一种五组三轴机器人的弯曲生产线的制作方法
本技术涉及棒材钢筋剪切、弯曲领域,具体涉及可实现钢筋的自动送料、定尺剪切、弯曲、收集的流水线加工。
背景技术:
1、国内目前传统的钢筋剪切、弯曲加工还未达到全自动化流水作业。钢筋剪切后需要人工周转至弯曲工位进行弯曲加工,弯曲成型后再由人工将钢筋取下,此加工过程至少需要3名操作工人进行施工,其占地面积较大,施工强度偏高,人员投入较多,安全隐患风险增加,其缺点较为突出。
2、因目前两种钢筋的剪切、弯曲加工还不能实现两工序联动整合,不能实现自动化流水作业,依然存在技术革新的空间。针对此领域特性,研发一款价格适中,结构紧凑的“一种五组三轴机器人的剪切弯曲生产线”是很有必要的,其意义是长远的,可改变此行业的加工理念,实现自动化作业,向标准化、自动化、智能化、安全化发展,推动此领域的加工升级,迎合现代化发展的需求。
技术实现思路
1、本实用新型的目的在于提供一种五组三轴机器人的弯曲生产线,旨在解决上述背景技术中提出的问题,本方案替代了传统多工位加工的过程,实现了自动化作业,降低了工作强度,提升了加工精度,增加的经济效益。此生产线应用于棒材钢筋剪切、弯曲领域。
2、为实现上述目的,本实用新型提供如下技术方案:
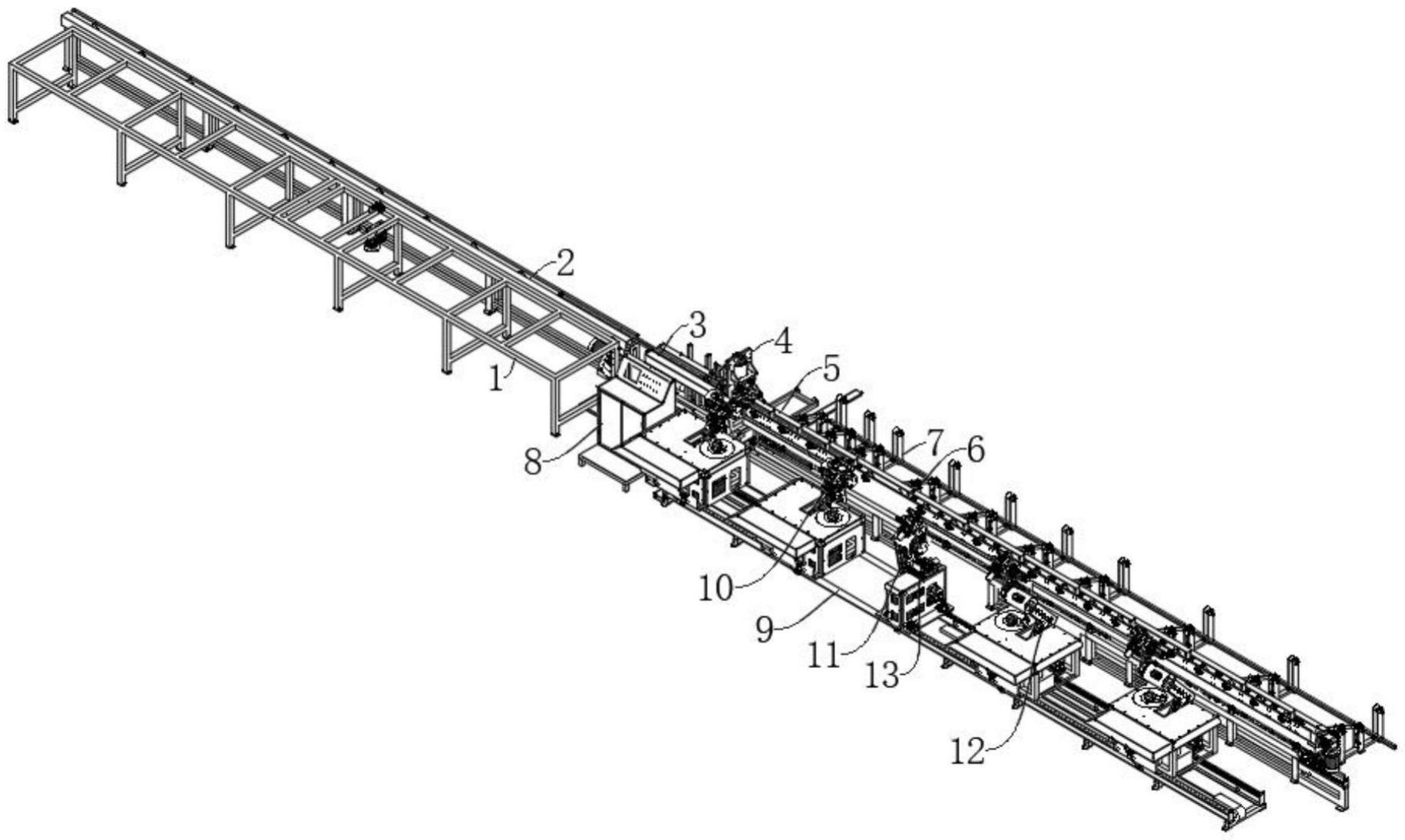
3、一种五组三轴机器人的弯曲生产线,包括:原料放置架,所述原料放置架一侧的表面安装有进料座,所述进料座一侧的表面安装有尾料翻板,所述尾料翻板的表面安装有切断机头,所述尾料翻板的表面且位于切断机头的一侧安装有出料槽,所述尾料翻板的表面安装有定尺挡板,所述出料槽的表面安装有剪切收料仓,所述尾料翻板的一侧安装有控制柜,所述出料槽的表面安装有底座,所述底座的表面滑动连接有两个一号机器人,所述底座的表面且位于一号机器人的一侧安装有二号机器人,所述二号机器人的表面安装有中间夹紧组件,所述底座的表面其位于二号机器人的一侧滑动连接有两个三号机器人。
4、作为本实用新型的一种优选方案,所述原料放置架用于对原材料进行放置和支撑,所述进料座用于对尾料翻板进行支撑,所述尾料翻板用于对钢筋剩余尾料进行收集。
5、作为本实用新型的一种优选方案,所述切断机头用于对钢筋进行执行剪切。
6、作为本实用新型的一种优选方案,所述出料槽用于对底座和剪切收料仓进行支撑。
7、作为本实用新型的一种优选方案,所述定尺挡板用于对钢筋剪切长度进行定位。
8、作为本实用新型的一种优选方案,所述剪切收料仓用于对单独剪切下料的材料进行收料储存。
9、作为本实用新型的一种优选方案,所述控制柜用于对该弯曲生产线上的多个构件进行控制。
10、作为本实用新型的一种优选方案,所述底座用于对一号机器人、二号机器人和三号机器人进行支撑。
11、作为本实用新型的一种优选方案,所述一号机器人、二号机器人和三号机器人用于将切断后的钢筋周转并进行弯曲,弯曲完成后将钢筋周转至成品位置。
12、作为本实用新型的一种优选方案,所述中间夹紧组件用于将待弯曲钢筋进行夹紧。
13、与现有技术相比,本实用新型的有益效果是:
14、本方案将目前传统的2个工序加工整合起来且通过一号机器人、二号机器人和三号机器人的配合使用,实现剪切至弯曲的工序周转,实现自动化流水作业,突破了传统的加工理念,有效解决了此领域当前的技术难点,且效果良好,实用性强,可改变此行业的传统加工理念,实现自动化作业,向标准化、自动化、智能化、安全化发展,推动此领域的加工升级,迎合现代化发展的需求。
