一种机器人焊接固定夹具结构
本技术涉及机器人生产与制造领域,更具体地涉及一种机器人焊接固定夹具结构。
背景技术:
1、现有的机器人在生产与制造的过程中,需要对其进行焊接处理,在焊接时,需要通过夹持装置对机器人本体进行夹持固定,因此,需要提供一种机器人焊接固定夹具结构。
2、中国专利公开的一种拼装机器人焊接用夹具结构授权公告号cn212886006u该专利在使用时,将机器人居中置于座体上,通过推杆一端的推盘向内共同推动座体上端两侧的推杆,通过夹杆对座体上机器人的两侧外壁进行初步的夹持固定,再通过向下旋转立板上侧两端的限位轴,对限位杆进行进一步的旋压限位,进而完成机器人的夹持固定,然后对座体上的机器人进行相应的焊接处理,但是它在使用过程中会存在以下不足之处,在使用时,通过设置在座体上方的夹杆以及限位轴可以对机器人进行夹持固定,但仅能从机器人底部的两侧对机器人底部配件进行夹持固定,而机器人的顶部配件并未进行固定,易导致机器人顶部配件发生晃动,整个机器人固定效果较差,在焊接的过程中,会由于机器人顶部部件的晃动,而影响到机器人的焊接作业。
技术实现思路
1、为解决现有技术中的上述技术问题,本实用新型提供一种机器人焊接固定夹具结构。
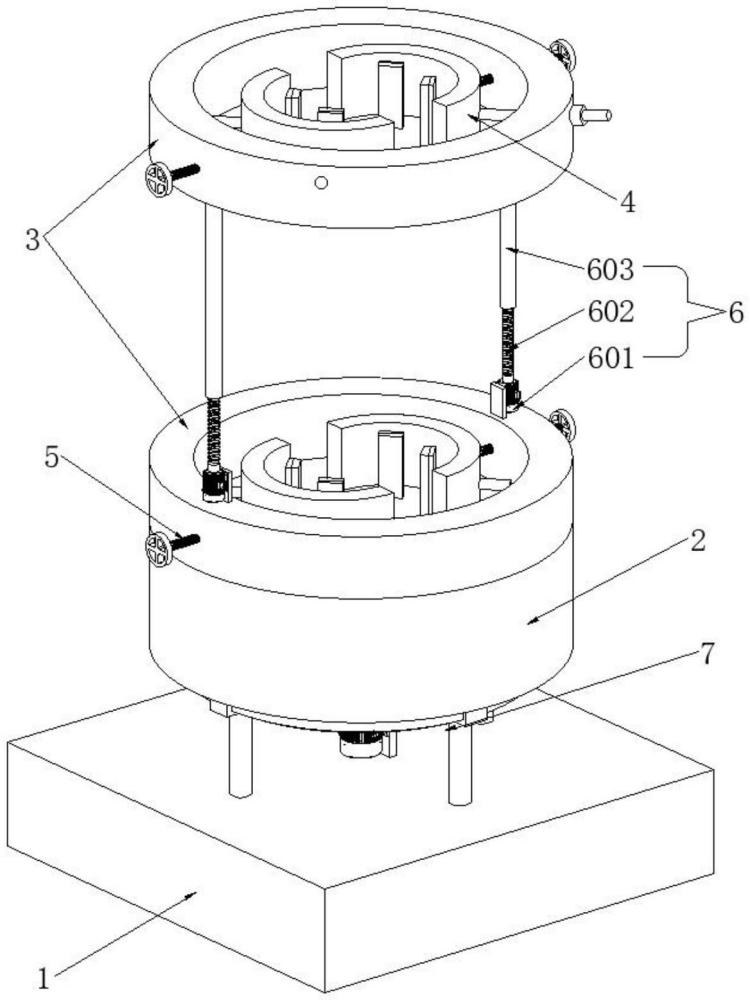
2、本实用新型采用的具体方案为:一种机器人焊接固定夹具结构,所述底座上方设置固定座,所述固定座上方设置第一固定环,所述第一固定环上方设置第二固定环,所述第一、第二固定环内部均对称设置夹持组件,所述夹持组件包括固定块,所述固定块上设置螺纹孔,所述螺纹孔中螺纹配合有固定杆,所述固定杆的一端与固定板转动连接,另一端穿出第一固定环或第二固定环的环体后,与限位螺母螺纹配合连接,所述转杆与转盘连接,所述转杆的表面设置螺纹,所述固定块上设置与转杆的螺纹配合,所述第一固定环的顶部与第二固定环的底部之间设置高度调节组件。
3、所述固定块的外壁与转杆的连接方式为固定连接。
4、所述高度调节组件包括设置在所述第一固定环上表面的第一电机以及设置在所述第二固定环下表面的套杆,所述第一电机的输出轴上设置有螺纹杆,所述套杆的内部中空且套杆的内表面成螺纹状,所述螺纹杆与套杆螺纹连接。
5、所述底座与固定座之间设置驱动组件,所述驱动组件包括第二电机、滑块、支撑杆,所述第二电机设置在所述底座的上表面,所述第二电机的输出端与所述固定座的底部连接,所述支撑杆设置在底座上,所述支撑杆底部设置环形滑道,所述滑块设置在所述固定座的底部,所述滑块与滑道滑动连接。
6、所述固定座的上表面开设有固定槽,所述固定槽为环形槽。
7、所述固定板前端设置橡胶垫。
8、本实用新型相对于现有技术具有如下有益效果:
9、本实用新型公开了一种机器人焊接固定夹具结构,包括底座,底座上方设置固定座,固定座上方设置第一固定环,第一固定环上方设置第二固定环,第一、第二固定环内均设置夹持组件,夹持组件包括对称设置的固定块,固定块上设置通孔,通孔中设置固定杆,固定杆的一端与固定板连接,该固定板设置在夹持组件内部,固定块的外壁与转杆一端连接,转杆与转盘连接。本实用新型在整个固定夹具结构的使用过程中,通过第一、第二固定环内部的两组夹持组件分别对机器人的底部配件以及顶部配件进行夹持固定,在焊接时,机器人的底部配件以及顶部配件均不会发生晃动,相比于传统的仅能够从机器人底部的两侧对机器人进行夹持固定,本实用新型提高了机器人的固定效果,同时还能通过高度调节组件,对两个固定环之间的间距进行调整,使得整个固定夹具结构可以适应不同尺寸大小机器人的夹持固定。
