一种叉车油箱自动化焊接装置的制作方法
本技术涉及叉车制造,具体涉及一种叉车油箱自动化焊接装置。
背景技术:
1、叉车是工业生产中不可缺少的搬运车辆,叉车的主要组成部件有工作装置、动力装置、车架、液压系统和电气系统等组成,而车架作为叉车的关键部件,主要由左箱体、右箱体、尾架和发动机支架等零部件组焊而成。而左右箱体也是组焊件,结构对称,箱体的主要组成零件部有:油箱、连接板、挡泥板、尾板和筋板。
2、现有生产技术中,叉车油箱焊接生产过程是半自动化方式,前道工序利用模具将外壁板、内壁板、踏板和油管等零件组焊成油箱,各零件间通过点焊方式固定,该油箱是半成品,还需要对零件焊缝进行满焊,保证油箱密封性,然后将组焊好的油箱输送到油箱焊接工位,操作者将油箱吊装到模具上,启动焊接机器人进行焊接。焊接完成后,操作者将油箱从模具上卸下,输送到下道工序,对油箱进行密封性检查,油箱焊接前的上料、在模具上的装夹、启动焊接机器人和焊好油箱的下料过程,都依靠人工操作,一次只能焊接一副油箱,使得生产过程变慢,效率低下,而且操作者劳动强度大,费时费力。
技术实现思路
1、本实用新型的目的在于提供一种叉车油箱自动化焊接装置,解决现有技术中半自动化方式,一次只能焊接一副油箱,使得生产过程变慢,效率低下,而且操作者劳动强度大,费时费力的问题。
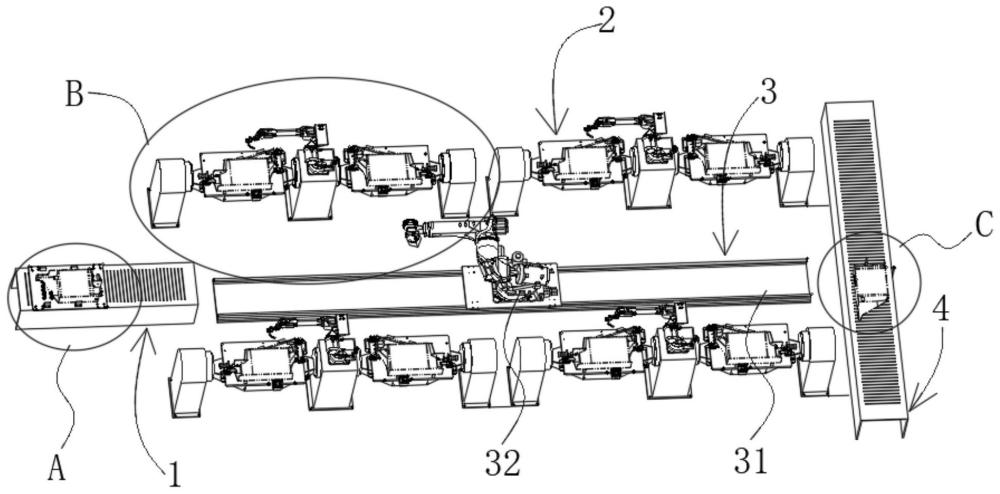
2、为实现上述目的,本实用新型提供如下技术方案:一种叉车油箱自动化焊接装置,包括:
3、上料机构;
4、设于上料机构旁用于对左油箱和右油箱进行焊接的多个焊接机构,
5、设于多个焊接机构之间的搬运机构,所述上料机构用于将工件输送至搬运机构方便搬运的位置,所述搬运机构将上料机构上的工件搬运至焊接机构上,以及
6、设于多个焊接机构旁的下料机构,所述搬运机构将焊接好的工件搬运至下料机构上,所述下料机构将焊接好的工件输送至下一工位。
7、优选的,所述上料机构包括第一输送板链,所述第一输送板链顶部设置有油箱定位台,所述油箱定位台上安装有第一检测传感器。
8、优选的,所述焊接机构包括两个变位机头架,两个所述变位机头架之间设置有变位机尾架,其中一个所述变位机头架与所述变位机尾架之间设置有右焊接模具,另一个所述变位机头架与所述变位机尾架之间设置有左焊接模具。
9、优选的,所述变位机尾架的顶部设置有焊接机器人。
10、优选的,所述搬运机构包括行走地轨,所述行走地轨设置在多个所述焊接机构之间,所述行走地轨顶部滑动连接有搬运机器人。
11、优选的,所述焊接机构的数量为四个,所述行走地轨两侧分别分布有两个焊接机构。
12、优选的,所述下料机构包括第二输送板链,所述第二输送板链顶部安装有第二检测传感器。
13、由上述技术方案可知,本实用新型具有如下有益效果:
