一种智能多轴工业激光焊接机器人的制作方法
本技术涉及激光焊接,尤其涉及一种智能多轴工业激光焊接机器人。
背景技术:
1、激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法。
2、现有技术中,如中国专利cn215999102u公开了一种多轴工业激光焊接机器人,包括箱体、支板和皮带,支板的内侧安装有转辊,支板和箱体的内侧均安装有撑辊,支板的一侧通过螺栓安装有电机,箱体的另两侧安装有透镜,箱体的两侧安装有侧门,箱体的两侧焊接有卡板,箱体的一侧的顶部焊接有风筒,风筒的内侧通过螺栓安装有风机。
3、但现有技术中,加工厂在焊接而金属板时,工件大多直接放置于操作台表面进行加工,在焊接过程中误碰到工件会造成工件偏移,会造成焊接位置出现偏差,且对金属板的背面进行焊接时较为不便,手动翻转金属板的位置时也会出现偏差,对焊接精度造成影响。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的加工厂在焊接而金属板时,工件大多直接放置于操作台表面进行加工,在焊接过程中误碰到工件会造成工件偏移,会造成焊接位置出现偏差,且对金属板的背面进行焊接时较为不便,手动翻转金属板的位置时也会出现偏差,对焊接精度造成影响的问题,而提出的一种智能多轴工业激光焊接机器人。
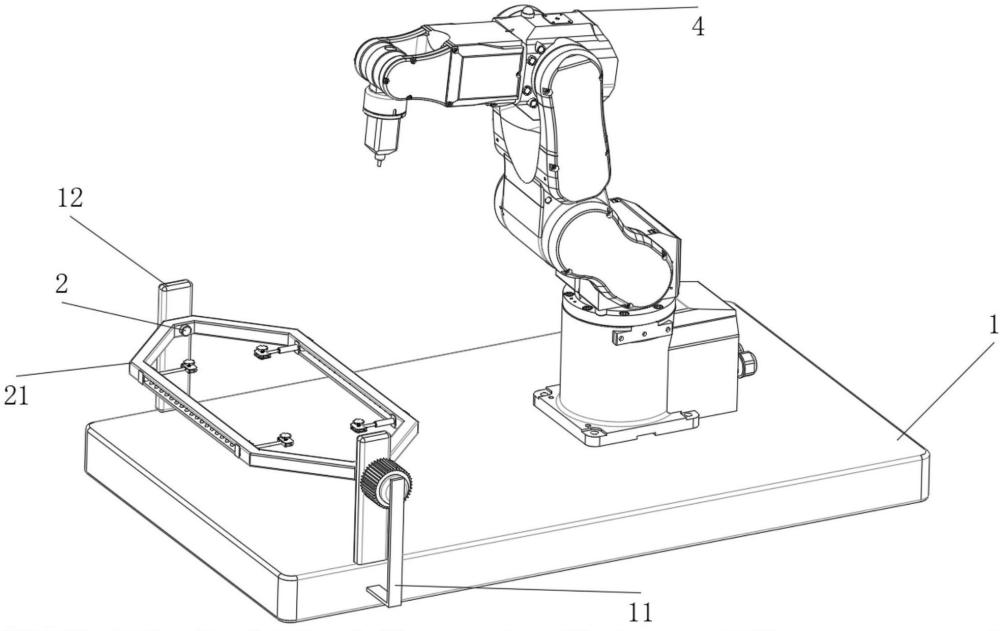
2、为了实现上述目的,本实用新型采用了如下技术方案:一种智能多轴工业激光焊接机器人,包括底座,所述底座的顶端中部两侧均固定连接有固定架,两个所述固定架的中部上方均转动连接有连接轴,两个所述连接轴之间固定连接有框架,所述底座的一侧固定连接有电机架,所述电机架的一侧上方固定连接有传动电机,所述传动电机的输出端穿过固定架与连接轴固定连接,所述框架内部的两侧均开设有滑槽,两个所述滑槽内均滑动连接有滑块,两个所述滑块的两侧均固定连接有限位板,一侧的所述限位板的一侧中部固定连接有伸缩杆,所述伸缩杆的输出端固定连接有夹持块,另一侧的所述限位板的一侧中部固定连接有固定杆,所述固定杆的一端与夹持块固定连接。
3、优选的,所述滑槽的内部开设有安装槽,所述安装槽的内部固定连接有弹簧,所述弹簧的一端固定连接有限位块。
4、优选的,所述滑块的底端中部开设有限位槽。
5、优选的,所述夹持块的中部开设有螺纹孔,所述螺纹孔内螺纹连接有螺杆,所述螺杆的顶端固定连接有把手。
6、优选的,所述底座的顶端中部一侧设置有机器人焊接臂。
7、优选的,所述限位块与限位槽卡接。
8、与现有技术相比,本实用新型的优点和积极效果在于:
9、本实用新型中,通过电机带动夹持机构翻转的设计,使对金属板进行焊接时,金属板位置得到固定的同时可以进行翻转,对金属板固定的同时减小了手动翻转金属板的时间以及翻转时产生的位置偏差。
