自动聚焦激光打标机器人的制作方法
本技术涉及建筑加工,尤其涉及自动聚焦激光打标机器人。
背景技术:
1、在工程管道打标领域,在管道打标的实际应用中,由于管道的材料不同,管道标记不能永久保留,需要人工重复标记。作为管道、板材唯一身份的标识,传统的标记是采用手绘、喷涂方式表示的,这种方式很容易被涂改,这就使得源头的可追溯性变得很差,由于管道数量多,反复贴标,现场人员工作量大,加工效率低。
2、相对传统方式,激光打标技术是激光加工最大的应用领域之一,它利用高能晶密度的激光对工件进行局部照射,从而留下永久性标记的一种打标方法。采用激光打标技术做为加工手段,与打标物体之间没有加工力的作用,具有无接触,无切削力,热影响小的优点,保证了打标物的原有精度;并且激光的空间控制性和时间控制性很好,同时易于用软件设计标刻图样,提高加工效率,降低人工成本,降低工作强度,可以清晰地对所有打标物建立自己的“身份证”,通过数字化的管理有效提升后期运行管理效率。
技术实现思路
1、为了克服上述现有技术的缺陷,本实用新型的目的是提供自动聚焦激光打标机器人,来提高加工效率,降低人工成本,降低工作强度。
2、本实用新型是采取以下技术方案来实现的:
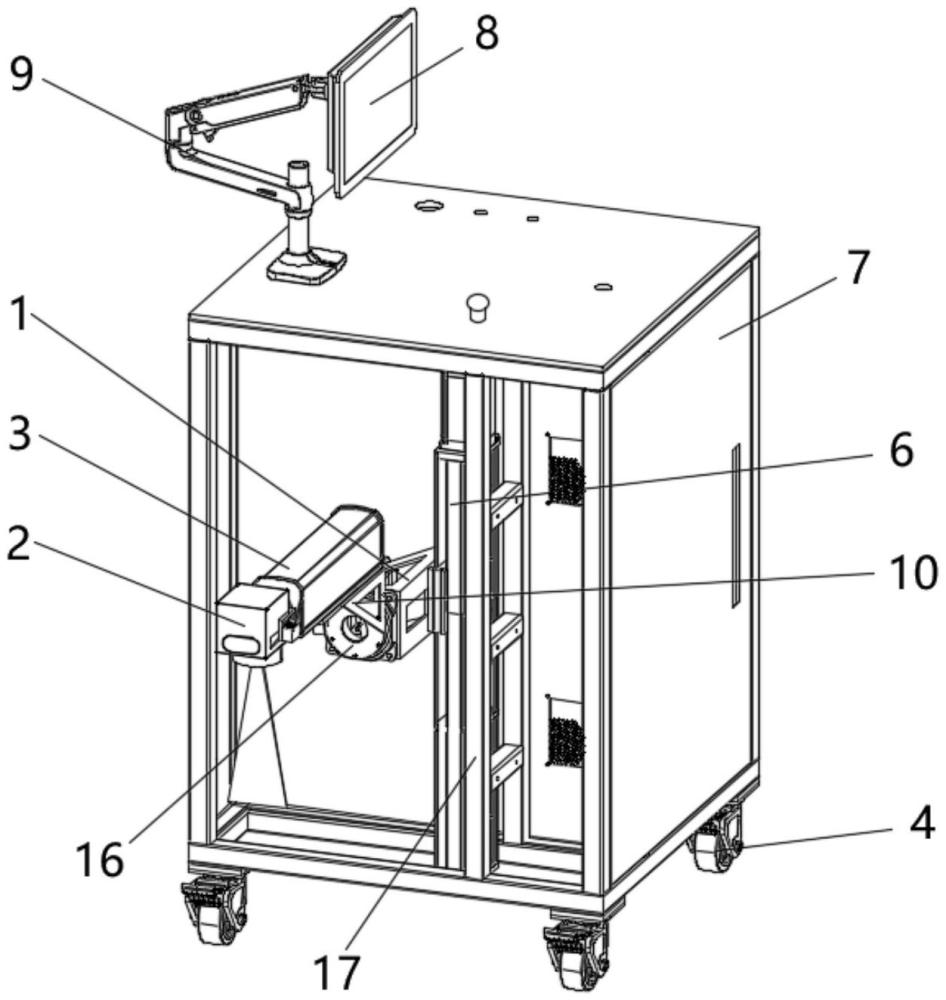
3、自动聚焦激光打标机器人,包括激光测距仪、光纤激光器、箱体、显示屏和工控机;所述箱体上设置有工控机,工控机上设置有显示屏;所述箱体内设置有竖向导轨;所述竖向导轨上设置有可进行上下移动的二轴位移装置;所述二轴位移装置上设置有360度旋转装置;所述光纤激光器固定在360度旋转装置上;所述光纤激光器前端设置有激光测距仪;所述工控机与激光测距仪、光纤激光器电性连接。
4、进一步的,所述二轴位移装置包括螺杆、轨道滑块、钢支架和内螺纹套筒;所述内螺纹套筒固定在竖向导轨中;所述螺杆设置在内螺纹套筒中;在竖向导轨两侧的滑槽中设置有轨道滑块;所述轨道滑块伸入滑槽中的部分固定在内螺纹套筒外表面;所述钢支架固定在两块轨道滑块同侧的侧面上。
5、进一步的,所述360度旋转装置包括伺服旋转减速电机、直角中空旋转平台和短支架;所述钢支架上沿垂直箱体的正面方向固定有伺服旋转减速电机;所述伺服旋转减速电机前端连接有直角中空旋转平台,伺服旋转减速电机驱动直角中空旋转平台旋转;所述直角中空旋转平台前端的侧面设置有一组短支架;所述光纤激光器固定在短支架上。
6、进一步的,所述螺杆的上端与驱动电机连接;所述驱动电机固定在箱体的内部上壁上。
7、进一步的,所述箱体内沿上下垂直方向上设置有连接架;所述竖向导轨固定在连接架上。
8、进一步的,所述箱体的底部设置有两组万向轮。
