一种金属板材非人工式上下料设备的制作方法
本技术属于工业金属板材机加工,尤其涉及一种金属板材非人工式上下料设备。
背景技术:
1、现有板材机加工生产过程中,工人上料时需要将事先转递过来的板材利用桁车把代加工板材放置于龙门铣床加工平台上,代加工板材到位后人工开始进行夹具压装,全程人工手动定位;定位完成后启动龙门铣床对工件进行加工。加工完成后,人工拆除压装夹具;然后利用桁车把成品板材放置于固定地方,板材的上料、下料、都需人工在同一台龙门铣床上完成,以上工序以此循环操作。这种方式费时费力、效率低,而且存在板材砸伤人的风险,如何实现板材非人工式上下料,一直困扰行业内技术人员。
技术实现思路
1、本实用新型的目的在于提供一种金属板材非人工式上下料设备,以解决现有技术中存在的问题。
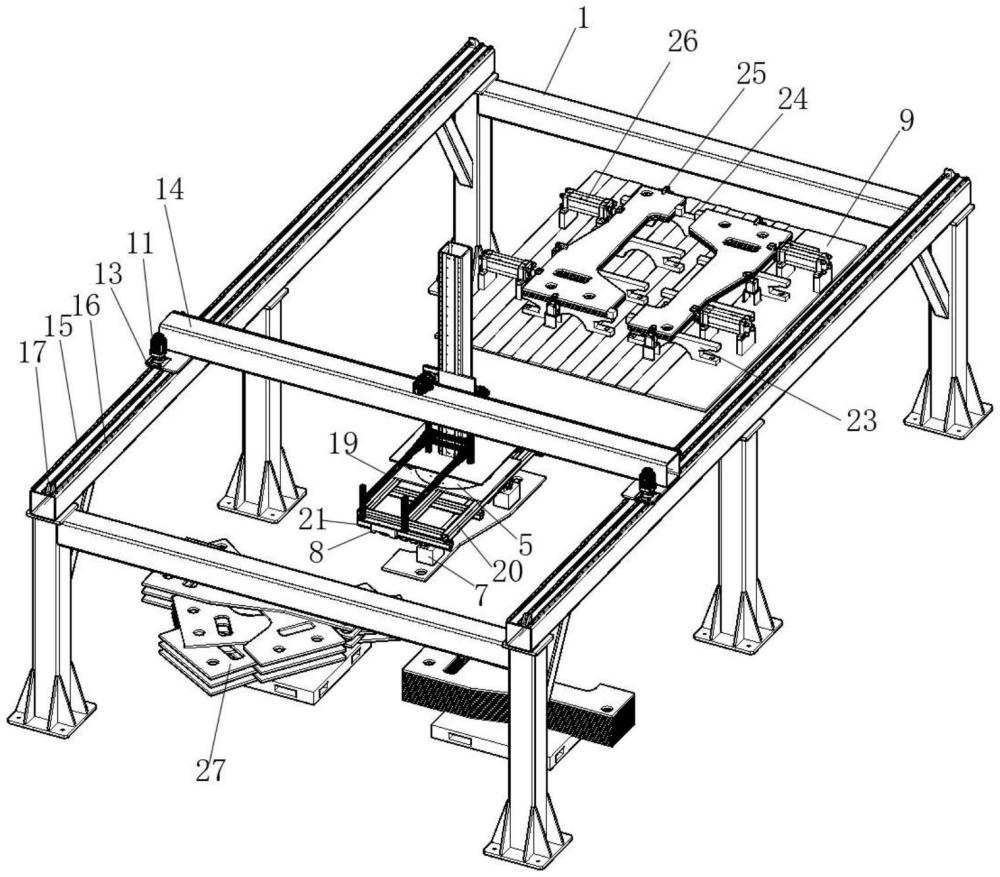
2、本实用新型解决其技术问题所采用的技术方案是:一种金属板材非人工式上下料设备,其特征在于,包括龙门桁架,所述龙门桁架上安装有y轴滑动装置,y轴滑动装置滑动连接有x轴滑动装置,x轴滑动装置滑动连接有z轴滑动装置,z轴滑动装置底端安装有旋转平台,旋转平台旋转端安装有手爪调节装置,手爪调节装置底部安装有电永磁手爪,旋转平台固定端安装有3d视觉装置,龙门桁架下方放置有龙门铣床加工平台,龙门铣床加工平台上安装有定位装置,x轴滑动装置、y轴滑动装置、z轴滑动装置、旋转平台、手爪调节装置、电永磁手爪、3d视觉装置、定位装置与控制器电性连接。
3、进一步的,y轴滑动装置由两个伺服电机、两个齿轮、两个运行板、两根机械臂、四根直线导轨、八个滑块、两根齿条、四个止挡组成,两根机械臂对称横向的固定在龙门桁架顶端,每根机械臂的两端均安装有止挡,每根机械臂上均安装有两根直线导轨和一根齿条,每根直线导轨上均滑动卡接两个滑块,同一机械臂上承载的滑块共同固定在一个运行板上,伺服电机固定在运行板上,伺服电机输出端安装有齿轮,齿轮啮合齿条,y轴滑动装置通过机械臂固定在龙门桁架上,y轴滑动装置通过伺服电机与控制器电性连接。
4、进一步的,x轴滑动装置由伺服电机、齿轮、运行板、机械臂、齿条、两根直线导轨、两个止挡组成,机械臂的两端固定在y轴滑动装置的两个运行板上,机械臂垂直面的两端均安装有止挡,机械臂垂直面上安装有两根直线导轨和一根齿条,每根直线导轨上均滑动卡接两个滑块,机械臂上承载的滑块共同固定在一个运行板上,伺服电机固定在运行板上,伺服电机输出端安装有齿轮,齿轮啮合齿条,x轴滑动装置的机械臂与y轴滑动装置的机械臂相互垂直,x轴滑动装置通过直线导轨、齿条、齿轮、滑块滑动连接y轴滑动装置,x轴滑动装置通过伺服电机与控制器电性连接。
5、进一步的,z轴滑动装置由伺服电机、齿轮、机械臂、齿条、直线导轨、两个止挡组成,机械臂垂直面的两端均安装有止挡,机械臂垂直面上安装有直线导轨和齿条,直线导轨上滑动卡接两个滑块,伺服电机、两个滑块固定在x轴滑动装置的运行板上,伺服电机输出端安装有齿轮,齿轮啮合齿条,z轴滑动装置的机械臂与x轴滑动装置的机械臂相互垂直,z轴滑动装置通过机械臂固定安装在旋转平台的固定端,z轴滑动装置通过伺服电机与控制器电性连接。
6、进一步的,旋转平台固定端安装有支撑架,3d视觉装置安装在支撑架另一端,旋转平台通过支撑架连接3d视觉装置,3d视觉装置的识别区域朝下。
