电机胶盖和PCB板装配设备的制作方法
本技术涉及电机组装,尤其涉及电机胶盖和pcb板装配设备。
背景技术:
1、电机广泛应用于工业技术领域中,随着电机的广泛应用,人们对于电机组装设备也提出了越来越高的要求;电机在组装过程中,需要将pcb板组装入电机胶盖中,并进行焊接固定。
2、现有技术中,pcb板装入电机胶盖的步骤通常需要工人手动完成,由于每个工人的装配标准不一,进而造成pcb板与电机胶盖的装配质量存在差异,最终影响电机的质量。
3、因此,亟需电机胶盖和pcb板装配设备,以解决上述问题
技术实现思路
1、本实用新型的目的在于:提供电机胶盖和pcb板装配设备,以解决相关技术中通过工作人员对pcb板与电机胶盖进行装配,装配质量存在差异,最终影响电机的质量的问题。
2、本实用新型提供电机胶盖和pcb板装配设备,该电机胶盖和pcb板装配设备包括:
3、料箱,用于存放电机胶盖;
4、装配夹具,用于装夹所述电机胶盖;
5、搬运机构,所述搬运机构设置于所述料箱和所述装配夹具之间,所述搬运机构包括驱动件、转动臂、第一抓取组件和第二抓取组件,所述第一抓取组件和所述第二抓取组件分别设置于所述转动臂的周壁,所述驱动件驱动所述转动臂绕竖直方向的转轴转动,以使所述第一抓取组件能够将所述料箱内未安装有pcb板的所述电机胶盖装配至所述装配夹具,以使所述第二抓取组件能够将所述装配夹具内安装有所述pcb板的所述电机胶盖送至所述料箱,所述第一抓取组件与所述料箱相对时,所述第二抓取组件与所述装配夹具相对;
6、装配机构,所述装配机构用于将所述pcb板装入所述装配夹具上的所述电机胶盖内。
7、作为电机胶盖和pcb板装配设备的优选技术方案,所述第一抓取组件包括伸缩气缸和夹爪气缸,所述伸缩气缸的固定部固设于所述转动臂,所述伸缩气缸的伸缩部用于与所述夹爪气缸的固定部固接,所述夹爪气缸的夹爪部沿所述竖直方向与所述装配夹具或所述料箱相对。
8、作为电机胶盖和pcb板装配设备的优选技术方案,所述搬运机构还包括限位凸起、第一限位件和第二限位件,所述限位凸起设置于所述转动臂的周向侧壁,所述限位凸起与所述第一限位件绕所述转动臂的周向抵接时,所述第一抓取组件与所述料箱相对,所述限位凸起与所述第二限位件绕所述转动臂的周向抵接时,所述第一抓取组件与所述料箱相对。
9、作为电机胶盖和pcb板装配设备的优选技术方案,所述第一限位件包括第一底座和第一螺栓,所述第一螺栓与所述第一底座螺接,所述第一螺栓的轴线沿所述转动臂的转动切线设置,所述第一螺栓的螺头能够与所述限位凸起抵接;
10、所述第二限位件包括第二底座和第二螺栓,所述第二螺栓与所述第二底座螺接,所述第二螺栓的轴线沿所述转动臂的转动切线设置,所述第二螺栓的螺头能够与所述限位凸起抵接。
11、作为电机胶盖和pcb板装配设备的优选技术方案,还包括回收通道,所述回收通道的开口设置于所述抓取组件的转动路径上;
12、所述搬运机构还包括第三限位件,所述第三限位件具有与所述限位凸起绕所述转动臂的周向抵接的锁止状态,和远离所述转动臂的解锁状态,所述锁止状态为所述第一抓取组件与所述开口沿所述竖直方向相对。
13、作为电机胶盖和pcb板装配设备的优选技术方案,所述第三限位件包括第一伸缩件和抵接件,所述第一伸缩件驱动所述抵接件移动,以使所述第三限位件在锁止状态和解锁状态之间切换,所述锁止状态为所述限位凸起与所述抵接件沿所述转动臂的转动周向抵接。