14、该叉车油箱自动化焊接装置,通过设置用于对左油箱和右油箱进行焊接的多个焊接机构,设置搬运机构,上料机构的作用在于将工件输送至搬运机构方便搬运的位置,搬运机构将上料机构上的工件搬运至焊接机构上,设置下料机构,搬运机构将焊接好的工件搬运至下料机构上,下料机构将焊接好的工件输送至下一工位,全过程自动化,效率高,解决了现有生产技术中,叉车油箱焊接生产过程是半自动化方式,前道工序利用模具将外壁板、内壁板、踏板和油管等零件组焊成油箱,各零件间通过点焊方式固定,该油箱是半成品,还需要对零件焊缝进行满焊,保证油箱密封性,然后将组焊好的油箱输送到油箱焊接工位,操作者将油箱吊装到模具上,启动焊接机器人进行焊接,焊接完成后,操作者将油箱从模具上卸下,输送到下道工序,对油箱进行密封性检查,油箱焊接前的上料、在模具上的装夹、启动焊接机器人和焊好油箱的下料过程,都依靠人工操作,一次只能焊接一副油箱,使得生产过程变慢,效率低下,而且操作者劳动强度大,费时费力的问题。
技术特征:
1.一种叉车油箱自动化焊接装置,其特征在于,包括:
2.根据权利要求1所述的一种叉车油箱自动化焊接装置,其特征在于:所述上料机构(1)包括第一输送板链(11),所述第一输送板链(11)顶部设置有油箱定位台(12),所述油箱定位台(12)上安装有第一检测传感器(13)。
3.根据权利要求1所述的一种叉车油箱自动化焊接装置,其特征在于:所述焊接机构(2)包括两个变位机头架(21),两个所述变位机头架(21)之间设置有变位机尾架(22),其中一个所述变位机头架(21)与所述变位机尾架(22)之间设置有右焊接模具(23),另一个所述变位机头架(21)与所述变位机尾架(22)之间设置有左焊接模具(24)。
4.根据权利要求3所述的一种叉车油箱自动化焊接装置,其特征在于:所述变位机尾架(22)的顶部设置有焊接机器人(25)。
5.根据权利要求1所述的一种叉车油箱自动化焊接装置,其特征在于:所述搬运机构(3)包括行走地轨(31),所述行走地轨(31)设置在多个所述焊接机构(2)之间,所述行走地轨(31)顶部滑动连接有搬运机器人(32)。
6.根据权利要求5所述的一种叉车油箱自动化焊接装置,其特征在于:所述焊接机构(2)的数量为四个,所述行走地轨(31)两侧分别分布有两个焊接机构(2)。
7.根据权利要求1所述的一种叉车油箱自动化焊接装置,其特征在于:所述下料机构(4)包括第二输送板链(41),所述第二输送板链(41)顶部安装有第二检测传感器(42)。
技术总结
本技术公开了一种叉车油箱自动化焊接装置,包括上料机构,设于上料机构旁用于对左油箱和右油箱进行焊接的多个焊接机构,设于多个焊接机构之间的搬运机构,所述上料机构用于将工件输送至搬运机构方便搬运的位置,所述搬运机构将上料机构上的工件搬运至焊接机构上;该叉车油箱自动化焊接装置,全过程自动化,效率高,解决了现有生产技术中,叉车油箱焊接生产过程是半自动化方式,操作者将油箱从模具上卸下,输送到下道工序,油箱焊接前的上料、在模具上的装夹、启动焊接机器人和焊好油箱的下料过程,都依靠人工操作,一次只能焊接一副油箱,使得生产过程变慢,效率低下,而且操作者劳动强度大,费时费力的问题。
技术研发人员:程双灵,杨昌新
受保护的技术使用者:安徽好运机械有限公司
技术研发日:20230804
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!