10、本实用新型在整个固定夹具结构的使用过程中,待机器人固定夹持好后,启动第二电机,通过第二电机的转动,使得滑块在环形滑道上发生滑动,并使得固定座发生转动,通过固定座的转动,使得机器人发生转动,可以对机器人的角度进行调整,便于后续机器人的焊接作业。
技术特征:
1.一种机器人焊接固定夹具结构,包括底座(1),其特征在于,所述底座(1)上方设置固定座(2),所述固定座(2)上方设置第一固定环(301),所述第一固定环(301)上方设置第二固定环(302),所述第一固定环(301)、第二固定环(302)内部均对称设置夹持组件(4),所述夹持组件(4)包括固定块(401),所述固定块(401)上设置螺纹孔(407),所述螺纹孔(407)中螺纹配合有固定杆(402),所述固定杆(402)的一端与固定板(403)转动连接,另一端穿出第一固定环(301)或第二固定环(302)的环体后,与限位螺母(406)螺纹配合连接,转杆(501)与转盘(502)连接,所述转杆(501)的表面设置螺纹,所述固定块(401)上设置与转杆(501)的螺纹配合,所述第一固定环(301)的顶部与第二固定环(302)的底部之间设置高度调节组件(6)。
2.根据权利要求1所述的机器人焊接固定夹具结构,其特征在于,所述固定块(401)的外壁与转杆(501)的连接方式为固定连接。
3.根据权利要求2所述的机器人焊接固定夹具结构,其特征在于,所述高度调节组件(6)包括设置在所述第一固定环(301)上表面的第一电机(601)以及设置在所述第二固定环(302)下表面的套杆(603),所述第一电机(601)的输出轴上设置有螺纹杆(602),所述套杆(603)的内部中空且套杆(603)的内表面成螺纹状,所述螺纹杆(602)与套杆(603)螺纹连接。
4.根据权利要求1所述的机器人焊接固定夹具结构,其特征在于,所述底座(1)与固定座(2)之间设置驱动组件(7),所述驱动组件(7)包括第二电机(701)、滑块(704)、支撑杆(702),所述第二电机(701)设置在所述底座(1)的上表面,所述第二电机(701)的输出端与所述固定座(2)的底部连接,所述支撑杆(702)设置在底座(1)上,所述支撑杆(702)底部设置环形滑道(703),所述滑块(704)设置在所述固定座(2)的底部,所述滑块(704)与滑道(703)滑动连接。
5.根据权利要求1所述的机器人焊接固定夹具结构,其特征在于,所述固定座(2)的上表面开设有固定槽(201),所述固定槽(201)为环形槽。
6.根据权利要求1所述的机器人焊接固定夹具结构,其特征在于,所述固定板(403)前端设置橡胶垫(405)。
技术总结
本技术涉及机器人生产与制造领域,公开了一种机器人焊接固定夹具结构,底座上方设置固定座,固定座上方设置第一固定环,第一固定环上方设置第二固定环,第一、第二固定环内部均对称设置夹持组件,夹持组件包括固定块,固定块上设置螺纹孔,螺纹孔中螺纹配合有固定杆,固定杆一端与固定板转动连接,另一端穿出第一固定环或第二固定环的环体后,与限位螺母螺纹配合连接,转杆与转盘连接,固定块上设置与转杆的螺纹配合,第一固定环的顶部与第二固定环的底部之间设置高度调节组件。解决了现有技术机器人焊接固定夹具结构仅能从机器人底部的两侧对机器人底部配件进行夹持固定,而机器人顶部配件并未进行固定,导致机器人顶部配件发生晃动的问题。
技术研发人员:杨恋,李云峰,陶毅然,雷邻洋,孙槐泽,徐诗洋
受保护的技术使用者:哈尔滨理工大学
技术研发日:20231019
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!