一种自动更换CNC刀具的机器人装置与末端夹爪的制作方法
本申请涉及机床的自动加工领域,尤其是涉及一种自动更换cnc刀具的机器人装置与末端夹爪。
背景技术:
1、目前自动加工领域中使用cnc机床加工是一种普遍的加工方式,cnc机床在加工时往往需要用到多种刀具,这些刀具会存放在cnc机床的刀库中以便cnc机床加工时能够自动换刀。当cnc机床刀库中的刀具磨损时,则需要人力对刀库中的刀具进行更换,随着自动化工厂的生产规模越来越普及,对生产效率和生产安全的追求也成了现在的主题,于是可以自动更换刀具的复合型机器人便应运而生。自动更换刀具的复合机器人的出现提高了刀具更换效率,促进了自动化工厂的智能制造,复合型机器人上安装有夹持刀具的夹爪,利用夹爪固定刀具后带动刀具进行移动,但是在售的刀具种类多种多样,单一的夹爪往往不能很好的适应所有的刀具,导致部分刀具无法利用机器人进行更换。
2、发明公开号cn104625134a公开了一种能夹持多种规格刀具的夹具,包括定位轴,所述的定位轴位于固定套筒中心,所述的固定套筒设有用于紧固定位轴的紧固螺钉,所述的定位轴前段设有卡位平台,卡位平台下端,定位轴两侧设有夹爪,所述的夹爪呈l型,其弯折处通过铰链与固定套筒上端的固定杆顶端连接,所述的夹爪一边位于卡位平台下端,另一边上端设有调节螺丝。夹爪往往被设计成特定的形状,只能适应少数特定尺寸和形状的刀具,遇到其它不适应的刀具时需要更换夹爪或者对夹爪进行手动调整。
3、针对上述中的相关技术,存在机器人夹爪无法适应多种类型的刀具,兼容性还有待提高的问题。
技术实现思路
1、本申请的目的是提供一种能适应多种类型刀具,兼容性更高的一种自动更换cnc刀具的机器人装置与末端夹爪。
2、为了实现上述目的,本申请采用的技术方案如下:
3、提出一种自动更换cnc刀具的机器人装置,包括:
4、无人搬运车;
5、随机治具台,承载于所述无人搬运车上,用于放置待更换的刀具;
6、机械臂,承载于所述无人搬运车上;
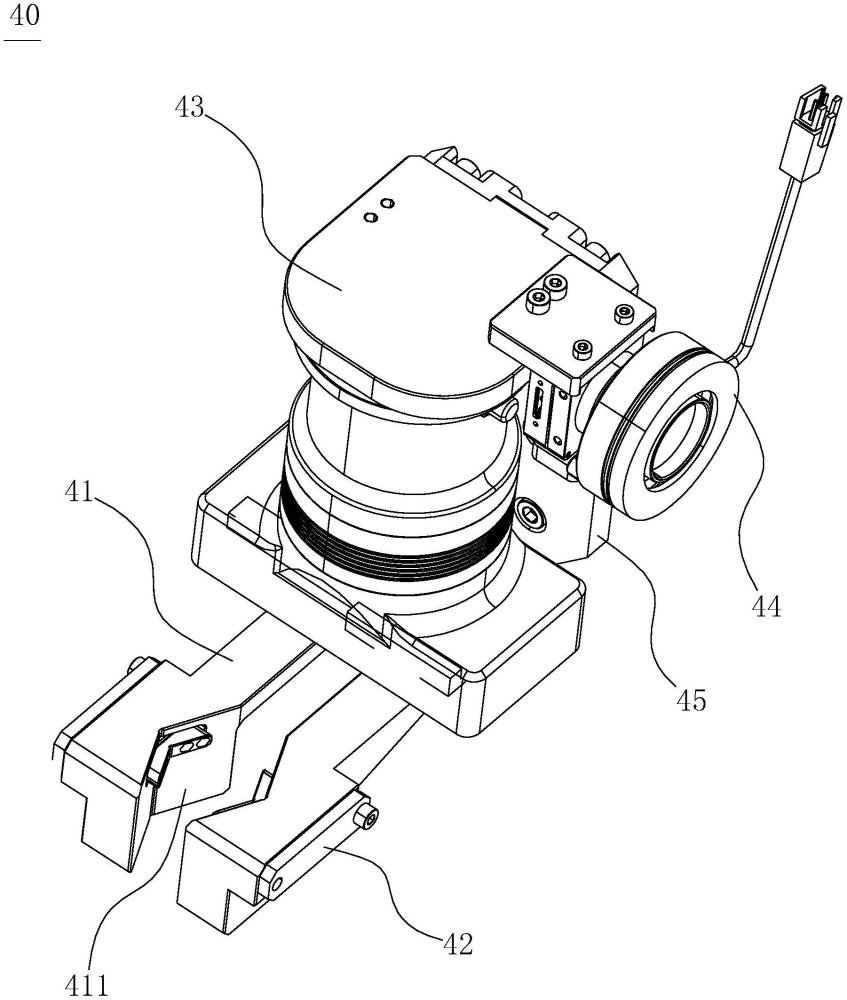
7、末端夹爪,连接于所述机械臂的末端,所述末端夹爪包括两个用于夹紧刀具的夹紧指尖,所述夹紧指尖的内侧具有内凹的v型夹紧面,所述v型夹紧面上设有回弹夹块。
8、通过采用上述技术方案,待更换的刀具放置在随机治具台上,无人搬运车把随机治具台运输到工作位置,与无人搬运车连接的机械臂带动末端夹爪对数控机床刀库中的刀具进行更换,末端夹爪更换下来的旧刀具放置在随机治具台上,以此实现了自动更换刀具的功能。
9、可选的,所述末端夹爪包括用于提供夹紧指尖夹紧动力的电机。
10、可选的,所述电机为伺服电机。
11、通过采用上述技术方案,电机给末端夹爪提供稳定、可控的夹紧力,且伺服电机相对于气动装置噪音更小,不需要额外安装气源和连接气管,使用限制小。
