一种牵拉式双臂摆头的制作方法
本技术涉及机械设备,具体为一种牵拉式双臂摆头。
背景技术:
1、双摆铣头是数控多轴联动机床的核心部件之一,广泛应用于数控五面体铣床,数控系统,是数字控制系统的简称(numerical control system),根据计算机存储器中存储的控制程序,执行部分或全部数值控制功能,并配有接口电路和伺服驱动装置的专用计算机系统。通过利用数字、文字和符号组成的数字指令来实现一台或多台机械设备动作控制,它所控制的通常是位置、角度、速度等机械量和开关量。其灵活性、通用性、可靠性更好,易于实现复杂的数控功能,使用、维护也方便,并具有与网络连接及进行远程通信的功能。
2、传统的双臂摆头配合数控系统使用,但是传统的双臂摆头在使用时操作灵敏度差,在面对一些需要精细操作时无法满足需求,同时也降低了产品的生产效率和产品的质量。
技术实现思路
1、本实用新型的目的在于提供一种牵拉式双臂摆头,以解决上述背景技术中提出的问题。
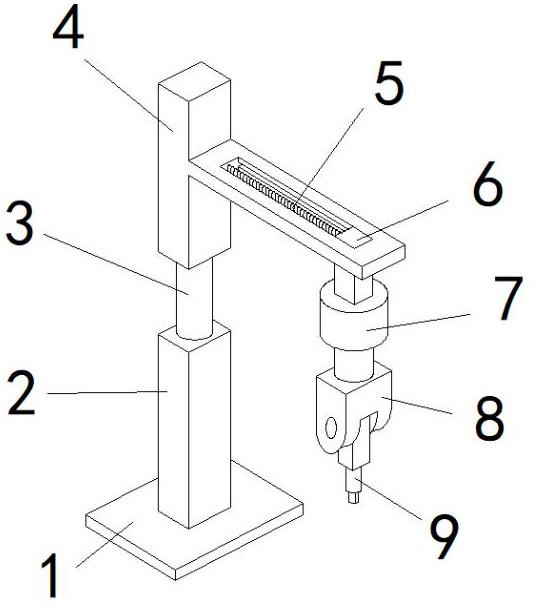
2、为实现上述目的,本实用新型提供如下技术方案:一种牵拉式双臂摆头,包括底座,所述底座的顶面设置有限位块,所述限位块的上方设置有升降杆,所述升降杆的顶面设置有牵拉块,所述牵拉块的内部设置有螺纹牵拉杆,所述螺纹牵拉杆的一侧设置有活动块,所述活动块的底端设置有数控旋转块,所述数控旋转块的底面设置有双臂限位块,所述双臂限位块的下方设置有夹取摆头。
3、优选的,所述升降杆的底面设置有两个限位杆,所述升降杆的底面设置有螺纹转杆。
4、优选的,所述限位块的内部底端设置有第一电机,所述第一电机的底面与设置有限位块内部放置槽的底面固定连接。
5、优选的,所述牵拉块的内部设置有第二电机,所述第二电机的输出端设置有螺纹转齿。
6、优选的,所述活动块的两侧面设置有两个卡块,所述活动块的上端侧面开设有活动连接孔。
7、优选的,所述螺纹牵拉杆的一端设置有带环连接杆,所述带环连接杆的一端与螺纹牵拉杆的一端固定连接。
8、与现有技术相比,本实用新型的有益效果是:
9、该一种牵拉式双臂摆头,通过设置的限位块和升降杆、牵拉块、螺纹牵拉杆、活动块,可以对双臂摆头进行水平和垂直方向的高度与距离进行自由调节,通过设置的数控旋转块和双臂限位块、夹取摆头,可以对双臂摆头进行360°全方位精密的控制,相互配合使用,提高了双臂摆头的操作灵敏度,同时提高了产品的生产效率和质量。
10、该一种牵拉式双臂摆头,通过设置的底座和限位块、升降杆、限位杆、螺纹转杆,可以对双臂摆头进行精密控制并使其在垂直升降过程中平稳进行不受外力影响,通过设置的牵拉块和螺纹牵拉杆、第二电机、螺纹转齿、活动块、带环连接杆,可以对双臂摆头进行紧密控制并使其在水平移动过程中平稳进行不受外力影响,相互配合使用,可以有效的避免因外力因素导致双臂摆头在运行过程中发生位置偏移的问题。
技术特征:
1.一种牵拉式双臂摆头,包括底座(1),其特征在于:所述底座(1)的顶面设置有限位块(2),所述限位块(2)的上方设置有升降杆(3),所述升降杆(3)的顶面设置有牵拉块(4),所述牵拉块(4)的内部设置有螺纹牵拉杆(5),所述螺纹牵拉杆(5)的一侧设置有活动块(6),所述活动块(6)的底端设置有数控旋转块(7),所述数控旋转块(7)的底面设置有双臂限位块(8),所述双臂限位块(8)的下方设置有夹取摆头(9)。
2.根据权利要求1所述的一种牵拉式双臂摆头,其特征在于:所述升降杆(3)的底面设置有两个限位杆(10),所述升降杆(3)的底面设置有螺纹转杆(11)。
3.根据权利要求1所述的一种牵拉式双臂摆头,其特征在于:所述限位块(2)的内部底端设置有第一电机(12),所述第一电机(12)的底面与设置有限位块(2)内部放置槽的底面固定连接。
4.根据权利要求1所述的一种牵拉式双臂摆头,其特征在于:所述牵拉块(4)的内部设置有第二电机(13),所述第二电机(13)的输出端设置有螺纹转齿(14)。
5.根据权利要求1所述的一种牵拉式双臂摆头,其特征在于:所述活动块(6)的两侧面设置有两个卡块(15),所述活动块(6)的上端侧面开设有活动连接孔(16)。
6.根据权利要求1所述的一种牵拉式双臂摆头,其特征在于:所述螺纹牵拉杆(5)的一端设置有带环连接杆(17),所述带环连接杆(17)的一端与螺纹牵拉杆(5)的一端固定连接。
技术总结
本技术公开了一种牵拉式双臂摆头,包括底座,所述底座顶面设置有限位块,所述限位块上方设置有升降杆,所述升降杆顶面设置有牵拉块,所述牵拉块内部设置有螺纹牵拉杆,所述螺纹牵拉杆一侧设置有活动块,所述活动块底端设置有数控旋转块,所述数控旋转块底面设置有双臂限位块,所述双臂限位块下方设置有夹取摆头。该一种牵拉式双臂摆头,通过设置的限位块和升降杆、牵拉块、螺纹牵拉杆、活动块,可以对双臂摆头进行水平和垂直方向的高度与距离进行自由调节,通过设置的数控旋转块和双臂限位块、夹取摆头,可以对双臂摆头进行360°全方位精密的控制,相互配合使用,提高了双臂摆头的操作灵敏度,同时提高了产品的生产效率和质量。
技术研发人员:潘绪露,汪兴兴,王志佳,张尊棒
受保护的技术使用者:苏州帝奥卡精密科技有限公司
技术研发日:20230717
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!