一种铰页座机器人焊接工装以及人防门的制作方法
本技术涉及人防门铰页座焊接,尤其是涉及一种人防门铰页座机器人焊接工装。
背景技术:
1、人防是人民防空的简称,也特指为防空修缮的安全建筑,包括人防门等结构类设施,人防门是人民防护工程出入口的门,大多数通过铰页座铰接连接在门框上,铰页座通过底板和耳板焊接组成。
2、传统技术进行铰页座焊接的时候是焊接师傅用手固定住底板和耳板进行焊接,焊接的效率很低,同时人防门通常是硬度大的金属板结构,尤其是铰页座结构的材料更加优异,其质量也更大,增加了人工操作的难度。
3、为此,本领域技术人员提出一种人防门铰页座机器人焊接工装,设计一种用于铰页座焊接的设备,可以帮助工人进行铰页座的焊接工作。
技术实现思路
1、本实用新型的目的在于针对现有技术的不足之处,提供一种铰页座机器人焊接工装以及人防门,通过底板限位套分别对铰页座两侧底板进行限位,再通过铰页输送件将铰页输送到与底板对应位置并进行限位,方便对底板和铰页进行焊接,完成一侧铰页的焊接后再调节底板限位套靠近铰页进行另一端的焊接作业,稳定性高。
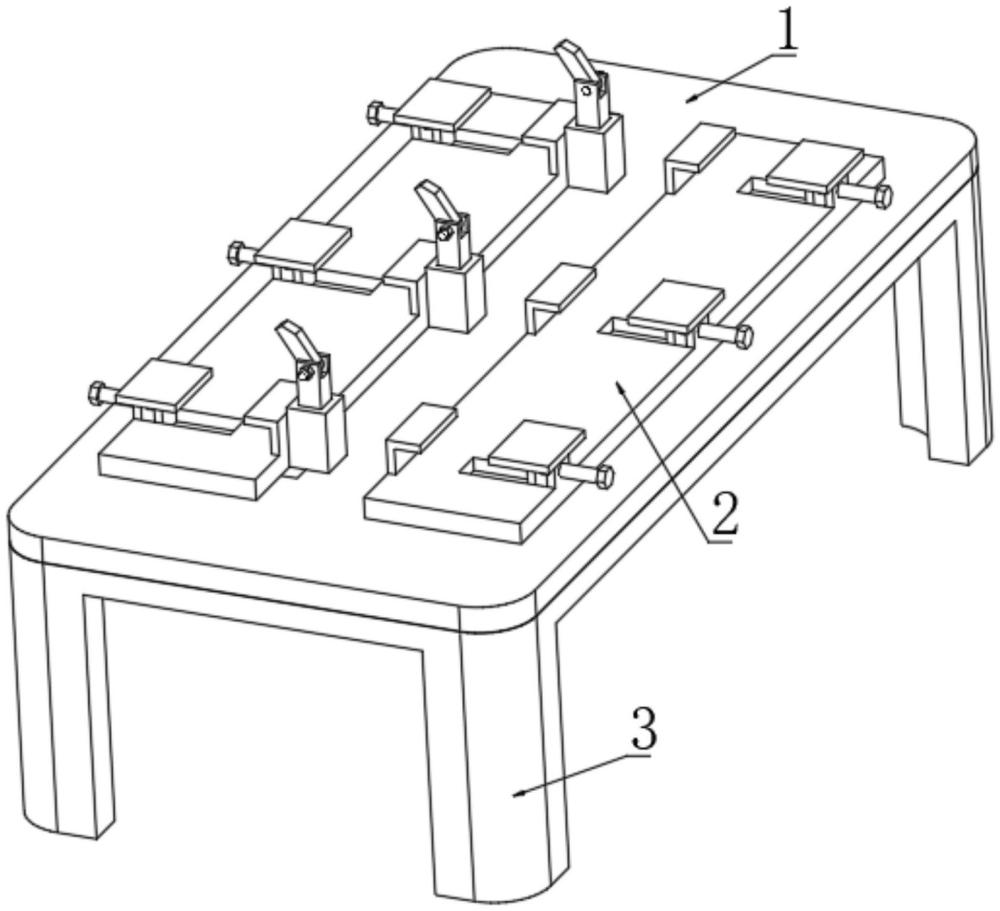
2、本实用新型通过以下技术方案来实现上述目的,一种铰页座机器人焊接工装,包括焊接平台,所述焊接平台的上表面设置有定位工装,所述定位工装包括底板限位套和铰页输送件,所述焊接平台的上表面滑动卡接有底板限位套,所述底板限位套的上表面固定设置有铰页输送件。
3、优选的,所述焊接平台的下表面固定设置有支撑架,所述焊接平台的上表面开设有与定位工装相适配的滑轨,所述底板限位套和铰页输送件通过滑轨与焊接平台滑动卡接。
4、优选的,所述底板限位套包括安装板和限位板,所述安装板滑动设置在滑轨的内侧,所述安装板的上表面滑动卡接有限位板,所述安装板的侧面贯穿设置有与限位板相适配的抵紧螺栓。
5、优选的,所述安装板的下表面固定连接有与滑轨相适配的滑块,两个所述限位板对称设置在安装板的上表面,其中一个所述限位板与安装板固定连接,另一个所述限位板与安装板滑动卡接。
6、优选的,所述安装板的上表面固定连接有固定凸块,所述抵紧螺栓贯穿固定凸块并与之螺纹连接。
7、优选的,所述铰页输送件包括升降杆和铰接杆,所述升降杆固定连接在底板限位套的上表面,所述升降杆的顶端铰接设置有铰接杆,铰页通过所述铰接杆限位设置。
8、优选的,所述铰接杆的顶端固定连接有铰接座,所述升降杆的侧面贯穿设置有与铰接杆相适配的铰轴,所述铰轴一端的侧面螺纹连接有紧位螺母。
9、一种人防门,包括一种铰页座机器人焊接工装,通过焊接工装进行人防门的焊接加工。
10、本实用新型的有益效果是:
11、为了进行铰页座的底板和铰页的稳定设置而设计的定位工装,通过底板限位套分别定位铰页座的两侧底板,再通过铰页输送件将铰页输送到靠近一侧底板的焊接位置,并对铰页校准后进行定位,方便进行铰页一端的焊接作业,在完成一侧的焊接后,通过另一侧底板的进位靠近,再经过校准后完成铰页另一端的焊接,稳定性强,避免人工定位的不确定性,同时避免人工长时间进行重物定位的困难,方便对质量大的铰页座进行定位焊接作业,保证焊接的精准性。
技术特征:
1.一种铰页座机器人焊接工装,包括焊接平台(1),其特征在于:所述焊接平台(1)的上表面设置有定位工装(2),所述定位工装(2)包括底板限位套(201)和铰页输送件(202),所述焊接平台(1)的上表面滑动卡接有底板限位套(201),所述底板限位套(201)的上表面固定设置有铰页输送件(202)。
2.如权利要求1所述的一种铰页座机器人焊接工装,其特征在于:所述焊接平台(1)的下表面固定设置有支撑架(3),所述焊接平台(1)的上表面开设有与定位工装(2)相适配的滑轨(4),所述底板限位套(201)和铰页输送件(202)通过滑轨(4)与焊接平台(1)滑动卡接。
3.如权利要求2所述的一种铰页座机器人焊接工装,其特征在于:所述底板限位套(201)包括安装板(2011)和限位板(2012),所述安装板(2011)滑动设置在滑轨(4)的内侧,所述安装板(2011)的上表面滑动卡接有限位板(2012),所述安装板(2011)的侧面贯穿设置有与限位板(2012)相适配的抵紧螺栓(5)。
4.如权利要求3所述的一种铰页座机器人焊接工装,其特征在于:所述安装板(2011)的下表面固定连接有与滑轨(4)相适配的滑块(6),两个所述限位板(2012)对称设置在安装板(2011)的上表面,其中一个所述限位板(2012)与安装板(2011)固定连接,另一个所述限位板(2012)与安装板(2011)滑动卡接。
5.如权利要求3所述的一种铰页座机器人焊接工装,其特征在于:所述安装板(2011)的上表面固定连接有固定凸块(7),所述抵紧螺栓(5)贯穿固定凸块(7)并与之螺纹连接。
6.如权利要求2所述的一种铰页座机器人焊接工装,其特征在于:所述铰页输送件(202)包括升降杆(2021)和铰接杆(2022),所述升降杆(2021)固定连接在底板限位套(201)的上表面,所述升降杆(2021)的顶端铰接设置有铰接杆(2022),铰页通过所述铰接杆(2022)限位设置。
7.如权利要求6所述的一种铰页座机器人焊接工装,其特征在于:所述铰接杆(2022)的顶端固定连接有铰接座(8),所述升降杆(2021)的侧面贯穿设置有与铰接杆(2022)相适配的铰轴(9),所述铰轴(9)一端的侧面螺纹连接有紧位螺母(10)。
8.一种人防门,其特征在于:包括权利要求1-7中任一项所述的所述一种铰页座机器人焊接工装,通过焊接工装进行人防门的焊接加工。
技术总结
本技术公开了一种铰页座机器人焊接工装以及人防门,包括焊接平台和定位工装,定位工装滑动卡接在焊接平台的上表面;该铰页座机器人焊接工装为了进行铰页座的底板和铰页的稳定设置而设计的定位工装,通过底板限位套分别定位铰页座的两侧底板,再通过铰页输送件将铰页输送到靠近一侧底板的焊接位置,并对铰页校准后进行定位,方便进行铰页一端的焊接作业,在完成一侧的焊接后,通过另一侧底板的进位靠近,再经过校准后完成铰页另一端的焊接,稳定性强,避免人工定位的不确定性,同时避免人工长时间进行重物定位的困难,方便对质量大的铰页座进行定位焊接作业,保证焊接的精准性。
技术研发人员:陈志杰,王冬霞,胡孝永,钱云龙,张增增,王丽,林新雅,董炜炜,温作平,孙迪军
受保护的技术使用者:温州泰昌人防设备有限公司
技术研发日:20230718
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!