一种龙门式双机三轴焊接工作站的制作方法
本技术涉及焊接,具体为一种龙门式双机三轴焊接工作站。
背景技术:
1、工件焊接时,通过工位上的夹具对工件进行固定,再通过焊接机器人对工位上的工件进行焊接,传统的三轴焊接工作站在对工件焊接时,需要将工件固定在夹具上再进行焊接,焊接完成后,再取下工件,之后重复进行该操作,整个操作过程中,人工对工件固定和拆卸的过程中,没有工件进行焊接,焊接机器人处于停机状态,焊接机器人的工作效率受到工件拆卸和固定工序的影响,降低了设备的工作效率。
技术实现思路
1、针对现有技术存在的不足,本实用新型提供了一种龙门式双机三轴焊接工作站,用于解决人工对工件固定和拆卸的过程中、因没有工件进行焊接导致焊接机器人处于停机状态、降低了设备的工作效率的问题。
2、为解决上述技术问题,本实用新型提供如下技术方案:
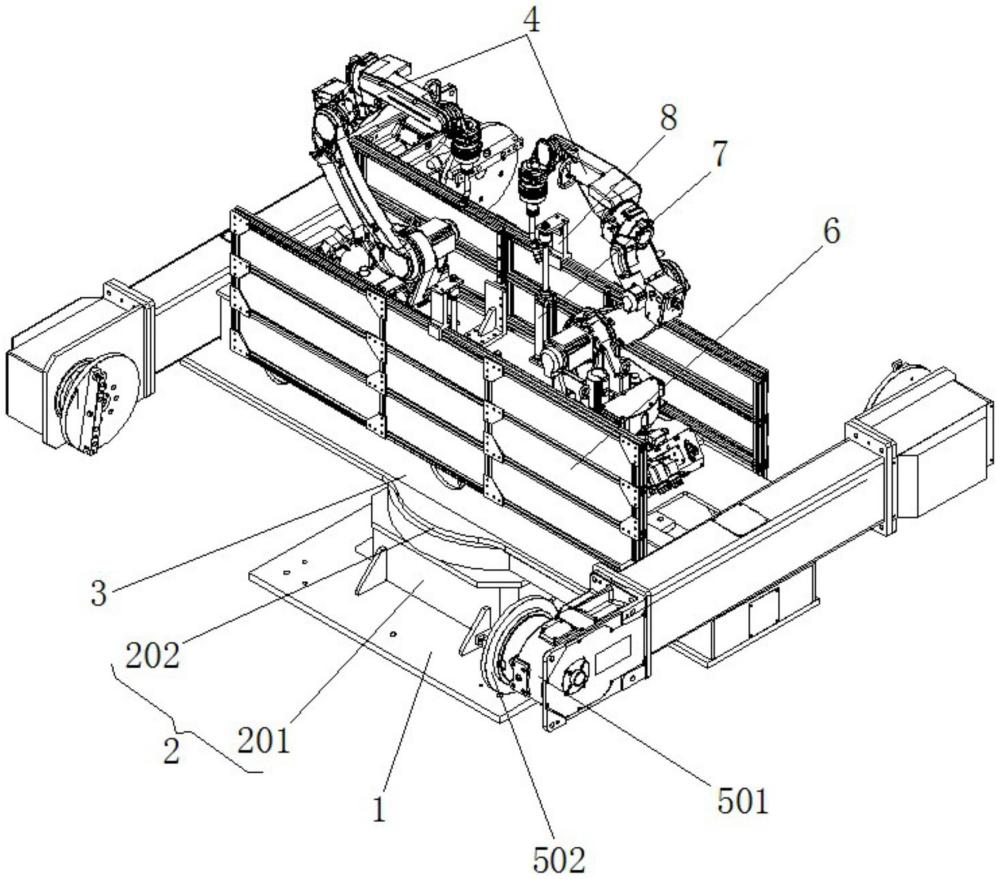
3、一种龙门式双机三轴焊接工作站,包括底座,所述底座上方中心位置处设置有水平回转台,所述水平回转台上设置有工字型旋转臂,所述工字型旋转臂上设置有两台焊接机器人,所述工字型旋转臂包括水平设置的横梁以及水平垂直设置在横梁两端的横臂,所述横臂的两端均设置有竖直回转台。
4、优选的,所述水平回转台包括竖直设置在底座上的基座、与基座转动连接的转动座、设置在基座内的第一减速电机,所述第一减速电机的输出轴上设置有第一齿轮,所述转动座的下表面中心位置处设置有转动连接在基座内的第二齿轮,且第一齿轮和第二齿轮相啮合。
5、优选的,所述竖直回转台包括固定在横臂上的第二减速电机,所述第二减速电机的输出轴上水平设置有工件转盘,所述工件转盘背离第二减速电机的侧面设置有工件夹具。
6、优选的,所述横梁上表面设置有位于焊接机器人两侧的护栏板。
7、优选的,所述横梁的上表面设置有伸缩杆,所述伸缩杆的伸缩端上设置有卡合在护栏板上端的卡扣。
8、与现有技术相比,本实用新型具备以下有益效果:
9、本实用新型通过设置工字型旋转臂,工字型旋转臂的工字型结构上四组竖直回转台的存在,两个焊接机器人能够对两个竖直回转台上的工件进行焊接,另一侧工字型旋转臂上的竖直回转台上进行工件的夹持,这样双工位的设置便于多工件同时焊接加工,可以一个工位焊接加工一个工位装夹工件,提高了焊接工作效率,解决了人工对工件固定和拆卸的过程中、因没有工件进行焊接导致焊接机器人处于停机状态、降低了设备的工作效率的问题。
