一种用于焊接切割机器人的视觉定位检测装置的制作方法
本技术涉及焊接切割机器人视觉定位相关,具体为一种用于焊接切割机器人的视觉定位检测装置。
背景技术:
1、焊接切割机器人指的是在机械加工过程中,被用于对工件进行焊接以及切割加工的机器人,并且焊接切割机器人在对工件进行加工时,需要采用精准的视觉对位结构对工件进行定位;
2、参考中国专利授权公告号cn217193772u,授权公告日为2022.08.16,公开了一种用于机器人安装螺丝的视觉检测定位装置,该实用新型各滑板分别与对应的丝杆螺纹连接。本实用新型对位效率高,安装螺丝精准度高;
3、但是,现有技术中存在装置在移动转移至相应的工作位置时,容易受到外力的作用发生晃动甚至移动,影响在工作状态下的稳定性,而且对工件进行固定时整体的结构设计较为复杂的问题,例如上方所列举的对比专利存在该问题;
4、为此我们提出了一种用于焊接切割机器人的视觉定位检测装置,用来解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种用于焊接切割机器人的视觉定位检测装置,以解决上述背景技术中提出的现有技术中存在装置在移动转移至相应的工作位置时,容易受到外力的作用发生晃动甚至移动,影响在工作状态下的稳定性,而且对工件进行固定时整体的结构设计较为复杂的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种用于焊接切割机器人的视觉定位检测装置,包括固定台、固定连接在所述固定台下端左右两侧的固定柱、设置在所述固定台上方的加工台以及安装在所述加工台上端的拍摄相机;
3、其中,所述固定柱的下端安装有万向轮;
4、还包括:
5、稳定机构,所述稳定机构设置对称设置在固定台下端的左右两侧,且稳定机构用于对固定台进行辅助支撑;
6、活动块,所述活动块与丝杆之间通过螺纹的方式相连接,且活动块带动加工台在固定台的上端进行左右移动;
7、固定夹板,所述固定夹板铰链连接在固定杆的上端,且固定夹板对称设置在加工台上端的左右两侧,并且固定夹板通过固定杆在加工台的上端构成翻转结构。
8、优选的,所述稳定机构包括转动连接在固定柱下端的活动板、呈“t”字形结构的凸块、用于连接的辅助板、用于调节的连接栓以及转动连接在所述连接栓下端的支撑块。
9、优选的,所述活动板远离固定柱一端的上下两侧均固定连接有凸块,且活动板与固定柱之间通过固定栓进行限位,并且固定栓与活动板以及固定栓与固定柱之间均为螺纹连接。
10、优选的,所述凸块与辅助板之间通过滑动的方式相连接,且辅助板与连接栓之间通过螺纹的方式相连接,并且连接栓带动支撑块在辅助板的下端构成伸缩结构。
11、优选的,所述固定台的上端固定连接有用于支撑的固定架,且固定架的右端固定安装有伺服电机,并且伺服电机的输出端固定连接有丝杆。
12、优选的,所述伺服电机带动丝杆在固定架的中部进行转动,且丝杆带动活动块与固定架之间构成左右滑动结构,并且活动块固定连接在加工台的下端。
13、优选的,所述加工台下端的左右两侧均安装有电动伸缩杆,且电动伸缩杆的输出端固定连接有固定块,并且固定块与活动套之间通过铰链的方式相连接。
14、优选的,所述活动套滑动连接在固定杆下端的外表面,且固定杆分别转动连接在加工台的左右两端。
15、与现有技术相比,本实用新型的有益效果是:该用于焊接切割机器人的视觉定位检测装置,便于通过稳定机构的设置,能够对装置整体进行辅助支撑,提升装置在工作状态下的稳定性,通过固定杆带动固定夹板在加工台上构成翻转结构,能够非常便捷的对工件进行自动夹持限位,紧固性好,防止工件在焊接切割加工过程中产生松脱,结合丝杆带动活动块与固定架之间进行自动滑动,便于带动工件的位置进行自动定位,对工件的加工位置进行调节;