7、进一步的,手爪调节装置包括框架、三根支撑杆,六根直线导轨、六个电动滑块,框架底部平行安装有三根直线导轨,每根直线导轨上滑动卡接有电动滑块,三个电动滑块共同固定连接有一根支撑杆,另外两根支撑杆焊接在框架两端,每根支撑杆底部均安装有直线导轨,直线导轨上均滑动卡接有电动滑块,每根支撑杆承载的电动滑块底部均固定安装有电永磁手爪,手爪调节装置通过电动滑块与控制器电性连接。
8、进一步的,定位装置包括若干个工件放置座、定位块、转角油缸、定位油缸,定位油缸安装在龙门铣床加工平台相对的两端,转角油缸安装在龙门铣床加工平台另外相对的两端,定位块固定在工件放置座上,工件放置座的上顶面均处于同一水平面上。
9、进一步的,龙门桁架下方划分为放料区、加工区、码垛区,加工区位于龙门桁架一端下方的区域,加工区、码垛区并排位于龙门桁架另一端下方的区域,龙门铣床加工平台位于加工区。
10、本实用新型具有以下有益效果:
11、1.生产时只需要工人将代加工金属板材放置于龙门桁架下方即可,然后由电永磁手爪完成取料、放料等一系列动作,且相对于人工放料要更加均匀、整齐,解决了人工放料的弊端,可实现一人多机的生产方式,提高了加工效率,节省了人工,降低砸伤风险。
12、2.电永磁手爪吸取板材,电永磁手爪负重比较均匀,有毛刺与铁屑也不会影响抓取,相对于吸盘要更稳定,发挥的空间更大,即使断电吸取上来的板材也不会掉落。
13、3.定位装置减少了重复拆装夹具的工序,也就意味着可以减少大部分的重复劳动时间,提高生产效率,减少生产成本。
14、4.旋转平台能够旋转电永磁手爪,配合3d视觉装置在扫描完成后调整电永磁手爪抓取板材时的角度,使三个电永磁手爪均吸取在板材上,从而方便快速旋转抓取板材。
15、5.3d视觉装置可以快速从杂乱无章的板材中提取图像并反馈给控制器,从而使控制器根据分亏的图像进行运算,从而更精准的吸取板材。
技术特征:
1.一种金属板材非人工式上下料设备,其特征在于,包括龙门桁架,所述龙门桁架上安装有y轴滑动装置,y轴滑动装置滑动连接有x轴滑动装置,x轴滑动装置滑动连接有z轴滑动装置,z轴滑动装置底端安装有旋转平台,旋转平台旋转端安装有手爪调节装置,手爪调节装置底部安装有电永磁手爪,旋转平台固定端安装有3d视觉装置,龙门桁架下方放置有龙门铣床加工平台,龙门铣床加工平台上安装有定位装置,x轴滑动装置、y轴滑动装置、z轴滑动装置、旋转平台、手爪调节装置、电永磁手爪、3d视觉装置、定位装置与控制器电性连接。
2.根据权利要求1所述的金属板材非人工式上下料设备,其特征在于,所述y轴滑动装置由两个伺服电机、两个齿轮、两个运行板、两根机械臂、四根直线导轨、八个滑块、两根齿条、四个止挡组成,两根机械臂对称横向的固定在龙门桁架顶端,每根机械臂的两端均安装有止挡,每根机械臂上均安装有两根直线导轨和一根齿条,每根直线导轨上均滑动卡接两个滑块,同一机械臂上承载的滑块共同固定在一个运行板上,伺服电机固定在运行板上,伺服电机输出端安装有齿轮,齿轮啮合齿条,y轴滑动装置通过机械臂固定在龙门桁架上,y轴滑动装置通过伺服电机与控制器电性连接。
