一种深孔抓取锁紧的智能手爪装置的制作方法
本申请涉及辅助钢瓶灌装的,特别是一种深孔抓取锁紧的智能手爪装置。
背景技术:
1、在制冷剂包装行业,目前绝大部分企业依旧采用人工操作,劳动强度大,效率低,而且在生产过程中对操作工人有造成人身伤害的危险因素、安全风险高。随着制冷行业的迅速发展,对制冷剂的需求进一步扩大,各厂商为降低工人的安全风险以及生产成本,都在积极研制制冷剂自动包装设备。但由于制冷剂钢瓶种类规格多,加工精度低,导致很难实现自动化灌装生产,其中制冷剂钢瓶上的阀帽锁紧与拆卸就是关键难点之一,由于阀帽通常位于深孔内部,人工操作困难,且容易发生误操作,导致产品质量不稳定。因此,急需一种能够自动、准确、稳定地进行阀帽锁紧与拆卸的设备。
技术实现思路
1、针对现有技术存在的上述技术问题,本申请提供一种深孔快速抓取、锁紧与拆卸一体的多功能机械手爪装置,可广泛应用在自动包装、机械手锁紧、拆卸、抓取等设备上。
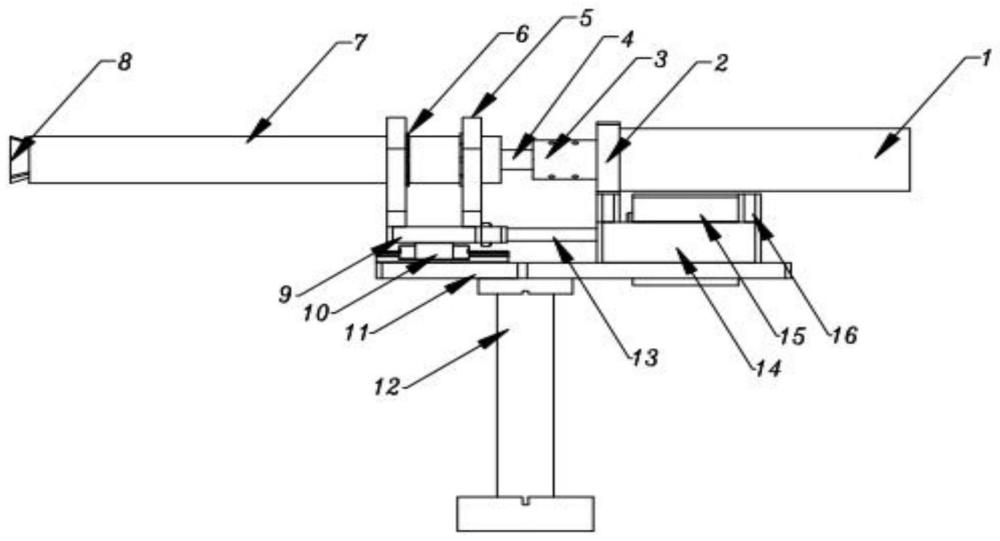
2、本申请提出了一种深孔抓取锁紧的智能手爪装置,包括手爪安装底板11,手爪安装底板11的表面设有连接法兰12;所述手爪安装底板11相对于连接法兰12的另一侧同轴设有第一动力部件1和夹紧套7,第一动力部件1的动力输出轴通过联轴器3和旋转轴4连接,旋转轴4与夹紧套7同轴设置,旋转轴4另一端与弹性夹具8的呈梯形柱状的夹具基部81连接,夹紧套7相对于第一动力部件1的另一端的内径由外向内逐渐缩小并与夹具基部81的外径相匹配,弹性夹具8的夹头82凸设于夹紧套7外;夹紧套7贯穿旋转轴承6进而固设于夹紧套安装板5,夹紧套安装板5通过导轨滑块10、滑块连接板9滑动设于手爪安装底板11表面的滑轨;手爪安装底板11上还设有标准气缸15,标准气缸15通过气缸连接杆13与滑块连接板9连接。
3、特别的,所述第一动力部件1选自气动马达、伺服电机、液压马达。
4、特别的,所述第一动力部件1通过第一动力部件安装板2固设于手爪安装底板11上。
5、特别的,所述标准气缸15与手爪安装底板11间设有垫高块14。
6、特别的,所述手爪装置通过连接法兰12与载具18连接。
7、在符合本领域常识的基础上,上述各优选条件可任意组合,即得本申请各优选实例。
8、上述技术方案具有如下优点或有益效果:本申请提供一种深孔快速抓取、锁紧与拆卸一体的多功能机械手爪装置,可广泛应用在自动包装、机械手锁紧、拆卸、抓取等设备上,实现了制冷剂钢瓶阀帽的自动化抓取、拆卸与锁紧等功能。本机构结构简单、运行稳定可靠,不仅提升了生产效率,并解决了制冷剂自动包装行业设备了自动化生产。当然,本申请的任一技术方案并不一定同时达到以上所述的所有优点。