14、作为电机胶盖和pcb板装配设备的优选技术方案,所述抵接件包括支撑板和螺接于所述支撑板上的第三螺栓,所述支撑板固设于所述第一伸缩件的伸缩部,所述第三螺栓沿所述转动臂的切向螺接于所述支撑板,所述第三限位件在锁止状态,所述第三螺栓的螺头用于与所述限位凸起抵接。
15、作为电机胶盖和pcb板装配设备的优选技术方案,所述第一抓取组件和所述第二抓取组件的夹角为180°。
16、作为电机胶盖和pcb板装配设备的优选技术方案,所述装配机构包括第二伸缩件,所述第二伸缩件用于驱动所述pcb板装入所述装配夹具上的所述电机胶盖。
17、作为电机胶盖和pcb板装配设备的优选技术方案,所述装配机构还包括执行板,所述执行板靠近所述装配夹具的一侧凹设有凹槽,所述pcb板部分插设于所述凹槽,所述执行板远离所述凹槽的一侧与所述第二伸缩件的伸缩端固接。
18、本实用新型的有益效果为:
19、本实用新型提供电机胶盖和pcb板装配设备,该电机胶盖和pcb板装配设备包括料箱、装配夹具、搬运机构和装配机构,料箱用于存放电机胶盖;装配夹具用于装夹电机胶盖;搬运机构设置于料箱和装配夹具之间,搬运机构包括驱动件、转动臂、第一抓取组件和第二抓取组件,第一抓取组件和第二抓取组件分别设置于转动臂的周壁,驱动件驱动转动臂绕竖直方向的转轴转动,以使第一抓取组件能够将料箱内未安装有pcb板的电机胶盖装配至装配夹具,以使第二抓取组件能够将装配夹具内安装有pcb板的电机胶盖送至料箱,第一抓取组件与料箱相对时,第二抓取组件与装配夹具相对,装配机构用于将pcb板装入装配夹具上的电机胶盖内。该装置工作时,第一抓取组件从料箱内抓取未装配的电机胶盖,与此同时,第二抓取组件从装配夹具上抓取装配好pcb板的电机胶盖,然后转动臂转动,进而使第一抓取组件将未装配的电机胶盖装配置装配夹具上,第二抓取组件将装配好pcb板的电机胶盖送回料箱内,此时转动臂反向转动,进而使第一抓取组件重新与料箱相对,第二抓取组件重新和装配夹具相对,因此完成了一个装配周期,以此装配周期进行循环,进而可以实现对电机胶盖和pcb板的装配。该装置实现了电机胶盖和pcb板机械化装配,进而提升了装配统一性,有利于提升电机整体的质量。
技术特征:
1.电机胶盖和pcb板装配设备,其特征在于,包括:
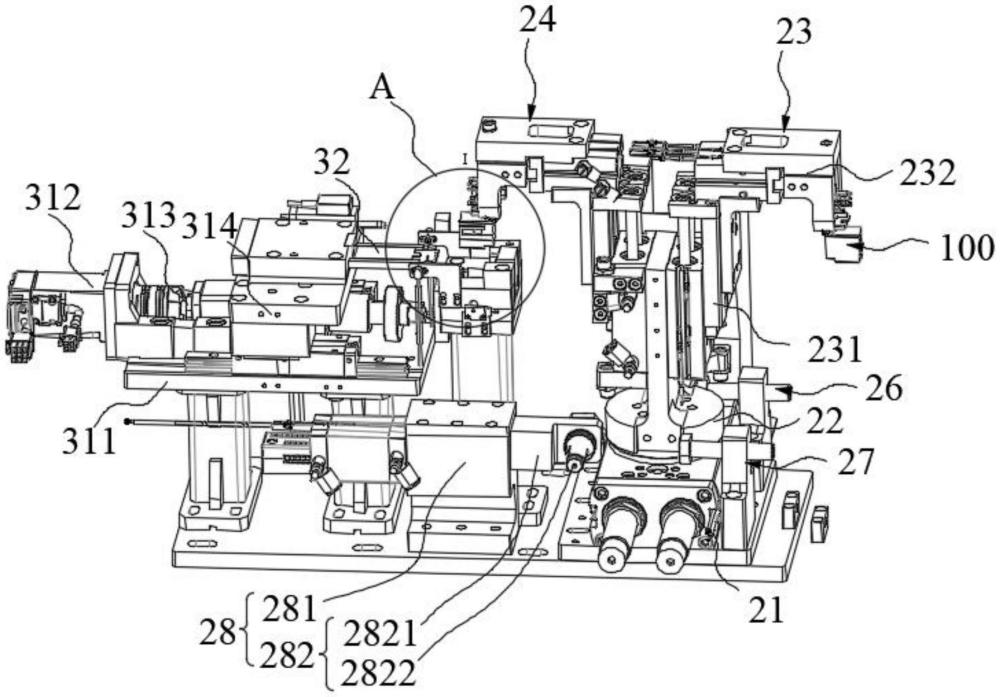
2.根据权利要求1所述的电机胶盖和pcb板装配设备,其特征在于,所述第一抓取组件(23)包括伸缩气缸(231)和夹爪气缸(232),所述伸缩气缸(231)的固定部固设于所述转动臂(22),所述伸缩气缸(231)的伸缩部用于与所述夹爪气缸(232)的固定部固接,所述夹爪气缸(232)的夹爪部沿所述竖直方向与所述装配夹具(1)或所述料箱相对。
3.根据权利要求1所述的电机胶盖和pcb板装配设备,其特征在于,所述搬运机构(2)还包括限位凸起(25)、第一限位件(26)和第二限位件(27),所述限位凸起(25)设置于所述转动臂(22)的周向侧壁,所述限位凸起(25)与所述第一限位件(26)绕所述转动臂(22)的周向抵接时,所述第一抓取组件(23)与所述料箱相对,所述限位凸起(25)与所述第二限位件(27)绕所述转动臂(22)的周向抵接时,所述第一抓取组件(23)与所述料箱相对。
