制动钳四面多工位手爪的制作方法
本技术涉及机械手,尤其涉及一种制动钳四面多工位手爪。
背景技术:
1、轿车的刹车分为两种,一种是前后均为盘式制动器;另一种是前盘后鼓式制动器。制动钳存在于盘式制动器上,汽车在行驶过程中,制动盘随着车轮转动,制动钳是固定不动的,当刹车时,制动钳夹住制动盘完成制动作用,现有的汽车制动钳不但操作不方便,而且还会增加人工成本。
2、在生产制动钳的过程中,通过机械手对机床上制动钳进行上下料,现有机械手通过一个手爪只能一取一放两个工件来回装/卸,工序转换后,手指无法兼容正反两个面的抓取和定位,生产效率低,机床利用率低。
技术实现思路
1、本实用新型旨在解决上述缺陷,提供一种制动钳四面多工位手爪。
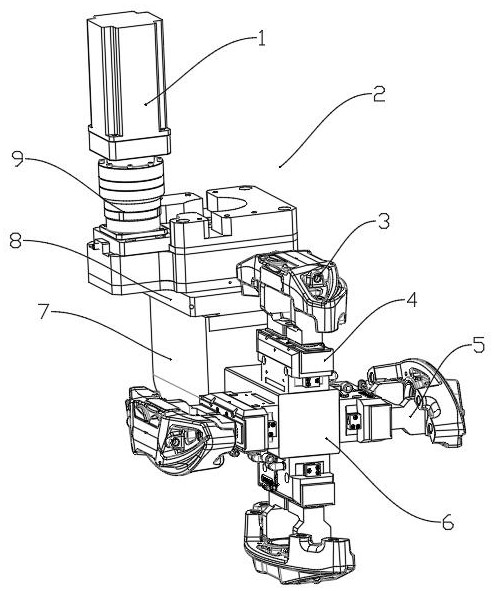
2、为了克服背景技术中存在的缺陷,本实用新型解决其技术问题所采用的技术方案是:一种制动钳四面多工位手爪,包括旋转机构a、旋转机构a下端转动连接的旋转机构b以及旋转机构b侧面转动连接的转动体,所述旋转机构a控制旋转机构b在水平方向自动转动,所述旋转机构b控制转动体在垂直方向自动转动,所述转动体表面等距设置四个夹爪,所述夹爪上设置两个夹取制动钳的夹指,所述夹爪分别与气缸连接从而控制夹指向外撑开撑紧制动钳、向内收拢夹紧制动钳。
3、进一步的改进,包括所述旋转机构a与旋转机构b之间设置气浮动装置。
4、进一步的改进,包括所述旋转机构a包括驱动电机、上壳体以及安装在上壳体上的联轴器,所述驱动电机的输出端通过联轴器与上壳体内转动设置的主轴连接,所述上壳体内设有从动轴、内套以及与内套连接的从动齿轮,所述内套和从动齿轮一并套设在从动轴上,所述内套上套设滚珠轴承从而实现从动轴在上壳体内转动,所述从动齿轮与主轴上连接的主动齿轮啮合设置,所述从动轴与气浮动装置连接,从而通过齿轮传动带动气浮动装置旋转。
5、进一步的改进,包括所述从动齿轮与内套通过螺栓连接。
6、进一步的改进,包括所述旋转机构b包括下壳体以及在下壳体内横向放置的旋转电机,所述旋转电机的输出端与转动体连接。
7、进一步的改进,包括所述旋转电机的输出端上套设滚珠轴承a,所述滚珠轴承a嵌设进下壳体内。
8、本实用新型的有益效果是:本设计中夹指能够同时取、卸个制动钳提高了机床生产效率,机床利用率大大提高,夹指的设计能同时兼顾制动钳正反面抓取,大大降低成本,夹指兼容正反两个面制动钳的抓取和定位;气浮动装置能够在很小范围能自由活动,在机床上/卸料时打开浮动,抓取制动钳更加灵活,不会因为点位稍偏发生干涉,抓取完毕后关闭浮动,手爪不会因为浮动左右晃动,发生碰撞。
技术特征:
1.一种制动钳四面多工位手爪,其特征是,包括旋转机构a(2)、旋转机构a(2)下端转动连接的旋转机构b(7)以及旋转机构b(7)侧面转动连接的转动体(6),所述旋转机构a(2)控制旋转机构b(7)在水平方向自动转动,所述旋转机构b(7)控制转动体(6)在垂直方向自动转动,所述转动体(6)表面等距设置四个夹爪(4),所述夹爪(4)上设置两个夹取制动钳(3)的夹指(5),所述夹爪(4)分别与气缸连接从而控制夹指(5)向外撑开撑紧制动钳(3)、向内收拢夹紧制动钳(3)。
2.如权利要求1所述的一种制动钳四面多工位手爪,其特征在于:所述旋转机构a(2)与旋转机构b(7)之间设置气浮动装置(8)。
3.如权利要求2所述的一种制动钳四面多工位手爪,其特征在于:所述旋转机构a(2)包括驱动电机(1)、上壳体(15)以及安装在上壳体(15)上的联轴器(9),所述驱动电机(1)的输出端通过联轴器(9)与上壳体(15)内转动设置的主轴(18)连接,所述上壳体(15)内设有从动轴(14)、内套(10)以及与内套(10)连接的从动齿轮(16),所述内套(10)和从动齿轮(16)一并套设在从动轴(14)上,所述内套(10)上套设滚珠轴承(11)从而实现从动轴(14)在上壳体(15)内转动,所述从动齿轮(16)与主轴(18)上连接的主动齿轮(17)啮合设置,所述从动轴(14)与气浮动装置(8)连接,从而通过齿轮传动带动气浮动装置(8)旋转。
4.如权利要求3所述的一种制动钳四面多工位手爪,其特征在于:所述从动齿轮(16)与内套(10)通过螺栓连接。
5.如权利要求1-4任意一项所述的一种制动钳四面多工位手爪,其特征在于:所述旋转机构b(7)包括下壳体(12)以及在下壳体(12)内横向放置的旋转电机(13),所述旋转电机(13)的输出端与转动体(6)连接。
6.如权利要求5所述的一种制动钳四面多工位手爪,其特征在于:所述旋转电机(13)的输出端上套设滚珠轴承a(19),所述滚珠轴承a(19)嵌设进下壳体(12)内。
技术总结
本技术涉及机械手技术领域,尤其是一种制动钳四面多工位手爪,包括旋转机构A、旋转机构A下端转动连接的旋转机构B以及旋转机构B侧面转动连接的转动体,所述旋转机构A控制旋转机构B在水平方向自动转动,所述旋转机构B控制转动体在垂直方向自动转动,所述转动体表面等距设置四个夹爪,所述夹爪上设置两个夹取制动钳的夹指,所述夹爪分别与气缸连接从而控制夹指向外撑开撑紧制动钳、向内收拢夹紧制动钳。本技术采用此种结构的夹爪能够同时取、卸4个工件,提高了机床生产效率,机床利用率大大提高,夹指的设计能同时兼顾卡钳正反面抓取,大大降低成本。
技术研发人员:王海晶,王仓宝,王保全
受保护的技术使用者:海力特机器人常州有限公司
技术研发日:20230717
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!