一种具有视觉功能的机器人激光焊接工作站的制作方法
本技术涉及机器人激光焊接加工领域,具体为一种具有视觉功能的机器人激光焊接工作站。
背景技术:
1、激光焊接用高能量密度的激光束作为热源的一种高效精密焊接方法,因其焊接质量好、效率高,在汽车工业及其他相关领域得到了广泛的应用,具有良好的自动化性,有利于提高焊件加工的精度。
2、目前运用多个激光焊接的机器人组成焊接工作站,能够快速高效地完成焊接任务,其焊接机器人外侧具有很多电源线与信号线,为了更够更好的管理,会将电源线和信号线汇总为一根总线,但是,其总线由于放置在焊接机器人的外侧,所以,当焊接机器人在进行运转操作时,外侧的线缆极易与机器人的机械臂发生摩擦,存在损伤线缆的后果。
技术实现思路
1、基于此,本实用新型的目的是提供一种具有视觉功能的机器人激光焊接工作站,以解决当焊接机器人在进行运转操作时,外侧的线缆极易与机器人的机械臂发生摩擦,存在损伤线缆的技术问题。
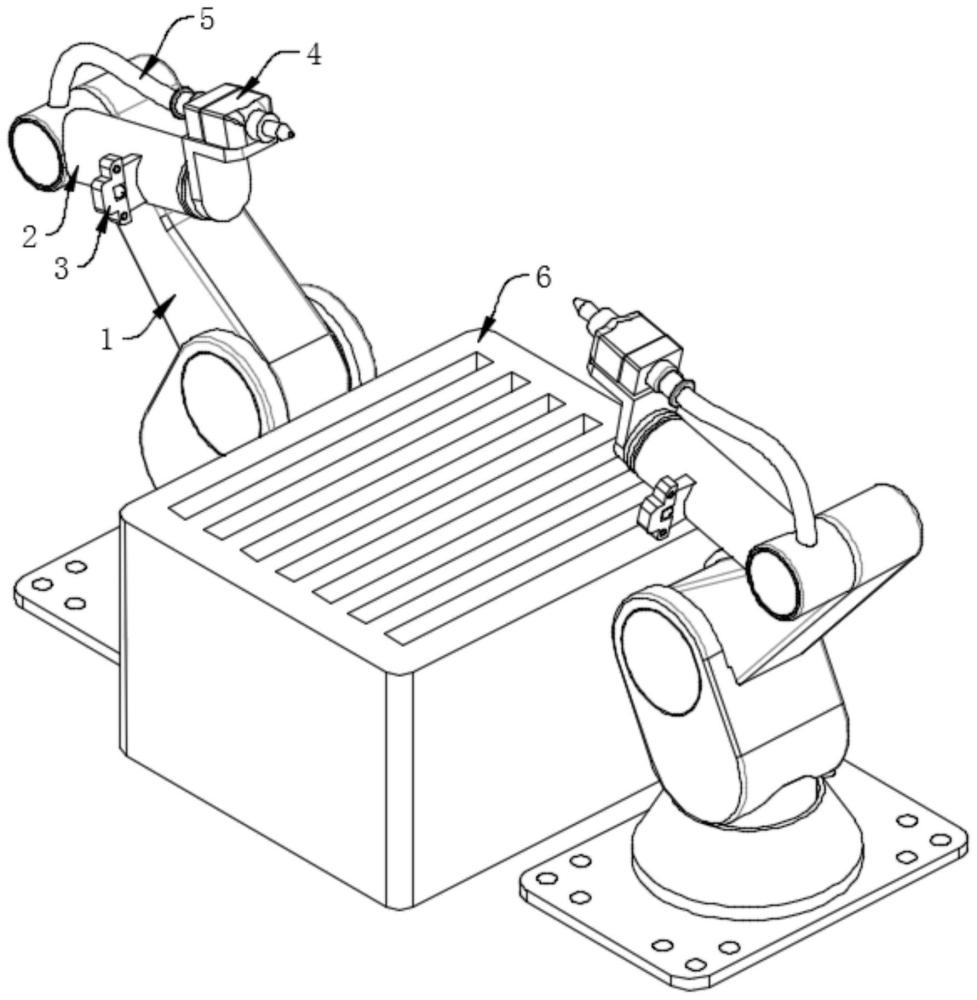
2、为实现上述目的,本实用新型提供如下技术方案:一种具有视觉功能的机器人激光焊接工作站,包括机器人主体、机器人延伸臂,所述机器人延伸臂的外侧设置有安装板,所述安装板的两侧均设置有限位机构,所述安装板的顶部设置有套筒,所述套筒的内部套设有伸缩杆,所述伸缩杆的顶部通过转轴转动连接有套环,所述套环设置有两个,两个所述套环之间设置有夹持片,所述夹持片与套环之间设置有滚珠。
3、通过采用上述技术方案,首先,利用限位机构将安装板安装固定在机器人延伸臂上,接着,通过轴承旋转两个套环,将线缆放置在两个夹持片之间,之后通过螺栓将两个套环进行固定,通过将线缆与机器人的摩擦变为夹持片通过滚珠与套环之间的滑动摩擦,有利于防止线缆与机器人的直接接触摩擦,增强对线缆的防护效果。
4、进一步的,所述机器人延伸臂的延伸端设置有焊接枪头,所述焊接枪头靠近机器人延伸臂的一侧设置有线缆。
5、通过采用上述技术方案,通过设置焊接枪头,有利于利用激光焊接对加工焊件的焊接操作,有利于提高焊件焊接的高效性,增强机器人的焊接实用性。
6、进一步的,所述夹持片设置有两个,两个所述夹持片的内壁与线缆相贴合,两个所述夹持片的两端均设置有固定环,所述固定环为橡胶材质构成。
7、通过采用上述技术方案,通过将固定环设置为橡胶结构,有利于增强夹持片与线缆的摩擦力度,有利于防止夹持片对线缆的损伤。
8、进一步的,所述套筒和伸缩杆上均设置有螺纹孔,所述螺纹孔设置有多个,多个所述螺纹孔沿伸缩杆的高度线呈等距线性排布。
