新型焊接平台,其特征在于,所述焊接机器人(5)设置有七轴机械手。
技术总结
本技术涉及焊接的技术领域,特别是涉及一种新型焊接平台,其能根据焊接需求随意移动调节位置,包括基座、滑座、滑轨、滑台和焊接机器人,基座的两侧对称设置两条直线型滑轨,两条滑轨的上侧分别滑动设置有滑块,滑台跨接在两个滑块之间,滑台与滑座固定连接,滑座用于驱动滑台沿滑轨方向滑动,滑台的上端连接焊接机器人,通过滑座驱动滑台沿滑轨方向滑动,滑台带动焊接机器人位置平移的基础上,焊接机器人可根据焊接动作需要,灵活调节操作角度,实现焊接位置和角度的自动化调整,不需要人工焊接操作,降低了焊接操作者的人身风险,同时提高了焊接效率,有利于焊接质量的标准化,减轻了劳动负荷。
技术研发人员:吕子晨,牛怀新,刘帅,王策
受保护的技术使用者:北京慧摩森电子系统技术有限公司
技术研发日:20230619
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!