一种智能扫地机器人加工用自动螺丝机的制作方法
本技术涉及扫地机器人加工,尤其涉及一种智能扫地机器人加工用自动螺丝机。
背景技术:
1、智能扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,指的是能凭借一定的人工智能,自动在房间内完成地板清洁工作的机器人,是智能家用电器的一种,在智能扫地机器人的生产加工过程中,需要智能扫地机器人进行组装,组装一般采用螺丝将零部件组合,现有技术中一般采用人工手持电批来进行螺与零件的加装组合,这种方式长时间的劳作会对工作者产生较大的疲劳,且在组装过程中电批从手中滑落会对工作者的人身安全产生危害,实用性较低。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种智能扫地机器人加工用自动螺丝机。
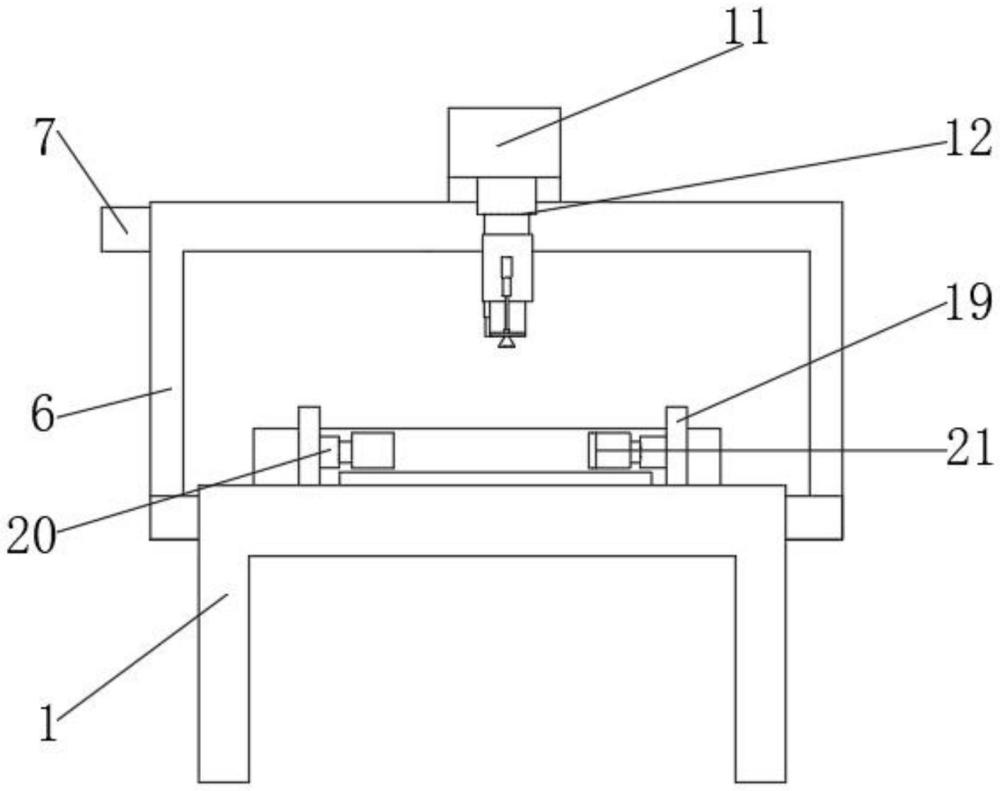
2、为了实现上述目的,本实用新型采用了如下技术方案:一种智能扫地机器人加工用自动螺丝机,包括机体,所述机体的上方设置有支撑臂,所述支撑臂的下表面固定连接有电动伸缩杆一,所述电动伸缩杆一的输出端固定连接有机械臂,所述机械臂的外壁一侧固定连接有视觉检查组件,所述机械臂的外壁另一侧固定连接有电批,所述电批的输出端固定连接有电批头,所述电批头的一端转动连接在固定座的内壁,所述固定座的一端固定连接有吸嘴。
3、作为上述技术方案的进一步描述:
4、所述机体外壁两侧开设有滑槽,所述滑槽的内壁滑动连接有承重块,所述滑槽的内壁一侧固定连接有电动液压杆,所述电动液压杆的输出端固定连接在承重块的外壁一侧中部,所述承重块的上表面固定连接有支撑体。
5、作为上述技术方案的进一步描述:
6、所述支撑体的上表面开设有凹槽,所述支撑体的外壁一侧固定连接有旋转电机,所述旋转电机的输出端固定连接有丝杆,所述丝杆的一端转动连接在凹槽的内壁中部。
7、作为上述技术方案的进一步描述:
8、所述丝杆的外壁螺纹连接有滑块,所述滑块上表面固定连接在支撑臂的下表面一侧。
9、作为上述技术方案的进一步描述:
10、所述机体的上表面中部固定连接有工作台,所述工作台的两侧设置有支撑板,所述支撑板的下表面固定连接在机体的上表面,所述支撑板的外壁一侧固定连接有电动伸缩杆二,所述电动伸缩杆二的输出端固定连接有夹持组件。
11、作为上述技术方案的进一步描述:
12、所述机体的上表面后侧固定连接有丝钉供料机。
13、作为上述技术方案的进一步描述:
14、所述夹持组件滑动连接在工作台的上表面。
15、作为上述技术方案的进一步描述:
16、所述吸嘴为平顶圆锥形状,所述吸嘴的上端与固定座相通。
17、本实用新型具有如下有益效果:
18、1、本实用新型中,通过启动电动伸缩杆一,使得机械臂带动电批的运动,通过视觉检查组件可对零件上方的螺孔进行确认,通过启动电批使得电批头开始转动进而可使螺钉与零件快速组合,固定座可辅助电批头的运作,使得在其工作不会产生偏移,此装置解决了人工长时间手动操作电批打螺丝所产生的疲劳,减轻了强度,同时提高了生产效率。
技术特征:
1.一种智能扫地机器人加工用自动螺丝机,包括机体(1),其特征在于:所述机体(1)的上方设置有支撑臂(11),所述支撑臂(11)的下表面固定连接有电动伸缩杆一(12),所述电动伸缩杆一(12)的输出端固定连接有机械臂(13),所述机械臂(13)的外壁一侧固定连接有视觉检查组件(14),所述机械臂(13)的外壁另一侧固定连接有电批(15),所述电批(15)的输出端固定连接有电批头(16),所述电批头(16)的一端转动连接在固定座(17)的内壁,所述固定座(17)的一端固定连接有吸嘴(18)。
2.根据权利要求1所述的一种智能扫地机器人加工用自动螺丝机,其特征在于:所述机体(1)外壁两侧开设有滑槽(3),所述滑槽(3)的内壁滑动连接有承重块(4),所述滑槽(3)的内壁一侧固定连接有电动液压杆(5),所述电动液压杆(5)的输出端固定连接在承重块(4)的外壁一侧中部,所述承重块(4)的上表面固定连接有支撑体(6)。
3.根据权利要求2所述的一种智能扫地机器人加工用自动螺丝机,其特征在于:所述支撑体(6)的上表面开设有凹槽(9),所述支撑体(6)的外壁一侧固定连接有旋转电机(7),所述旋转电机(7)的输出端固定连接有丝杆(8),所述丝杆(8)的一端转动连接在凹槽(9)的内壁中部。
4.根据权利要求3所述的一种智能扫地机器人加工用自动螺丝机,其特征在于:所述丝杆(8)的外壁螺纹连接有滑块(10),所述滑块(10)上表面固定连接在支撑臂(11)的下表面一侧。
5.根据权利要求1所述的一种智能扫地机器人加工用自动螺丝机,其特征在于:所述机体(1)的上表面中部固定连接有工作台(2),所述工作台(2)的两侧设置有支撑板(19),所述支撑板(19)的下表面固定连接在机体(1)的上表面,所述支撑板(19)的外壁一侧固定连接有电动伸缩杆二(20),所述电动伸缩杆二(20)的输出端固定连接有夹持组件(21)。
6.根据权利要求1所述的一种智能扫地机器人加工用自动螺丝机,其特征在于:所述机体(1)的上表面后侧固定连接有丝钉供料机(22)。
7.根据权利要求5所述的一种智能扫地机器人加工用自动螺丝机,其特征在于:所述夹持组件(21)滑动连接在工作台(2)的上表面。
8.根据权利要求1所述的一种智能扫地机器人加工用自动螺丝机,其特征在于:所述吸嘴(18)为平顶圆锥形状,所述吸嘴(18)的上端与固定座(17)相通。
技术总结
本技术涉及扫地机器人加工技术领域,公开了一种智能扫地机器人加工用自动螺丝机,包括机体,所述机体的上方设置有支撑臂,所述支撑臂的下表面固定连接有电动伸缩杆一,所述电动伸缩杆一的输出端固定连接有机械臂,所述机械臂的外壁一侧固定连接有视觉检查组件。本技术中,通过启动电动伸缩杆一,使得机械臂带动电批的运动,通过视觉检查组件可对零件上方的螺孔进行确认,通过启动电批使得电批头开始转动进而可使螺钉与零件快速组合,固定座可辅助电批头的运作,使得在其工作不会产生偏移,此装置解决了人工长时间手动操作电批打螺丝所产生的疲劳,减轻了强度,同时提高了生产效率。
技术研发人员:赵金强
受保护的技术使用者:苏州瀚博精密模塑科技有限公司
技术研发日:20230810
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!