技术特征:
1.一种智能多轴工业激光焊接机器人,其特征在于:包括底座(1),所述底座(1)的顶端中部两侧均固定连接有固定架(12),两个所述固定架(12)的中部上方均转动连接有连接轴(2),两个所述连接轴(2)之间固定连接有框架(21),所述底座(1)的一侧固定连接有电机架(11),所述电机架(11)的一侧上方固定连接有传动电机(35),所述传动电机(35)的输出端穿过固定架(12)与连接轴(2)固定连接,所述框架(21)内部的两侧均开设有滑槽(22),两个所述滑槽(22)内均滑动连接有滑块(23),两个所述滑块(23)的两侧均固定连接有限位板(24),一侧的所述限位板(24)的一侧中部固定连接有伸缩杆(25),所述伸缩杆(25)的输出端固定连接有夹持块(26),另一侧的所述限位板(24)的一侧中部固定连接有固定杆(34),所述固定杆(34)的一端与夹持块(26)固定连接。
2.根据权利要求1所述的一种智能多轴工业激光焊接机器人,其特征在于:所述滑槽(22)的内部开设有安装槽(3),所述安装槽(3)的内部固定连接有弹簧(31),所述弹簧(31)的一端固定连接有限位块(32)。
3.根据权利要求1所述的一种智能多轴工业激光焊接机器人,其特征在于:所述滑块(23)的底端中部开设有限位槽(33)。
4.根据权利要求1所述的一种智能多轴工业激光焊接机器人,其特征在于:所述夹持块(26)的中部开设有螺纹孔(27),所述螺纹孔(27)内螺纹连接有螺杆(28),所述螺杆(28)的顶端固定连接有把手(29)。
5.根据权利要求1所述的一种智能多轴工业激光焊接机器人,其特征在于:所述底座(1)的顶端中部一侧设置有机器人焊接臂(4)。
6.根据权利要求2所述的一种智能多轴工业激光焊接机器人,其特征在于:所述限位块(32)与限位槽(33)卡接。
技术总结
本技术公开了一种智能多轴工业激光焊接机器人,涉及激光焊接技术领域,包括底座,所述底座的顶端中部两侧均固定连接有固定架,两个所述固定架的中部上方均转动连接有连接轴,两个所述连接轴之间固定连接有框架,所述底座的一侧固定连接有电机架,所述电机架的一侧上方固定连接有传动电机,所述传动电机的输出端穿过固定架与连接轴固定连接,所述框架内部的两侧均开设有滑槽,两个所述滑槽内均滑动连接有滑块,两个所述滑块的两侧均固定连接有限位板。本技术中,通过电机带动夹持机构翻转的设计,使对金属板进行焊接时,金属板位置得到固定的同时可以进行翻转,对金属板固定的同时减小了手动翻转金属板的时间以及翻转时产生的位置偏差。
技术研发人员:杨踪远,踪训启
受保护的技术使用者:苏州德益丰汽车科技股份有限公司
技术研发日:20230727
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!