9、综上所述,本实用新型具有以下有益效果:通过启动工控机配套的光纤激光器发射高能量密度的激光对管道进行照射打标,打标架上一个方位的管道打标完成后,可以启动360度旋转装置控制光纤激光器旋转到其他的合适打标位置和距离后,对打标架上其他方位的管道进行打标,提高了加工效率,降低了劳动强度,同时管道上打标的二维码等信息标记,可以清晰地对所有打标物建立自己的“身份证”,通过数字化的管理有效提升后期运行管理效率。
技术特征:
1.自动聚焦激光打标机器人,包括激光测距仪、光纤激光器、箱体、显示屏和工控机;所述箱体上设置有工控机,工控机上设置有显示屏;所述箱体内设置有竖向导轨;其特征在于:所述竖向导轨上设置有可进行上下移动的二轴位移装置;所述二轴位移装置上设置有360度旋转装置;所述光纤激光器固定在360度旋转装置上;所述光纤激光器前端设置有激光测距仪;所述工控机与激光测距仪、光纤激光器电性连接。
2.根据权利要求1所述的自动聚焦激光打标机器人,其特征在于:所述二轴位移装置包括螺杆、轨道滑块、钢支架和内螺纹套筒;所述内螺纹套筒固定在竖向导轨中;所述螺杆设置在内螺纹套筒中;在竖向导轨两侧的滑槽中设置有轨道滑块;所述轨道滑块伸入滑槽中的部分固定在内螺纹套筒外表面;所述钢支架固定在两块轨道滑块同侧的侧面上。
3.根据权利要求2所述的自动聚焦激光打标机器人,其特征在于:所述360度旋转装置包括伺服旋转减速电机、直角中空旋转平台和短支架;所述钢支架上沿垂直箱体的正面方向固定有伺服旋转减速电机;所述伺服旋转减速电机前端连接有直角中空旋转平台,伺服旋转减速电机驱动直角中空旋转平台旋转;所述直角中空旋转平台前端的侧面设置有一组短支架;所述光纤激光器固定在短支架上。
4.根据权利要求2所述的自动聚焦激光打标机器人,其特征在于:所述螺杆的上端与驱动电机连接;所述驱动电机固定在箱体的内部上壁上。
5.根据权利要求1所述的自动聚焦激光打标机器人,其特征在于:所述箱体内沿上下垂直方向上设置有连接架;所述竖向导轨固定在连接架上。
6.根据权利要求1所述的自动聚焦激光打标机器人,其特征在于:所述箱体的底部设置有两组万向轮。
技术总结
本技术涉及自动聚焦激光打标机器人,包括激光测距仪、光纤激光器、箱体、显示屏和工控机;箱体上设置有工控机,工控机上设置有显示屏;所述箱体内设置有竖向导轨;竖向导轨上设置有可进行上下移动的二轴位移装置;二轴位移装置上设置有360度旋转装置;光纤激光器固定在360度旋转装置上;光纤激光器前端设置有激光测距仪;工控机与激光测距仪、光纤激光器电性连接。本技术通过启动工控机配套的光纤激光器发射高能量密度的激光对管道进行照射打标,打标架上一个方位的管道打标完成后,可以启动360度旋转装置控制光纤激光器旋转到其他的合适打标位置和距离后,对打标架上其他方位的管道进行打标,提高了加工效率,降低了劳动强度。
技术研发人员:梅劲松,邓亚宏,明杰,王汉林,蔡春良,邓从蓉,文修林,张枫
受保护的技术使用者:中建三局第二建设安装有限公司
技术研发日:20231109
技术公布日:2024/6/2
- 还没有人留言评论。精彩留言会获得点赞!