一种工业机器人视觉寻位制造用焊接设备的制作方法
本技术涉及焊接设备,具体为一种工业机器人视觉寻位制造用焊接设备。
背景技术:
1、工业机器人视觉寻位制造用焊接设备可以提高焊接过程的自动化程度和生产效率,减少人工操作的需求,并提高焊接质量和一致性,它在汽车制造、航空航天、电子制造等领域具有广泛的应用前景。
2、在公告号为cn219151927u的中国实用新型专利中公开了一种应用于钢拱架生产的视觉寻位装置,在正常生产时,当工字钢与连接板贴合后,机器人将焊接视觉装置移到系统锚定的焊接视觉标靶位置,视觉系统对工字钢焊缝进行拍照,获取焊缝二端点位置坐标,并与系统中锚定的焊缝二端点位置坐标进行对比,获得位置变动参数后,参数发送给焊接机器人,焊接机器人根据接收到的位置变动参数运行焊枪进行焊接,如此,焊接机器人就可以根据新的焊缝位置精准进行焊接。
3、针对上述中的相关技术,存在以下缺陷:现有的工业机器人制造用焊接设备焊枪头部是经常接触焊接材料,长时间使用会导致磨损,造成焊接点不牢固或者产生气孔,由于现有设备中焊接头是固定连接的,导致不方便更换焊枪头。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种工业机器人视觉寻位制造用焊接设备,具备拉动把手,带动限位杆从限位凹槽的内部脱离接触,第一弹簧伸长,推动卡块移动到第一内腔的一端,方便拆卸焊枪本体和将限位杆插接进限位凹槽的内部,避免焊枪本体在固定柱的内部转动偏移的优点,解决了现有的工业机器人制造用焊接设备焊枪头部是经常接触焊接材料,长时间使用会导致磨损,造成焊接点不牢固或者产生气孔,由于现有设备中焊接头是固定连接的,导致不方便更换焊枪头的问题。
3、(二)技术方案
4、为实现上述方便拆除安装焊枪本体的目的,本实用新型提供如下技术方案:.一种工业机器人视觉寻位制造用焊接设备,包括焊枪本体和固定柱,所述焊枪本体的一端固定式连接有焊枪口,所述焊枪本体的另一端固定式连接有卡块,所述焊枪本体的一侧加工有限位凹槽,所述焊枪本体活动式连接在固定柱的内部,所述固定柱的一端固定式连接有连接板,所述固定柱的内部加工有第一内腔,所述卡块的外部活动式连接在第一内腔的内部,所述第一内腔的一端顶部铰接式连接有挡板。
5、优选的,所述固定柱的内部加工有第二内腔,所述第二内腔和第一内腔相联通,所述卡块的外部活动式连接在第二内腔的内部,所述第二内腔的内部设置有第一弹簧。
6、优选的,所述第二内腔的一侧内壁固定式连接有第一弹簧,所述第一弹簧的一端固定式连接有第一推板。
7、优选的,所述第一推板活动式连接在第二内腔的内部,所述第一推板的一侧与卡块的一侧相贴合。
8、优选的,所述固定柱的内部活动式连接有限位杆,所述限位杆的一端插接式连接在限位凹槽的内部,所述限位杆的一端固定式连接有把手。
9、优选的,所述固定柱的内部加工有第三内腔,所述限位杆的一侧固定式连接有第二推板,所述第三内腔的内部设置有第二弹簧。
10、优选的,所述第三内腔的一侧内壁与第二弹簧的一端固定式,所述第二弹簧的另一端与第二推板的一侧固定式连接,所述第二推板的外部活动式连接在第三内腔的内部。
11、(三)有益效果
12、与现有技术相比,本实用新型提供了一种工业机器人视觉寻位制造用焊接设备,具备以下有益效果:
13、一、该工业机器人视觉寻位制造用焊接设备,通过拉动把手,带动限位杆活动,当限位杆的一端从限位凹槽的内部脱离接触后,第二内腔内部的第一弹簧将伸长,推动第一推板和卡块移动,卡块将移动到第一内腔的一端,方便拆卸焊枪本体。