4.根据权利要求3所述的电机胶盖和pcb板装配设备,其特征在于,所述第一限位件(26)包括第一底座(261)和第一螺栓(262),所述第一螺栓(262)与所述第一底座(261)螺接,所述第一螺栓(262)的轴线沿所述转动臂(22)的转动切线设置,所述第一螺栓(262)的螺头能够与所述限位凸起(25)抵接;
5.根据权利要求3所述的电机胶盖和pcb板装配设备,其特征在于,还包括回收通道(4),所述回收通道(4)的开口设置于所述抓取组件的转动路径上;
6.根据权利要求5所述的电机胶盖和pcb板装配设备,其特征在于,所述第三限位件(28)包括第一伸缩件(281)和抵接件(282),所述第一伸缩件(281)驱动所述抵接件(282)移动,以使所述第三限位件(28)在锁止状态和解锁状态之间切换,所述锁止状态为所述限位凸起(25)与所述抵接件(282)沿所述转动臂(22)的转动周向抵接。
7.根据权利要求6所述的电机胶盖和pcb板装配设备,其特征在于,所述抵接件(282)包括支撑板(2821)和螺接于所述支撑板(2821)上的第三螺栓(2822),所述支撑板(2821)固设于所述第一伸缩件(281)的伸缩部,所述第三螺栓(2822)沿所述转动臂(22)的切向螺接于所述支撑板(2821),所述第三限位件(28)在锁止状态,所述第三螺栓(2822)的螺头用于与所述限位凸起(25)抵接。
8.根据权利要求5所述的电机胶盖和pcb板装配设备,其特征在于,所述第一抓取组件(23)和所述第二抓取组件(24)的夹角为180°。
9.根据权利要求1所述的电机胶盖和pcb板装配设备,其特征在于,所述装配机构(3)包括第二伸缩件(31),所述第二伸缩件(31)用于驱动所述pcb板(200)装入所述装配夹具(1)上的所述电机胶盖(100)。
10.根据权利要求9所述的电机胶盖和pcb板装配设备,其特征在于,所述装配机构(3)还包括执行板,所述执行板靠近所述装配夹具(1)的一侧凹设有凹槽,所述pcb板(200)部分插设于所述凹槽,所述执行板远离所述凹槽的一侧与所述第二伸缩件(31)的伸缩端固接。
技术总结
本技术涉及电机组装技术领域,具体公开了电机胶盖和PCB板装配设备,该电机胶盖和PCB板装配设备包括料箱、装配夹具、搬运机构和装配机构,料箱存放电机胶盖;装配夹具装夹电机胶盖;搬运机构设置于料箱和装配夹具之间,搬运机构包括驱动件、转动臂、第一抓取组件和第二抓取组件,第一抓取组件和第二抓取组件分别设置于转动臂的周壁,驱动件驱动转动臂绕竖直方向的转轴转动,以使第一抓取组件能够将料箱内未安装有PCB板的电机胶盖装配至装配夹具,以使第二抓取组件能够将装配夹具内安装有PCB板的电机胶盖送至料箱,装配机构将PCB板装入装配夹具上的电机胶盖内。该装置实现了电机胶盖和PCB板机械化装配,提升了装配统一性,能够提升电机的质量。
技术研发人员:何宗航,岑勇
受保护的技术使用者:深圳市金岷江智能装备有限公司
技术研发日:20231123
技术公布日:2024/8/15
- 还没有人留言评论。精彩留言会获得点赞!