12、可选的,所述电机连接所述夹紧指尖的一端,所述电机远离所述夹紧指尖的一端设置有连接板,以连接所述机械臂。
13、可选的,所述末端夹爪还包括用于辨识刀具位置的相机,所述相机连接在所述电机的一端。
14、通过采用上述技术方案,末端夹爪可以通过相机辨识刀具相关信息以准确夹取所需的刀具。
15、可选的,所述回弹夹块穿过所述夹紧指尖末端的孔,所述回弹夹块在所述v型夹紧面处呈内凹的v型,所述回弹夹块配合v型夹紧面共同夹紧刀具。
16、可选的,所述回弹夹块还包括依次排列的伸缩块、球头柱塞及弹簧。
17、通过采用上述技术方案,末端夹爪的v型夹紧面与回弹夹块的v型面共同作用夹紧刀具,回弹夹块的弹簧让回弹夹块可以在夹紧指尖末端的孔里来回移动以适应圆锥型刀柄的圆锥角度,让末端夹爪更好的抓紧圆锥型刀柄,回弹夹块让末端夹爪在夹多种类型的刀具时具有更多的接触点,增加接触面积,使末端夹爪夹刀具时夹得更紧,所以末端夹爪能够适应多种类型的刀具。
18、可选的,所述末端夹爪通过所述电机上的所述连接板连接在所述机械臂一端,所述机械臂另一端连接在所述无人搬运车上,所述无人搬运车具有可以在地面上自由移动和转向的脚轮。
19、通过采用上述技术方案,末端夹爪在无人搬运车与机械臂的共同作用下具有更大的活动范围,可以一个机器人应对多个机床的刀具更换作业。
20、一种末端夹爪连接于所述机械臂的末端,所述末端夹爪包括两个用于夹紧刀具的夹紧指尖,所述夹紧指尖的内侧设有内凹的v型夹紧面,所述v型夹紧面上安装有回弹夹块。
21、可选的,所述回弹夹块包括依次连接的伸缩块、球头柱塞、弹簧及挡块,所述球头柱塞类似于“u”型结构,所述球头柱塞的球头分别位于所述伸缩块的两侧,所述球头柱塞的球头抵接所述夹紧指尖。具体的,所述回弹夹块包括u型的球头柱塞、连接在所述球头柱塞上的伸缩块及一端连接所述球头柱塞而另一端连接挡块的弹簧,所述球头柱塞的球头位于所述伸缩块的侧边并抵接所述夹紧指尖。
22、通过采用上述技术方案,球头柱塞两侧抵接夹紧指尖让回弹夹块保持在直线上来回运动,以避免回弹夹块因发生侧移而堵塞。
23、综上所述,本申请包括以下至少一种有益技术效果:
24、1.夹紧指尖设有可移动的回弹夹块增加了末端夹头与多种类型刀具的接触点,使末端夹爪可以夹紧多种类型的刀具,增大了末端夹爪的兼容性;
25、2.电动夹爪噪音更低,不用额外安装气源和连接气管,使用限制小;
26、3.无人搬运车让末端夹爪与机械臂让末端夹爪具有更大的活动空间,一个机器人即可完成多个机床的刀具更换作业,节约成本。
技术特征:
1.一种自动更换cnc刀具的机器人装置,其特征在于,包括:
2.根据权利要求1所述的机器人装置,其特征在于,所述末端夹爪(40)包括用于驱动所述夹紧指尖(41)夹紧的电机(43),所述电机(43)为伺服电机。
3.根据权利要求2所述的机器人装置,其特征在于,所述电机(43)连接所述夹紧指尖(41)的一端,所述电机(43)远离所述夹紧指尖(41)的一端设置有连接板(45),以连接所述机械臂(30)。
4.根据权利要求2所述的机器人装置,其特征在于,所述末端夹爪(40)还包括用于辨识刀具位置的相机(44),所述相机(44)连接在所述电机(43)远离所述夹紧指尖(41)的一端。
5.根据权利要求1所述的机器人装置,其特征在于,所述回弹夹块(42)穿过所述夹紧指尖(41),所述回弹夹块(42)在所述v型夹紧面(411)处呈内凹的v型,以配合所述v型夹紧面(411)夹紧刀具。
6.根据权利要求1所述的机器人装置,其特征在于,所述回弹夹块(42)包括:伸缩块(421)、连接所述伸缩块(421)的球头柱塞(422)及顶住球头柱塞(422)弹簧(423)。
7.根据权利要求1所述的机器人装置,其特征在于,所述机械臂(30)一端连接所述末端夹爪(40),另一端连接所述无人搬运车(10);所述无人搬运车(10)具有可自由转向的脚轮以在地面上运动。
8.根据权利要求1所述的机器人装置,其特征在于,所述随机治具台(20)呈阶梯形状连接在所述无人搬运车上。
9.一种末端夹爪,其特征在于,连接于机械臂(30)的末端,末端夹爪(40)包括:两个用于夹紧刀具的夹紧指尖(41),所述夹紧指尖(41)的内侧具有内凹的v型夹紧面(411),所述v型夹紧面(411)上设有回弹夹块(42)。
10.根据权利要求9所述的末端夹爪,其特征在于,所述回弹夹块(42)包括u型的球头柱塞(422)、连接在所述球头柱塞(422)上的伸缩块(421)及一端连接所述球头柱塞(422)而另一端连接挡块(424)的弹簧(423),所述球头柱塞(422)的球头位于所述伸缩块(421)的侧边并抵接所述夹紧指尖(41)。
技术总结
本申请涉及一种自动更换CNC刀具的机器人装置与末端夹爪,机器人装置包括无人搬运车、承载与无人搬运车上用于放置待更换刀具的随机治具台、用于夹紧刀具的末端夹爪与一端连接末端夹爪而另一端连接无人搬运车的机械臂;末端夹爪包括两个夹紧指尖,夹紧指尖的内侧具有V型夹紧面,在V型夹紧面上设有穿过V型夹紧面的回弹夹块,回弹夹块可以在V型夹紧面上往复运动以适应圆锥刀柄的圆锥角度,让末端夹爪与刀具有更多的接触点,以便更好的夹紧刀具。
技术研发人员:王洪磊,于浩,宋玉兵
受保护的技术使用者:敬科(山东)智能科技有限公司
技术研发日:20230712
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!