一种端子插入骨架内的插接装置的制作方法
本技术涉及自动化,尤其是一种端子插入骨架内的插接装置。
背景技术:
1、骨架为条状结构,骨架设有若干插接孔,端子为导电结构,骨架上需要插入若干端子,在插接过程中,端子需要精确的插入骨架内,目前是通过人工方法,人工插接,插接效率低,插接不难度大,劳动强度比较大。
技术实现思路
1、本实用新型的目的是解决现有技术的不足,提供一种端子插入骨架内的插接装置。
2、本实用新型的一种技术方案:
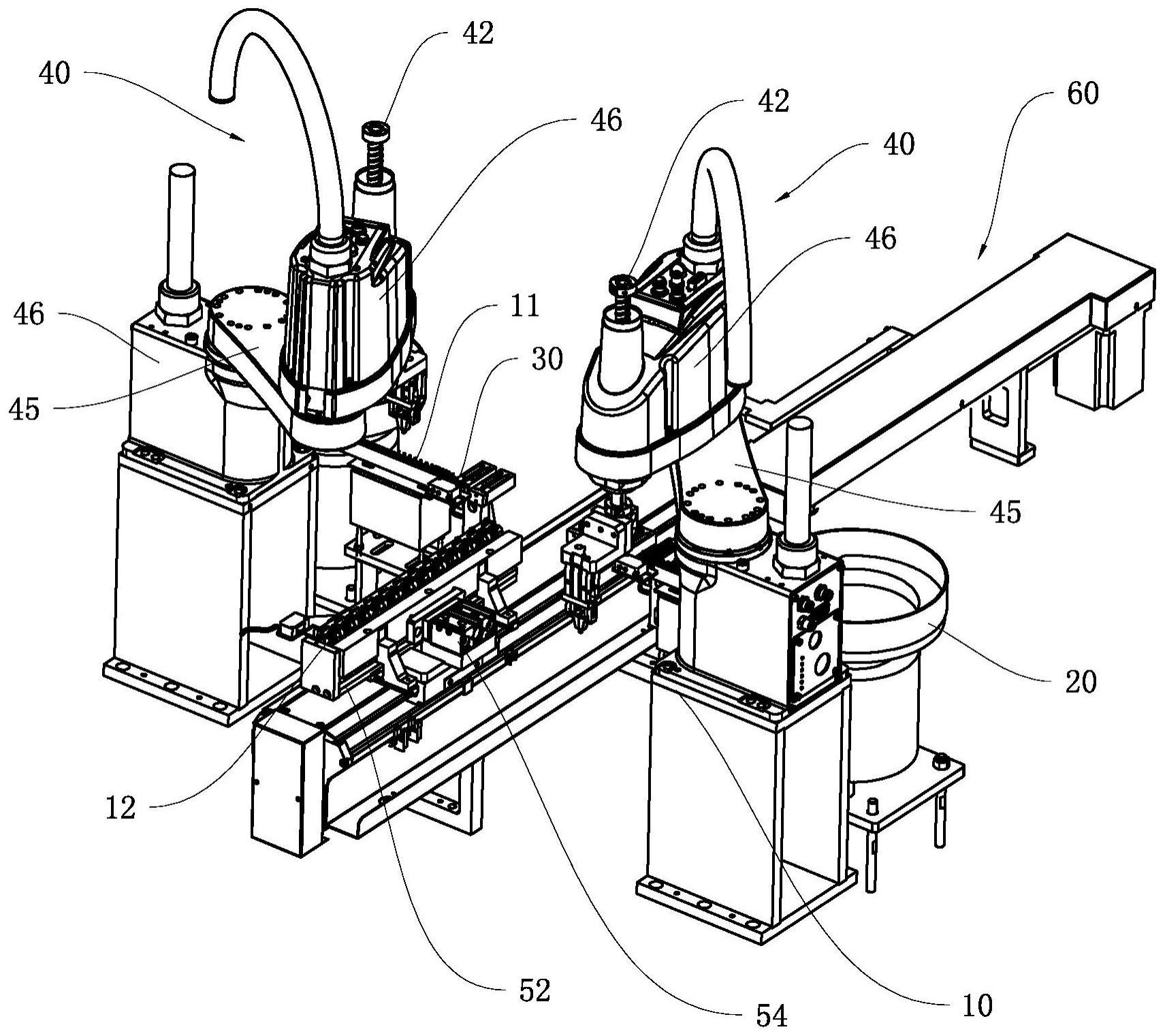
3、一种端子插入骨架内的插接装置,包括机架,振动盘,端子固定槽,用于抓取端子并将端子插入骨架内的机械手,用于固定骨架的骨架固定槽,以及驱动骨架沿着骨架固定槽滑动的骨架驱动结构,所述机械手与机架转动连接,所述振动盘与端子固定槽的一端连接,所述机械手于端子固定槽与骨架固定槽之间来回转动,所述机械手抓取端子固定槽内的端子后插入骨架内。
4、一种优选方案是所述机械手包括用于抓取端子的夹爪,升降杆,第一转动轴,第二转动轴,驱动杆和转动座,所述夹爪通过升降杆与转动座的底部连接,驱动杆的一端通过第一转动轴与机架转动连接,另一端通过第二转动轴与所述转动座转动连接,所述驱动杆驱动转动座和夹爪绕第二转动轴转动。
5、一种优选方案是所述骨架驱动结构包括拨爪,x轴气缸和固定横杆,所述拨爪与固定横杆滑动连接,所述x轴气缸驱动拨爪沿着固定横杆来回滑动,所述拨爪位于骨架固定槽的正上方。
6、一种优选方案是所述机架上设有滑轨,所述骨架固定槽与滑轨滑动连接,所述端子插入骨架内的插接装置还包括驱动骨架固定槽沿滑轨滑动的动力源。
7、一种优选方案是所述骨架固定槽包括第一固定块,支撑块,第一活动块和推动气缸;所述支撑块设置在第一固定块底部且与第一固定块固定连接,所述第一活动块与第一固定块平行设置,所述第一活动块与第一固定块之间形成夹槽,所述推动气缸推动第一活动块靠近或者远离第一固定块。
8、一种优选方案是所述端子固定槽设有定位槽,所述定位槽的一侧设有端子感应器。
9、一种优选方案是所述振动盘和机械手的数量分别为两个,其中一个振动盘和机械手位于骨架固定槽的一侧,另一振动盘和机械手位于骨架固定槽的另一侧。
10、综合上述技术方案,本实用新型的有益效果:振动盘内装有端子,骨架固定槽内放置有骨架,振动盘振动时,端子沿着振动盘流动至端子固定槽内,当端子固定槽内排布有端子之后,机械手抓取端子,机械手于端子固定槽与骨架固定槽之间来回转动,机械手将抓取端子插入至骨架内,完成端子自动插入骨架内;端子插入骨架内之后,机械手转动至靠近端子固定槽,机械手抓取下一端子,插接效率高,无需人工插接。
11、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:
