一种防止掉落的三轴桁架机床上下料机器人的制作方法
本技术涉及机床上下料机器人的,特别是涉及一种防止掉落的三轴桁架机床上下料机器人。
背景技术:
1、机床上下料机器人的主要功能是将工件从储料区取出并放置到机床上进行加工,然后将加工完成的工件从机床上取出并放置到成品区。它能够根据预设的程序和指令,自动完成上下料的动作,提高生产效率和产品质量。
2、如现有技术授权公告号为cn210100006u的专利中,该实用新型涉及三轴桁架机床上下料机器人技术领域,尤其为一种防止货物掉落的三轴桁架机床上下料机器人,包括上下料机器人和用于支撑上下料机器人的三轴桁架机床及其内部的控制单元和驱动单元,所述上下料机器人的右侧焊接有支撑板,所述支撑板的底部栓接有用于竖直移动的第一液压杆,所述第一液压杆的底部栓接有第一连接板,所述第一连接板的底部栓接有用于水平移动的第二液压杆。
3、但该机器人使用中发现,通过固定限位装置对货物的防掉落可靠性较差,机器人移动过程中容易出现货物掉落的情况,降低了上下料使用的安全性。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种有效避免工件上下料移动过程中掉落的情况,提高防掉落可靠性的防止掉落的三轴桁架机床上下料机器人。
2、本实用新型的一种防止掉落的三轴桁架机床上下料机器人,包括箱体和两组转轴,箱体端部设置有开口,两组转轴分别安装在箱体左右两端;还包括支撑装置、吸气设备、支架、多组第一电缸、两组吸气箱和多组吸盘,两组转轴分别旋转安装在支架内侧壁上,支架安装在支撑装置上,支撑装置用于带动支架移动调节,并且支撑装置用于带动转轴旋转,多组第一电缸的固定端分别安装在箱体左右两端,两组吸气箱分别安装在多组第一电缸移动端上,两组吸气箱与吸气设备连通,多组吸盘对向连通设置在两组吸气箱外侧壁上;初始状态下箱体的开口朝向底部,当需要对机床上下料时,通过支撑装置带动支架移动调节,使支架带动箱体移动至需要搬运的工件上方,之后将支架向下移动,使支架带动箱体向下移动,使箱体套在需要上搬运的工件外部,之后通过多组第一电缸推动两组吸气箱相互靠近移动,使两组吸气箱带动多组吸盘与工件外侧壁接触,通过吸气设备对两组吸气箱内吸气,使多组吸盘将工件吸附固定,之后支撑装置带动支架提升高度,并且支撑装置带动转轴旋转,转轴旋转后带动箱体旋转,从而使箱体的开口旋转移动至顶部,从而使工件在箱体内部搬运移动,有效避免工件上下料移动过程中掉落的情况,提高防掉落可靠性。
3、优选的,所述支撑装置包括平移装置、电动旋转台、支撑臂、连接件、第二电缸、第一电机、第二电机和第三电机,电动旋转台安装在平移装置上,平移装置用于带动电动旋转台水平动,支撑臂顶端旋转安装在电动旋转台的旋转端上,连接件旋转安装在支撑臂底端,第二电缸的固定端安装在连接件底端,第二电缸的移动端与支架连接,第三电机安装在支撑臂外侧壁上,并且第三电机用于带动支撑臂摆动,第二电机安装在支撑臂外侧壁下部,第二电机输出端与连接件连接,第一电机安装在支架外侧壁上,第一电机输出端与右部转轴连接;通过控制第二电缸移动端伸缩长度,使第二电缸带动支架升降移动,从而使箱体升降高度对工件拾取,通过第一电机带动右部转轴旋转,使右部转轴带动箱体旋转,从而使箱体将工件防护移动,避免工件运输途中掉落,通过控制电动旋转台、第二电机和第三电机配合旋转,从而提高支撑臂和第二电缸旋转摆动调节的便利性,提高机器人对机床上下料使用的灵活性。