3.根据权利要求2所述的金属板材非人工式上下料设备,其特征在于,所述x轴滑动装置由伺服电机、齿轮、运行板、机械臂、齿条、两根直线导轨、两个止挡组成,机械臂的两端固定在y轴滑动装置的两个运行板上,机械臂垂直面的两端均安装有止挡,机械臂垂直面上安装有两根直线导轨和一根齿条,每根直线导轨上均滑动卡接两个滑块,机械臂上承载的滑块共同固定在一个运行板上,伺服电机固定在运行板上,伺服电机输出端安装有齿轮,齿轮啮合齿条,x轴滑动装置的机械臂与y轴滑动装置的机械臂相互垂直,x轴滑动装置通过直线导轨、齿条、齿轮、滑块滑动连接y轴滑动装置,x轴滑动装置通过伺服电机与控制器电性连接。
4.根据权利要求3所述的金属板材非人工式上下料设备,其特征在于,所述z轴滑动装置由伺服电机、齿轮、机械臂、齿条、直线导轨、两个止挡组成,机械臂垂直面的两端均安装有止挡,机械臂垂直面上安装有直线导轨和齿条,直线导轨上滑动卡接两个滑块,伺服电机、两个滑块固定在x轴滑动装置的运行板上,伺服电机输出端安装有齿轮,齿轮啮合齿条,z轴滑动装置的机械臂与x轴滑动装置的机械臂相互垂直,z轴滑动装置通过机械臂固定安装在旋转平台的固定端,z轴滑动装置通过伺服电机与控制器电性连接。
5.根据权利要求1所述的金属板材非人工式上下料设备,其特征在于,所述旋转平台固定端安装有支撑架,3d视觉装置安装在支撑架另一端,旋转平台通过支撑架连接3d视觉装置,3d视觉装置的识别区域朝下。
6.根据权利要求1所述的金属板材非人工式上下料设备,其特征在于,所述手爪调节装置包括框架、三根支撑杆,六根直线导轨、六个电动滑块,框架底部平行安装有三根直线导轨,每根直线导轨上滑动卡接有电动滑块,三个电动滑块共同固定连接有一根支撑杆,另外两根支撑杆焊接在框架两端,每根支撑杆底部均安装有直线导轨,直线导轨上均滑动卡接有电动滑块,每根支撑杆承载的电动滑块底部均固定安装有电永磁手爪,手爪调节装置通过电动滑块与控制器电性连接。
7.根据权利要求1所述的金属板材非人工式上下料设备,其特征在于,所述定位装置包括若干个工件放置座、定位块、转角油缸、定位油缸,定位油缸安装在龙门铣床加工平台相对的两端,转角油缸安装在龙门铣床加工平台另外相对的两端,定位块固定在工件放置座上,工件放置座的上顶面均处于同一水平面上。
8.根据权利要求1所述的金属板材非人工式上下料设备,其特征在于,所述龙门桁架下方划分为放料区、加工区、码垛区,加工区位于龙门桁架一端下方的区域,加工区、码垛区并排位于龙门桁架另一端下方的区域,龙门铣床加工平台位于加工区。
技术总结
本技术属于工业金属板材机加工技术领域,尤其涉及一种金属板材非人工式上下料设备。包括龙门桁架,所述龙门桁架上安装有Y轴滑动装置,Y轴滑动装置滑动连接有X轴滑动装置,X轴滑动装置滑动连接有Z轴滑动装置,Z轴滑动装置底端安装有旋转平台,旋转平台旋转端安装有手爪调节装置,手爪调节装置底部安装有电永磁手爪,旋转平台固定端安装有3D视觉装置,龙门桁架下方放置有龙门铣床加工平台,龙门铣床加工平台上安装有定位装置。本技术能实现非人工上下料,相对于人工放料要更加均匀、整齐,解决了人工放料的弊端,可实现一人多机的生产方式,提高了加工效率,节省了人工,降低砸伤风险。
技术研发人员:张坤之,赵兴浩,张乃峰,张龙,姚立豪,曹先社,耿向辉
受保护的技术使用者:聊城鑫泰机床有限公司
技术研发日:20231201
技术公布日:2024/7/9
- 还没有人留言评论。精彩留言会获得点赞!