1.一种端子插入骨架内的插接装置,其特征在于,包括机架,振动盘,端子固定槽,用于抓取端子并将端子插入骨架内的机械手,用于固定骨架的骨架固定槽,以及驱动骨架沿着骨架固定槽滑动的骨架驱动结构,所述机械手与机架转动连接,所述振动盘与端子固定槽的一端连接,所述机械手于端子固定槽与骨架固定槽之间来回转动,所述机械手抓取端子固定槽内的端子后插入骨架内。
2.根据权利要求1所述的端子插入骨架内的插接装置,其特征在于,所述机械手包括用于抓取端子的夹爪,升降杆,第一转动轴,第二转动轴,驱动杆和转动座,所述夹爪通过升降杆与转动座的底部连接,驱动杆的一端通过第一转动轴与机架转动连接,另一端通过第二转动轴与所述转动座转动连接,所述驱动杆驱动转动座和夹爪绕第二转动轴转动。
3.根据权利要求1或2所述的端子插入骨架内的插接装置,其特征在于,所述骨架驱动结构包括拨爪,x轴气缸和固定横杆,所述拨爪与固定横杆滑动连接,所述x轴气缸驱动拨爪沿着固定横杆来回滑动,所述拨爪位于骨架固定槽的正上方。
4.根据权利要求1所述的端子插入骨架内的插接装置,其特征在于,所述机架上设有滑轨,所述骨架固定槽与滑轨滑动连接,所述端子插入骨架内的插接装置还包括驱动骨架固定槽沿滑轨滑动的动力源。
5.根据权利要求1所述的端子插入骨架内的插接装置,其特征在于,所述骨架固定槽包括第一固定块,支撑块,第一活动块和推动气缸;所述支撑块设置在第一固定块底部且与第一固定块固定连接,所述第一活动块与第一固定块平行设置,所述第一活动块与第一固定块之间形成夹槽,所述推动气缸推动第一活动块靠近或者远离第一固定块。
6.根据权利要求1所述的端子插入骨架内的插接装置,其特征在于,所述端子固定槽设有定位槽,所述定位槽的一侧设有端子感应器。
7.根据权利要求1所述的端子插入骨架内的插接装置,其特征在于,所述振动盘和机械手的数量分别为两个,其中一个振动盘和机械手位于骨架固定槽的一侧,另一振动盘和机械手位于骨架固定槽的另一侧。
技术总结
本技术公开了一种端子插入骨架内的插接装置,包括机架,振动盘,端子固定槽,机械手,骨架固定槽,以及驱动骨架沿着骨架固定槽滑动的骨架驱动结构,机械手与机架转动连接,振动盘与端子固定槽的一端连接,机械手于端子固定槽与骨架固定槽之间来回转动,机械手抓取端子固定槽内的端子后插入骨架内。它的优点是振动盘内装有端子,骨架固定槽内放置有骨架,振动盘振动时,端子沿着振动盘流动至端子固定槽内,机械手抓取端子,机械手于端子固定槽与骨架固定槽之间来回转动,机械手将抓取端子插入至骨架内,完成端子自动插入骨架内;端子插入骨架内之后,机械手转动至靠近端子固定槽,机械手抓取下一端子,插接效率高,无需人工插接。
技术研发人员:魏坤亮
受保护的技术使用者:深圳市和创机械模具有限公司
技术研发日:20230630
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!