技术特征:
1.一种深孔抓取锁紧的智能手爪装置,包括手爪安装底板(11),其特征在于:手爪安装底板(11)的表面设有连接法兰(12);所述手爪安装底板(11)相对于连接法兰(12)的另一侧同轴设有第一动力部件(1)和夹紧套(7),第一动力部件(1)的动力输出轴通过联轴器(3)和旋转轴(4)连接,旋转轴(4)与夹紧套(7)同轴设置,旋转轴(4)另一端与弹性夹具(8)的呈梯形柱状的夹具基部(81)连接,夹紧套(7)相对于第一动力部件(1)的另一端的内径由外向内逐渐缩小并与夹具基部(81)的外径相匹配,弹性夹具(8)的夹头(82)凸设于夹紧套(7)外;夹紧套(7)贯穿旋转轴承(6)进而固设于夹紧套安装板(5),夹紧套安装板(5)通过导轨滑块(10)、滑块连接板(9)滑动设于手爪安装底板(11)表面的滑轨;手爪安装底板(11)上还设有标准气缸(15),标准气缸(15)通过气缸连接杆(13)与滑块连接板(9)连接。
2.根据权利要求1所述的一种深孔抓取锁紧的智能手爪装置,其特征在于:第一动力部件(1)选自气动马达、伺服电机、液压马达。
3.根据权利要求1所述的一种深孔抓取锁紧的智能手爪装置,其特征在于:所述第一动力部件(1)通过第一动力部件安装板(2)固设于手爪安装底板(11)上。
4.根据权利要求1所述的一种深孔抓取锁紧的智能手爪装置,其特征在于:所述标准气缸(15)与手爪安装底板(11)间设有垫高块(14)。
5.根据权利要求1所述的一种深孔抓取锁紧的智能手爪装置,其特征在于:所述手爪装置通过连接法兰(12)与载具(18)连接。
技术总结
本申请涉及辅助钢瓶灌装的技术领域,特别是一种深孔抓取锁紧的智能手爪装置,包括手爪安装底板表面设有的连接法兰,相对于连接法兰的另一侧同轴设有第一动力部件和夹紧套,夹紧套贯穿旋转轴承进而固设于夹紧套安装板,夹紧套安装板通过导轨滑块、滑块连接板滑动设于手爪安装底板的表面,还设有标准气缸,其通过气缸连接杆与滑块连接板连接,夹紧套的一端内径与弹性夹头的一端外径设有相应匹配的锥度,弹性夹头的另一端与待拆卸的工件连接。本申请的手爪装置结构简单,运行稳定,可以直接安装在如工业机械臂、伺服模组等设备上,实现快速抓取、拆卸、锁紧等动作。
技术研发人员:方迅,余升昇,张明,江航,李乐,袁开平
受保护的技术使用者:浙江巨化装备工程集团有限公司
技术研发日:20231101
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!