4、优选的,所述平移装置包括驱动装置、滑块、立柱、横梁和支脚,滑块通过驱动装置水平滑动安装在横梁上,滑块底端与电动旋转台顶端连接,横梁安装在立柱顶端,支脚安装在立柱底端;通过驱动装置带动滑块水平滑动,使滑块带动电动旋转台水平移动,提高箱体对工件动搬运的便利性。
5、优选的,所述驱动装置包括丝杠和第四电机,丝杠旋转安装在横梁内侧壁上,滑块配合螺装在丝杠上,第四电机安装在横梁外侧壁上,第四电机输出端与丝杠连接;通过第四电机带动丝杠旋转,使丝杠驱动滑块水平滑动调节,从而提高机器人对工件上下料的便利性。
6、优选的,所述吸气设备包括真空泵,真空泵安装在滑块顶端,并且真空泵输入端通过软管与两组吸气箱连通;通过真空泵对两组吸气箱内吸气从而使多组吸盘将工件吸附拾取,提高机器人对工件拾取搬运的便利性。
7、优选的,还包括多组伸缩杆,多组伸缩杆的顶端均与连接件底端连接,多组伸缩杆的底端均与支架顶端连接;通过设置多组伸缩杆,提高支架升降的导向稳定性,提高机器人对工件输送的破平稳性。
8、优选的,所述立柱和支脚之间设置有加强筋;提高立柱与支脚之间的连接牢固性,提高支脚对立柱支撑的稳定性。
9、与现有技术相比本实用新型的有益效果为:初始状态下箱体的开口朝向底部,当需要对机床上下料时,通过支撑装置带动支架移动调节,使支架带动箱体移动至需要搬运的工件上方,之后将支架向下移动,使支架带动箱体向下移动,使箱体套在需要上搬运的工件外部,之后通过多组第一电缸推动两组吸气箱相互靠近移动,使两组吸气箱带动多组吸盘与工件外侧壁接触,通过吸气设备对两组吸气箱内吸气,使多组吸盘将工件吸附固定,之后支撑装置带动支架提升高度,并且支撑装置带动转轴旋转,转轴旋转后带动箱体旋转,从而使箱体的开口旋转移动至顶部,从而使工件在箱体内部搬运移动,有效避免工件上下料移动过程中掉落的情况,提高防掉落可靠性。
技术特征:
1.一种防止掉落的三轴桁架机床上下料机器人,包括箱体(1)和两组转轴(3),箱体(1)端部设置有开口,两组转轴(3)分别安装在箱体(1)左右两端;其特征在于,还包括支撑装置、吸气设备、支架(2)、多组第一电缸(4)、两组吸气箱(5)和多组吸盘(6),两组转轴(3)分别旋转安装在支架(2)内侧壁上,支架(2)安装在支撑装置上,支撑装置用于带动支架(2)移动调节,并且支撑装置用于带动转轴(3)旋转,多组第一电缸(4)的固定端分别安装在箱体(1)左右两端,两组吸气箱(5)分别安装在多组第一电缸(4)移动端上,两组吸气箱(5)与吸气设备连通,多组吸盘(6)对向连通设置在两组吸气箱(5)外侧壁上。
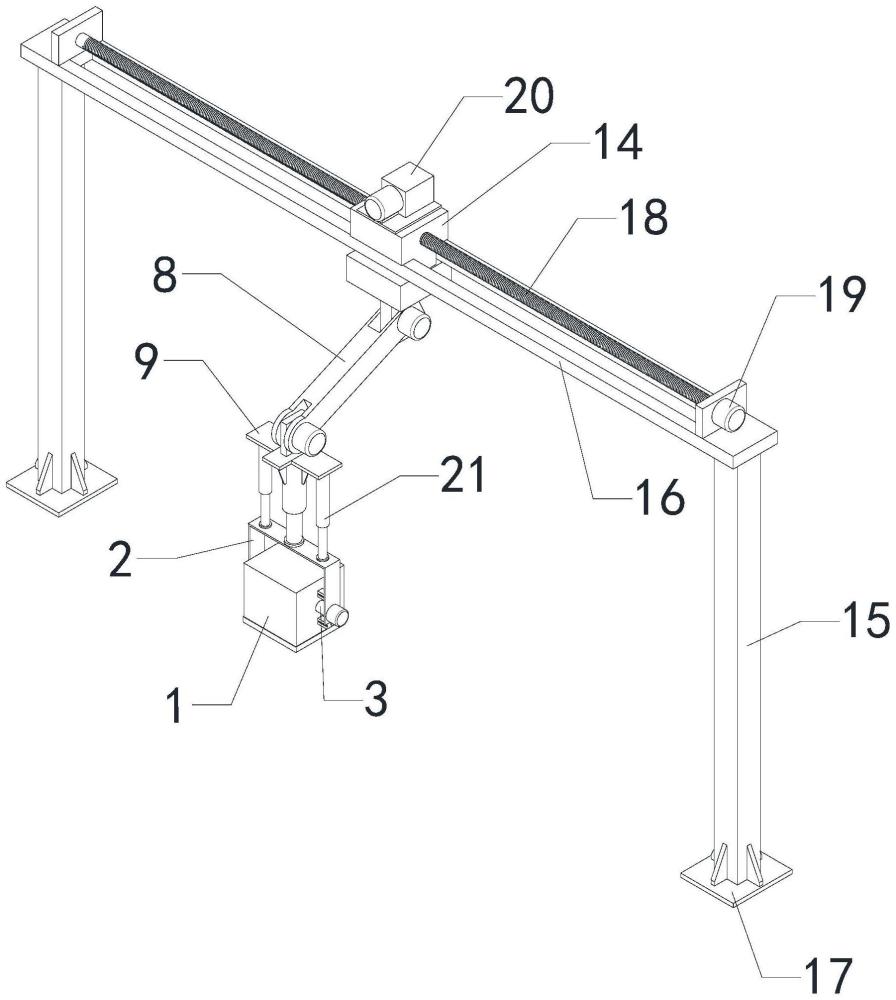