9、通过采用上述技术方案,通过设置多个螺纹孔,有利于对伸缩杆的高度进行调节,有利于增强线缆定位装置的实施性。
10、进一步的,所述限位机构包括第一安装环和第二安装环,所述第一安装环通过转轴与安装板转动连接。
11、通过采用上述技术方案,通过将第一安装环通过转轴与安装板转动连接,有利于将第二安装环与安装板安装固定在机器人延伸臂上,有利于增强安装板的安装便捷性。
12、进一步的,所述第一安装环的另一端设置有限位块,所述限位块的内部开设有空腔,所述空腔的内部设置有卡片,所述第二安装环上设置有多个卡槽,多个所述卡槽呈等距线性分布。
13、通过采用上述技术方案,通过设置多个卡槽,有利于增强安装板的安装便捷性,进一步增强安装板的安装稳定性。
14、进一步的,两个所述套环通过螺栓固定连接,所述机器人延伸臂的一侧设置有扫描机,所述机器人主体设置有两个,两个所述机器人主体之间设置有放置台。
15、通过采用上述技术方案,通过设置扫描机,有利于通过扫描机,扫描放置台上焊件的位置及形状结构,有利于提高机器人激光焊接的焊接精度。
16、综上所述,本实用新型主要具有以下有益效果:
17、1、本实用新型通过套环、夹持片和滚珠,首先,利用限位机构将安装板安装固定在机器人延伸臂上,接着,通过轴承旋转两个套环,将线缆放置在两个夹持片之间,之后通过螺栓将两个套环进行固定,通过将线缆与机器人的摩擦变为夹持片通过滚珠与套环之间的滑动摩擦,有利于防止线缆与机器人的直接接触摩擦,增强对线缆的防护效果;
18、2、本实用新型通过设置第一安装环、第二安装环、限位块、卡片和卡槽,当需要将安装板固定在机器人延伸臂上时,首先,通过转轴旋转第一安装环,接着,将安装板、第二安装环与机器人延伸臂的表面相贴合,然后,旋转第一安装环,使第二安装环插入空腔的内部,随着逐渐的深入,使安装板与机器人延伸臂紧密贴合,之后将卡片与卡槽相卡合,有利于提高安装板的安装便捷性,进一步增强安装板的安装稳定性。
技术特征:
1.一种具有视觉功能的机器人激光焊接工作站,包括机器人主体(1)、机器人延伸臂(2),其特征在于:所述机器人延伸臂(2)的外侧设置有安装板(7),所述安装板(7)的两侧均设置有限位机构(8),所述安装板(7)的顶部设置有套筒(9),所述套筒(9)的内部套设有伸缩杆(10),所述伸缩杆(10)的顶部通过转轴转动连接有套环(12),所述套环(12)设置有两个,两个所述套环(12)之间设置有夹持片(13),所述夹持片(13)与套环(12)之间设置有滚珠(15)。