14、二、该工业机器人视觉寻位制造用焊接设备,通过将焊枪本体的插接进固定柱的内部,当卡块与第一内腔的内端内壁接触时,转动焊枪本体,带动卡块在第二内腔的内部活动,当限位杆的一端位于限位凹槽的外部时,第二弹簧伸长,限位杆将插接进限位凹槽的内部,从而对焊枪本体进行固定,避免焊枪本体在固定柱的内部转动偏移。
技术特征:
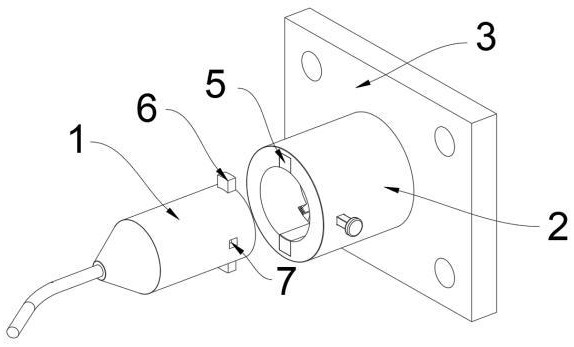
1.一种工业机器人视觉寻位制造用焊接设备,包括焊枪本体(1)和固定柱(2),其特征在于:所述焊枪本体(1)的一端固定式连接有焊枪口(4),所述焊枪本体(1)的另一端固定式连接有卡块(6),所述焊枪本体(1)的一侧加工有限位凹槽(7),所述焊枪本体(1)活动式连接在固定柱(2)的内部,所述固定柱(2)的一端固定式连接有连接板(3),所述固定柱(2)的内部加工有第一内腔(8),所述卡块(6)的外部活动式连接在第一内腔(8)的内部,所述第一内腔(8)的一端顶部铰接式连接有挡板(5)。
2.根据权利要求1所述的一种工业机器人视觉寻位制造用焊接设备,其特征在于:所述固定柱(2)的内部加工有第二内腔(9),所述第二内腔(9)和第一内腔(8)相联通,所述卡块(6)的外部活动式连接在第二内腔(9)的内部,所述第二内腔(9)的内部设置有第一弹簧(11)。
3.根据权利要求2所述的一种工业机器人视觉寻位制造用焊接设备,其特征在于:所述第二内腔(9)的一侧内壁固定式连接有第一弹簧(11),所述第一弹簧(11)的一端固定式连接有第一推板(10)。
4.根据权利要求3所述的一种工业机器人视觉寻位制造用焊接设备,其特征在于:所述第一推板(10)活动式连接在第二内腔(9)的内部,所述第一推板(10)的一侧与卡块(6)的一侧相贴合。
5.根据权利要求1所述的一种工业机器人视觉寻位制造用焊接设备,其特征在于:所述固定柱(2)的内部活动式连接有限位杆(13),所述限位杆(13)的一端插接式连接在限位凹槽(7)的内部,所述限位杆(13)的一端固定式连接有把手(12)。
6.根据权利要求5所述的一种工业机器人视觉寻位制造用焊接设备,其特征在于:所述固定柱(2)的内部加工有第三内腔(14),所述限位杆(13)的一侧固定式连接有第二推板(15),所述第三内腔(14)的内部设置有第二弹簧(16)。
7.根据权利要求6所述的一种工业机器人视觉寻位制造用焊接设备,其特征在于:所述第三内腔(14)的一侧内壁与第二弹簧(16)的一端固定式,所述第二弹簧(16)的另一端与第二推板(15)的一侧固定式连接,所述第二推板(15)的外部活动式连接在第三内腔(14)的内部。
技术总结
本技术涉及焊接设备技术领域,且公开了一种工业机器人视觉寻位制造用焊接设备,包括焊枪本体和固定柱,焊枪本体的一端固定式连接有焊枪口,焊枪本体的另一端固定式连接有卡块,焊枪本体的一侧加工有限位凹槽,焊枪本体活动式连接在固定柱的内部,固定柱的一端固定式连接有连接板,固定柱的内部加工有第一内腔,卡块的外部活动式连接在第一内腔的内部,第一内腔的一端顶部铰接式连接有挡板,通过拉动把手,带动限位杆从限位凹槽的内部脱离接触,第一弹簧伸长,推动卡块移动到第一内腔的一端,方便拆卸焊枪本体,通过将限位杆插接进限位凹槽的内部,避免焊枪本体在固定柱的内部转动偏移。
技术研发人员:谢伟程,谢伟鹏
受保护的技术使用者:合肥鹏锦智能装备有限公司
技术研发日:20230922
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!