2.如权利要求1所述的一种防止掉落的三轴桁架机床上下料机器人,其特征在于,所述支撑装置包括平移装置、电动旋转台(7)、支撑臂(8)、连接件(9)、第二电缸(10)、第一电机(11)、第二电机(12)和第三电机(13),电动旋转台(7)安装在平移装置上,平移装置用于带动电动旋转台(7)水平动,支撑臂(8)顶端旋转安装在电动旋转台(7)的旋转端上,连接件(9)旋转安装在支撑臂(8)底端,第二电缸(10)的固定端安装在连接件(9)底端,第二电缸(10)的移动端与支架(2)连接,第三电机(13)安装在支撑臂(8)外侧壁上,并且第三电机(13)用于带动支撑臂(8)摆动,第二电机(12)安装在支撑臂(8)外侧壁下部,第二电机(12)输出端与连接件(9)连接,第一电机(11)安装在支架(2)外侧壁上,第一电机(11)输出端与右部转轴(3)连接。
3.如权利要求2所述的一种防止掉落的三轴桁架机床上下料机器人,其特征在于,所述平移装置包括驱动装置、滑块(14)、立柱(15)、横梁(16)和支脚(17),滑块(14)通过驱动装置水平滑动安装在横梁(16)上,滑块(14)底端与电动旋转台(7)顶端连接,横梁(16)安装在立柱(15)顶端,支脚(17)安装在立柱(15)底端。
4.如权利要求3所述的一种防止掉落的三轴桁架机床上下料机器人,其特征在于,所述驱动装置包括丝杠(18)和第四电机(19),丝杠(18)旋转安装在横梁(16)内侧壁上,滑块(14)配合螺装在丝杠(18)上,第四电机(19)安装在横梁(16)外侧壁上,第四电机(19)输出端与丝杠(18)连接。
5.如权利要求1所述的一种防止掉落的三轴桁架机床上下料机器人,其特征在于,所述吸气设备包括真空泵(20),真空泵(20)安装在滑块(14)顶端,并且真空泵(20)输入端通过软管与两组吸气箱(5)连通。
6.如权利要求1所述的一种防止掉落的三轴桁架机床上下料机器人,其特征在于,还包括多组伸缩杆(21),多组伸缩杆(21)的顶端均与连接件(9)底端连接,多组伸缩杆(21)的底端均与支架(2)顶端连接。
7.如权利要求3所述的一种防止掉落的三轴桁架机床上下料机器人,其特征在于,所述立柱(15)和支脚(17)之间设置有加强筋。
技术总结
本技术涉及机床上下料机器人的技术领域,特别是涉及一种防止掉落的三轴桁架机床上下料机器人,其有效避免工件上下料移动过程中掉落的情况,提高防掉落可靠性;包括箱体和两组转轴,箱体端部设置有开口,两组转轴分别安装在箱体左右两端;还包括支撑装置、吸气设备、支架、多组第一电缸、两组吸气箱和多组吸盘,两组转轴分别旋转安装在支架内侧壁上,支架安装在支撑装置上,支撑装置用于带动支架移动调节,并且支撑装置用于带动转轴旋转,多组第一电缸的固定端分别安装在箱体左右两端,两组吸气箱分别安装在多组第一电缸移动端上,两组吸气箱与吸气设备连通,多组吸盘对向连通设置在两组吸气箱外侧壁上。
技术研发人员:范克青,丁光辉,张磊
受保护的技术使用者:山东迈德尔机器人科技有限公司
技术研发日:20231229
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!