一种机器人翻转治具的制作方法
本技术属于机器人,尤其涉及一种机器人翻转治具。
背景技术:
1、目前,冲压行业大多数以实现自动化机器代替人工进行工作,机器人能够实现翻转的方式也越来越多样化,但现有的翻转方式还存在以下不足:
2、1.现有的机器人翻转方式复杂,需多个机器人工位进行传递才能翻转,例如,第一个机器人吸取工件后需放置到指定的翻转台先进行翻转,接着,第二个机器人再去吸取已翻转的工件进行冲压的下一道工序,这种翻转方式工序多,运行速度慢,导致生产效率低,且生产周期长,成本最终变高;
3、2.现有的机器人翻转结构难以适应不同冲压产品结构的生产需求,不同规格的冲压产品的形状、长度和高度等都不一样,已有的翻转台为适用的不同冲压产品,每次更换品线都需要根据冲压产品规格从新调整翻转台的零部件,导致翻转台结构变化复杂,实用性不高。
技术实现思路
1、本实用新型的目的在于提供一种机器人翻转治具,以解决上述背景技术提出的需多个机器人工位才能进行翻转传递、翻转结构难以适应不同冲压产品的生产需求,导致实用性不高,运行速度慢,以及生产效率低,最终成本变高的问题。
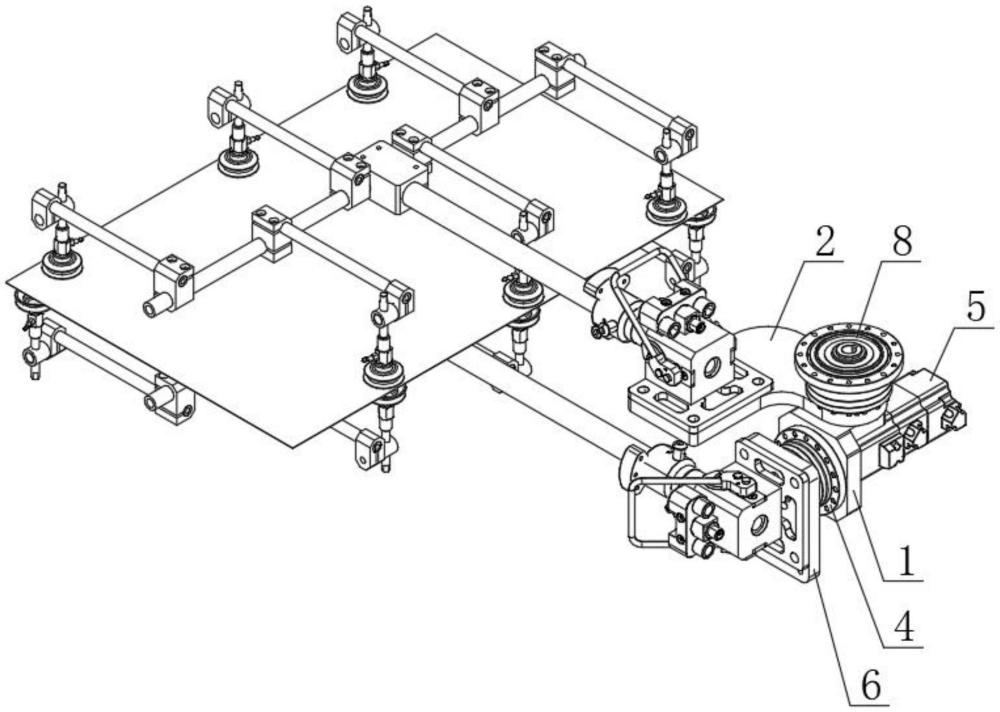
2、为实现上述目的,本实用新型提供一种机器人翻转治具,包括安装座,所述安装座上端面连接设有上端板,所述上端板上连接设有用于吸附板材的上吸组件,所述安装座前端面设有圆盘体,所述安装座内设有电机,所述电机的输出轴与圆盘体的一侧连接,所述圆盘体的另一侧连接设有竖向板,所述竖向板连接设有可摆动翻转的下吸组件,所述电机驱动下吸组件进行摆动,使所述下吸组件反向吸附上吸组件所在的板材,并摆动使板材正向放置而实现翻转功能。
3、优选的,所述上吸组件包括第一法兰体、第一导杆和第一吸盘组件,所述上端板上固定连接设有第一法兰体,所述第一导杆的一端插入第一法兰体可拆卸连接,所述第一导杆的另一端连接设有第一吸盘组件。
4、优选的,所述第一吸盘组件包括第一支架、第一连接块和第一真空吸盘,所述第一支架中部通过第一连接块连接于第一导轨上,所述第一支架的末端连接设有用于吸附板材的若干第一真空吸盘。
5、优选的,所述下吸组件包括第二法兰体、第二导杆和第二吸盘组件,所述竖向板上固定连接设有第二法兰体,所述第二导杆的一端插入第二法兰体可拆卸连接,所述第二导杆的另一端连接设有第二吸盘组件。
6、优选的,所述第二吸盘组件包括第二支架、第二连接块和第二真空吸盘,所述第二支架中部通过第二连接块连接于第二导轨上,所述第二支架的末端连接设有用于吸附板材的若干第二真空吸盘。
7、优选的,所述上端板上设有转盘连接体,所述转盘连接体位于安装座上方。
8、优选的,所述转盘连接体上连接设有可活动机械臂,所述机械臂另一端连接设有操控机台。
9、相对于现有技术的有益效果:
10、本实用新型提供的一种机器人翻转治具,通过在安装座上同时设计有上吸组件和下吸组件,先利用上吸组件向下吸附板材正面并取出,再利用下吸组件反向吸附上吸组件所在板材的反面,基于电机转动驱使下吸组件摆动180度,使板材回归到正面放置,从而实现板材的翻转,能够替换传统翻转的多个工位机器人操作方式,大大节约了冲压工艺流程,缩短工期,有助于提高生产率。
技术特征:
1.一种机器人翻转治具,包括安装座,其特征在于,所述安装座上端面连接设有上端板,所述上端板上连接设有用于吸附板材的上吸组件,所述安装座前端面设有圆盘体,所述安装座内设有电机,所述电机的输出轴与圆盘体的一侧连接,所述圆盘体的另一侧连接设有竖向板,所述竖向板连接设有可摆动翻转的下吸组件,所述电机驱动下吸组件进行摆动,使所述下吸组件反向吸附上吸组件所在的板材,并摆动使板材正向放置而实现翻转功能。
2.根据权利要求1所述的机器人翻转治具,其特征在于,所述上吸组件包括第一法兰体、第一导杆和第一吸盘组件,所述上端板上固定连接设有第一法兰体,所述第一导杆的一端插入第一法兰体可拆卸连接,所述第一导杆的另一端连接设有第一吸盘组件。
3.根据权利要求2所述的机器人翻转治具,其特征在于,所述第一吸盘组件包括第一支架、第一连接块和第一真空吸盘,所述第一支架中部通过第一连接块连接于第一导轨上,所述第一支架的末端连接设有用于吸附板材的若干第一真空吸盘。
4.根据权利要求1所述的机器人翻转治具,其特征在于,所述下吸组件包括第二法兰体、第二导杆和第二吸盘组件,所述竖向板上固定连接设有第二法兰体,所述第二导杆的一端插入第二法兰体可拆卸连接,所述第二导杆的另一端连接设有第二吸盘组件。
5.根据权利要求4所述的机器人翻转治具,其特征在于,所述第二吸盘组件包括第二支架、第二连接块和第二真空吸盘,所述第二支架中部通过第二连接块连接于第二导轨上,所述第二支架的末端连接设有用于吸附板材的若干第二真空吸盘。
6.根据权利要求1-5任意一项所述的机器人翻转治具,其特征在于,所述上端板上设有转盘连接体,所述转盘连接体位于安装座上方。
7.根据权利要求6所述的机器人翻转治具,其特征在于,所述转盘连接体上连接设有可活动机械臂,所述机械臂另一端连接设有操控机台。
技术总结
本技术公开了属于机器人技术领域的一种机器人翻转治具,包括安装座,所述安装座上端面连接设有上端板,所述上端板上连接设有用于吸附板材的上吸组件,所述安装座前端面设有圆盘体,所述安装座内设有电机,所述电机的输出轴与圆盘体的一侧连接,所述圆盘体的另一侧连接设有竖向板,所述竖向板连接设有可摆动翻转的下吸组件。本技术先利用上吸组件向下吸附板材正面并取出,再利用下吸组件反向吸附上吸组件所在板材的反面,基于电机转动驱使下吸组件摆动180度,使板材回归到正面放置,从而实现板材的翻转,能够替换传统翻转的多个工位机器人操作方式,大大节约了冲压工艺流程,缩短工期,有助于提高生产率。
技术研发人员:柏中超,刘淦,刘钟军,梁纶高,李治东,李法鹏
受保护的技术使用者:广州合纵智能设备有限公司
技术研发日:20230724
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!