16、1、设有稳定机构,稳定机构对称设置在固定台的左右两端,并且稳定机构包括活动板、凸块、辅助板、连接栓和支撑块,通过稳定机构的设置,便于对装置进行辅助支撑,提升装置在工作状态时的稳定性;
17、2、设有固定架、活动块和加工台,通过丝杆带动活动块与固定架之间构成左右滑动结构,能够非常便捷的使得加工台带动工件的加工位置进行自动调整和定位;
18、3、设有固定杆和固定夹板,固定夹板铰链连接在固定杆的上端,并且固定杆带动固定夹板在加工台上构成翻转结构,进而便于对加工台上的工件进行稳定夹持,紧固性好。
技术特征:
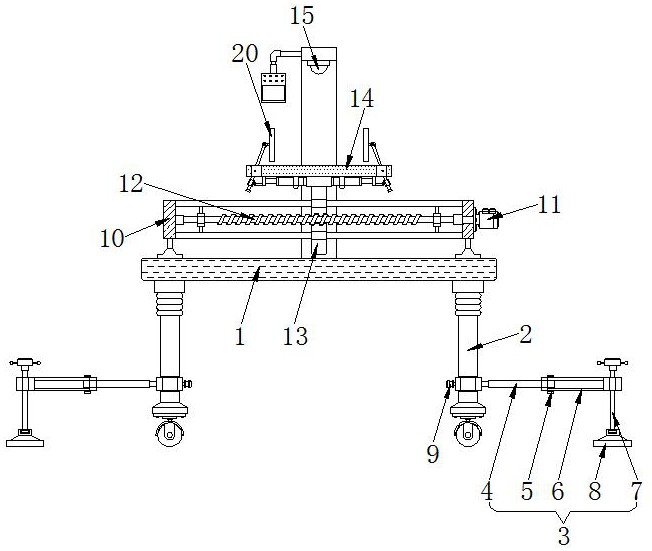
1.一种用于焊接切割机器人的视觉定位检测装置,包括固定台(1)、固定连接在所述固定台(1)下端左右两侧的固定柱(2)、设置在所述固定台(1)上方的加工台(14)以及安装在所述加工台(14)上端的拍摄相机(15);
2.根据权利要求1所述的一种用于焊接切割机器人的视觉定位检测装置,其特征在于:所述稳定机构(3)包括转动连接在固定柱(2)下端的活动板(4)、呈“t”字形结构的凸块(5)、用于连接的辅助板(6)、用于调节的连接栓(7)以及转动连接在所述连接栓(7)下端的支撑块(8)。
3.根据权利要求2所述的一种用于焊接切割机器人的视觉定位检测装置,其特征在于:所述活动板(4)远离固定柱(2)一端的上下两侧均固定连接有凸块(5),且活动板(4)与固定柱(2)之间通过固定栓(9)进行限位,并且固定栓(9)与活动板(4)以及固定栓(9)与固定柱(2)之间均为螺纹连接。
4.根据权利要求3所述的一种用于焊接切割机器人的视觉定位检测装置,其特征在于:所述凸块(5)与辅助板(6)之间通过滑动的方式相连接,且辅助板(6)与连接栓(7)之间通过螺纹的方式相连接,并且连接栓(7)带动支撑块(8)在辅助板(6)的下端构成伸缩结构。
5.根据权利要求1所述的一种用于焊接切割机器人的视觉定位检测装置,其特征在于:所述固定台(1)的上端固定连接有用于支撑的固定架(10),且固定架(10)的右端固定安装有伺服电机(11),并且伺服电机(11)的输出端固定连接有丝杆(12)。
6.根据权利要求5所述的一种用于焊接切割机器人的视觉定位检测装置,其特征在于:所述伺服电机(11)带动丝杆(12)在固定架(10)的中部进行转动,且丝杆(12)带动活动块(13)与固定架(10)之间构成左右滑动结构,并且活动块(13)固定连接在加工台(14)的下端。
7.根据权利要求6所述的一种用于焊接切割机器人的视觉定位检测装置,其特征在于:所述加工台(14)下端的左右两侧均安装有电动伸缩杆(16),且电动伸缩杆(16)的输出端固定连接有固定块(17),并且固定块(17)与活动套(18)之间通过铰链的方式相连接。
8.根据权利要求7所述的一种用于焊接切割机器人的视觉定位检测装置,其特征在于:所述活动套(18)滑动连接在固定杆(19)下端的外表面,且固定杆(19)分别转动连接在加工台(14)的左右两端。
技术总结
本技术公开了一种用于焊接切割机器人的视觉定位检测装置,包括固定台、固定连接在所述固定台下端左右两侧的固定柱、设置在所述固定台上方的加工台以及安装在所述加工台上端的拍摄相机,稳定机构,所述稳定机构设置对称设置在固定台下端的左右两侧,活动块,所述活动块与丝杆之间通过螺纹的方式相连接,且活动块带动加工台在固定台的上端进行左右移动,固定夹板,所述固定夹板铰链连接在固定杆的上端。该用于焊接切割机器人的视觉定位检测装置,能够对装置整体进行辅助支撑,提升装置在工作状态下的稳定性,还能够非常便捷的对工件进行自动夹持限位,便于带动工件的位置进行自动定位,对工件的加工位置进行调节。
技术研发人员:孙希伟
受保护的技术使用者:苏州心灵之窗智能机器人有限公司
技术研发日:20230719
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!