技术特征:
1.一种五组三轴机器人的弯曲生产线,其特征在于,包括:原料放置架(1),所述原料放置架(1)一侧的表面安装有进料座(2),所述进料座(2)一侧的表面安装有尾料翻板(3),所述尾料翻板(3)的表面安装有切断机头(4),所述尾料翻板(3)的表面且位于切断机头(4)的一侧安装有出料槽(5),所述尾料翻板(3)的表面安装有定尺挡板(6),所述出料槽(5)的表面安装有剪切收料仓(7),所述尾料翻板(3)的一侧安装有控制柜(8),所述出料槽(5)的表面安装有底座(9),所述底座(9)的表面滑动连接有两个一号机器人(10),所述底座(9)的表面且位于一号机器人(10)的一侧安装有二号机器人(11),所述二号机器人(11)的表面安装有中间夹紧组件(13),所述底座(9)的表面其位于二号机器人(11)的一侧滑动连接有两个三号机器人(12)。
2.根据权利要求1所述的一种五组三轴机器人的弯曲生产线,其特征在于,所述原料放置架(1)用于对原材料进行放置和支撑,所述进料座(2)用于对尾料翻板(3)进行支撑,所述尾料翻板(3)用于对钢筋剩余尾料进行收集。
3.根据权利要求2所述的一种五组三轴机器人的弯曲生产线,其特征在于,所述切断机头(4)用于对钢筋进行执行剪切。
4.根据权利要求3所述的一种五组三轴机器人的弯曲生产线,其特征在于,所述出料槽(5)用于对底座(9)和剪切收料仓(7)进行支撑。
5.根据权利要求4所述的一种五组三轴机器人的弯曲生产线,其特征在于,所述定尺挡板(6)用于对钢筋剪切长度进行定位。
6.根据权利要求5所述的一种五组三轴机器人的弯曲生产线,其特征在于,所述剪切收料仓(7)用于对单独剪切下料的材料进行收料储存。
7.根据权利要求6所述的一种五组三轴机器人的弯曲生产线,其特征在于,所述控制柜(8)用于对该弯曲生产线上的多个构件进行控制。
8.根据权利要求7所述的一种五组三轴机器人的弯曲生产线,其特征在于,所述底座(9)用于对一号机器人(10)、二号机器人(11)和三号机器人(12)进行支撑。
9.根据权利要求8所述的一种五组三轴机器人的弯曲生产线,其特征在于,所述一号机器人(10)、二号机器人(11)和三号机器人(12)用于将切断后的钢筋周转并进行弯曲,弯曲完成后将钢筋周转至成品位置。
10.根据权利要求9所述的一种五组三轴机器人的弯曲生产线,其特征在于,所述中间夹紧组件(13)用于将待弯曲钢筋进行夹紧。
技术总结
本技术提供一种五组三轴机器人的弯曲生产线,属于棒材钢筋剪切、弯曲技术领域,包括:原料放置架,所述原料放置架一侧的表面安装有进料座,所述进料座一侧的表面安装有尾料翻板,所述尾料翻板的表面安装有切断机头,所述尾料翻板的表面且位于切断机头的一侧安装有出料槽,所述尾料翻板的表面安装有定尺挡板,所述出料槽的表面安装有剪切收料仓,所述尾料翻板的一侧安装有控制柜,所述出料槽的表面安装有底座,所述底座的表面滑动连接有两个一号机器人。本方案替代了传统多工位加工的过程,实现了自动化作业,降低了工作强度,提升了加工精度,增加的经济效益。此生产线应用于棒材钢筋剪切、弯曲领域。
技术研发人员:姜勇,寇鹏举,张新波,张刚鹏,李向宁,王建保,魏高
受保护的技术使用者:陕西勇拓机械科技有限公司
技术研发日:20230628
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!