技术特征:
1.一种龙门式双机三轴焊接工作站,包括底座(1),其特征在于:所述底座(1)上方中心位置处设置有水平回转台(2),所述水平回转台(2)上设置有工字型旋转臂(3),所述工字型旋转臂(3)上设置有两台焊接机器人(4),所述工字型旋转臂(3)包括水平设置的横梁(301)以及水平垂直设置在横梁(301)两端的横臂(302),所述横臂(302)的两端均设置有竖直回转台(5);所述横梁(301)上表面设置有位于焊接机器人(4)两侧的护栏板(6),所述横梁(301)的上表面竖直设置有伸缩杆(7),所述伸缩杆(7)的伸缩端上设置有卡合在护栏板(6)上端的卡扣(8)。
2.根据权利要求1所述的龙门式双机三轴焊接工作站,其特征在于:所述水平回转台(2)包括竖直设置在底座(1)上的基座(201)、与基座(201)转动连接的转动座(202)、设置在基座(201)内的第一减速电机(203),所述第一减速电机(203)的输出轴上设置有第一齿轮(204),所述转动座(202)的下表面中心位置处设置有转动连接在基座(201)内的第二齿轮(205),且第一齿轮(204)和第二齿轮(205)相啮合。
3.根据权利要求1所述的龙门式双机三轴焊接工作站,其特征在于:所述竖直回转台(5)包括固定在横臂(302)上的第二减速电机(501),所述第二减速电机(501)的输出轴上水平设置有工件转盘(502),所述工件转盘(502)背离第二减速电机(501)的侧面设置有工件夹具(503)。
技术总结
本技术公开了一种龙门式双机三轴焊接工作站,包括底座,所述底座上方中心位置处设置有水平回转台,所述水平回转台上设置有工字型旋转臂,所述工字型旋转臂上设置有焊接机器人,所述工字型旋转臂包括水平设置的横梁以及水平垂直设置在横梁两端的横臂。本技术中两个焊接机器人能够对两个竖直回转台上的工件进行焊接,另一侧工字型旋转臂上的竖直回转台上进行工件的夹持,这样双工位的设置便于多工件同时焊接加工,可以一个工位焊接加工一个工位装夹工件,提高了焊接工作效率,解决了人工对工件固定和拆卸的过程中、因没有工件进行焊接导致焊接机器人处于停机状态、降低了设备的工作效率的问题。
技术研发人员:彭益静
受保护的技术使用者:安徽润汉智能装备有限公司
技术研发日:20230619
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!