链条套筒与滚子装配的设备的制作方法
本技术涉及链条装配,特别是涉及一种链条套筒与滚子装配的设备。
背景技术:
1、链条传动是机械传动的一种重要形式。传动链条一般采用套筒滚子链,由内链板、外链板、套筒和滚子组成。销轴与外链板、套筒与内链板均是过盈配合。
2、在链条装配过程中,每一节链条都会涉及到滚子与套筒的装配。目前在链条生产过程中,滚子与套筒的装配中多为人工将套筒与内链板先进行压装,套筒与内链板的压装完成后,再由人工将滚子套在套筒上,这种常规的装配方式生产效率相对较慢,也存在安全隐患。
技术实现思路
1、本实用新型要解决的技术问题是提供一种自动化程度高、能够提高装配效率和安全性的链条套筒与滚子装配的设备。
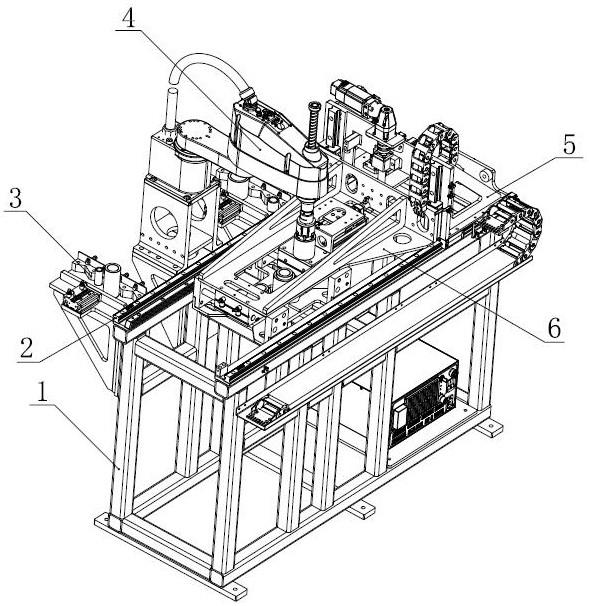
2、本实用新型链条套筒与滚子装配的设备,包括水平移动台和上下移动台,上下移动台上安装有节距调整台,节距调整台包括调节手柄和调节块,调节块上安装有对中夹爪,对中夹爪用于夹持套筒,调节手柄能够带动至少一个调节块和对中夹爪运动,对中夹爪的上端面作为滚子的定位面。
3、本实用新型链条套筒与滚子装配的设备,其中还包括机架,机架上安装有水平导轨,水平移动台活动安装在水平导轨上。
4、本实用新型链条套筒与滚子装配的设备,其中所述对中夹爪下方设置有平台,平台作为底座,能够与套筒的底面相接触。
5、本实用新型链条套筒与滚子装配的设备,其中所述机架的一侧固定安装有机器人系统、滚子定位台和套筒定位台。
6、本实用新型链条套筒与滚子装配的设备,其中所述滚子定位台和套筒定位台分别位于机器人系统的两侧。
7、本实用新型链条套筒与滚子装配的设备,其中所述机器人系统包括三抓,三抓能够分别拾取套筒和滚子。
8、本实用新型链条套筒与滚子装配的设备,其中所述三抓采用阶梯式手指。
9、本实用新型链条套筒与滚子装配的设备与现有技术不同之处在于,本实用新型链条套筒与滚子装配的设备能够完成滚子与套筒的装配,且能够通过组装好的滚子和套筒,整体对下一步压装进行精确上料,提升了内链节的装配效率,对满足套筒与内链板的自动压装提供条件,在整个装配过程中提高了产品的稳定性和安全性,改善了工作环境,提高了自动化水平。
10、下面结合附图对本实用新型的链条套筒与滚子装配的设备作进一步说明。
技术特征:
1.一种链条套筒与滚子装配的设备,其特征在于:包括水平移动台和上下移动台,上下移动台上安装有节距调整台,节距调整台包括调节手柄和调节块,调节块上安装有对中夹爪,对中夹爪用于夹持套筒,调节手柄能够带动至少一个调节块和对中夹爪运动,对中夹爪的上端面作为滚子的定位面。
2.根据权利要求1所述的链条套筒与滚子装配的设备,其特征在于:还包括机架,机架上安装有水平导轨,水平移动台活动安装在水平导轨上。
3.根据权利要求1所述的链条套筒与滚子装配的设备,其特征在于:所述对中夹爪下方设置有平台,平台作为底座,能够与套筒的底面相接触。
4.根据权利要求2所述的链条套筒与滚子装配的设备,其特征在于:所述机架的一侧固定安装有机器人系统、滚子定位台和套筒定位台。
5.根据权利要求4所述的链条套筒与滚子装配的设备,其特征在于:所述滚子定位台和套筒定位台分别位于机器人系统的两侧。
6.根据权利要求4所述的链条套筒与滚子装配的设备,其特征在于:所述机器人系统包括三抓,三抓能够分别拾取套筒和滚子。
7.根据权利要求6所述的链条套筒与滚子装配的设备,其特征在于:所述三抓采用阶梯式手指。
技术总结
本技术链条套筒与滚子装配的设备涉及一种用于链条装配的设备。其目的是为了提供一种自动化程度高、能够提高装配效率和安全性的链条套筒与滚子装配的设备。本技术链条套筒与滚子装配的设备包括水平移动台和上下移动台,上下移动台上安装有节距调整台,节距调整台包括调节手柄和调节块,调节块上安装有对中夹爪,对中夹爪用于夹持套筒,调节手柄能够带动至少一个调节块和对中夹爪运动,对中夹爪的上端面作为滚子的定位面。本技术链条套筒与滚子装配的设备能够完成滚子与套筒的装配,且能够通过组装好的滚子和套筒,整体对下一步压装进行精确上料,在整个装配过程中提高了产品的稳定性和安全性,改善了工作环境,提高了自动化水平。
技术研发人员:刘庆海,康运江,孙继东,范晓杰,王顺利,林通
受保护的技术使用者:机科发展科技股份有限公司
技术研发日:20230809
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!