2.根据权利要求1所述的具有视觉功能的机器人激光焊接工作站,其特征在于:所述机器人延伸臂(2)的延伸端设置有焊接枪头(4),所述焊接枪头(4)靠近机器人延伸臂(2)的一侧设置有线缆(5)。
3.根据权利要求1所述的具有视觉功能的机器人激光焊接工作站,其特征在于:所述夹持片(13)设置有两个,两个所述夹持片(13)的内壁与线缆(5)相贴合,两个所述夹持片(13)的两端均设置有固定环(14),所述固定环(14)为橡胶材质构成。
4.根据权利要求1所述的具有视觉功能的机器人激光焊接工作站,其特征在于:所述套筒(9)和伸缩杆(10)上均设置有螺纹孔(11),所述螺纹孔(11)设置有多个,多个所述螺纹孔(11)沿伸缩杆(10)的高度线呈等距线性排布。
5.根据权利要求1所述的具有视觉功能的机器人激光焊接工作站,其特征在于:所述限位机构(8)包括第一安装环(801)和第二安装环(802),所述第一安装环(801)通过转轴与安装板(7)转动连接。
6.根据权利要求5所述的具有视觉功能的机器人激光焊接工作站,其特征在于:所述第一安装环(801)的另一端设置有限位块(803),所述限位块(803)的内部开设有空腔(804),所述空腔(804)的内部设置有卡片(806),所述第二安装环(802)上设置有多个卡槽(805),多个所述卡槽(805)呈等距线性分布。
7.根据权利要求1所述的具有视觉功能的机器人激光焊接工作站,其特征在于:两个所述套环(12)通过螺栓固定连接,所述机器人延伸臂(2)的一侧设置有扫描机(3),所述机器人主体(1)设置有两个,两个所述机器人主体(1)之间设置有放置台(6)。
技术总结
本技术公开了一种具有视觉功能的机器人激光焊接工作站,涉及机器人激光焊接加工领域。本技术包括机器人主体、机器人延伸臂,所述机器人延伸臂的外侧设置有安装板,所述安装板的两侧均设置有限位机构,所述安装板的顶部设置有套筒,所述套筒的内部套设有伸缩杆,所述伸缩杆的顶部通过转轴转动连接有套环,本技术通过套环、夹持片和滚珠,首先,利用限位机构将安装板安装固定在机器人延伸臂上,接着,通过轴承旋转两个套环,将线缆放置在两个夹持片之间,之后通过螺栓将两个套环进行固定,通过将线缆与机器人的摩擦变为夹持片通过滚珠与套环之间的滑动摩擦,有利于防止线缆与机器人的接触摩擦,增强对线缆的防护效果。
技术研发人员:谢静翔,颜志伟,吴汉城
受保护的技术使用者:福建明鑫机器人科技有限公司
技术研发日:20230703
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!