一种焊接机器人的角度调节机构的制作方法
本技术涉及焊接机器人,尤其涉及一种焊接机器人的角度调节机构。
背景技术:
1、如中国专利网上公开的一种焊接机器人的角度调节机构(申请号:202221766624.0)中虽然能够对焊接机器人的高度以及水平方向上左右前后的位置进行调节,但是不能调节焊接机器人的倾角,焊接机器人始终保持竖直状态,只能对水平状态的物品进行焊接,这样一来,很多倾斜的物品不方便进行焊接。
技术实现思路
1、基于现有的焊接机器人倾角不便调节的技术问题,本实用新型提出了一种焊接机器人的角度调节机构。
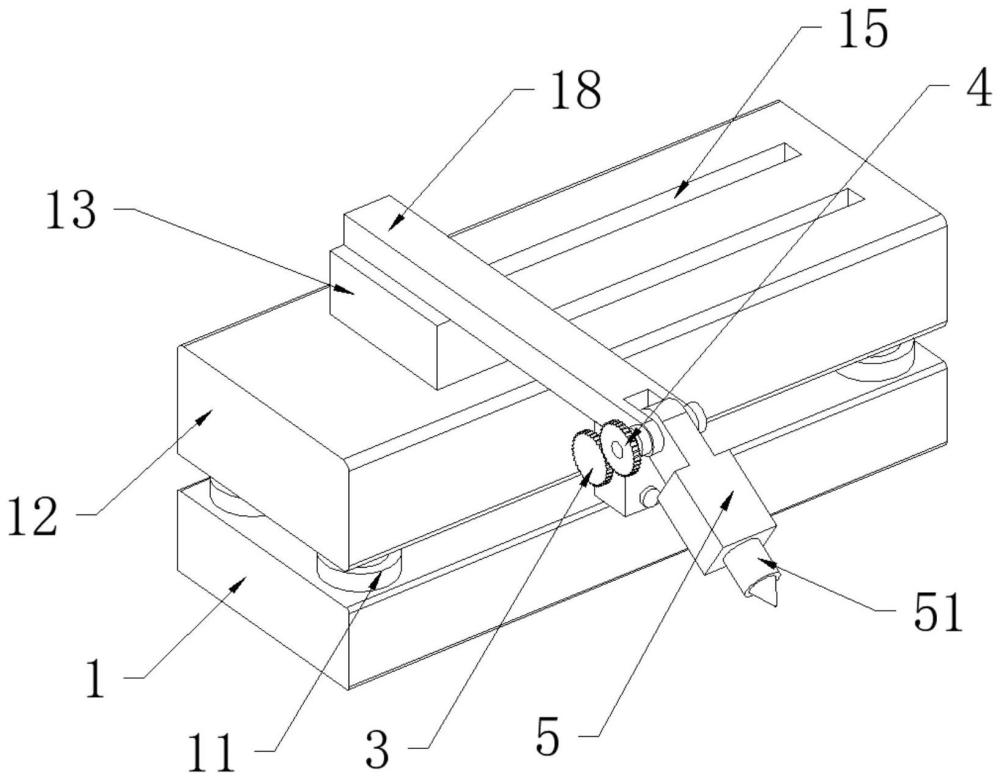
2、本实用新型提出的一种焊接机器人的角度调节机构,包括底座,所述底座的前上方设置有调节装置,所述调节装置包括调节电机、第一齿轮、第二齿轮和摆动杆,所述调节电机启动时转轴带动第一齿轮转动,所述第一齿轮转动带动第二齿轮转动,所述第二齿轮转动时会让摆动杆进行摆动。
3、优选地,所述底座的上表面位于四个拐角处均固定安装有电动伸缩杆,四个所述电动伸缩杆以底座的轴线为阵列中心呈矩形阵列分布,所述电动伸缩杆的上方设置有升降座,所述升降座的下表面与四个所述电动伸缩杆的上端均固定连接;
4、通过上述技术方案,电动伸缩杆启动能够控制升降座进行上下移动,进而调节焊接机器人的高度。
5、优选地,所述升降座的上表面滑动连接有滑动板,所述滑动板的下表面固定安装有滑动框,所述升降座的内部开设有滑槽,所述滑动框的外表面与滑槽的内部滑动连接;
6、通过上述技术方案,滑动框卡在滑槽内进行滑动,保证滑动板能够始终紧贴着升降座的上表面进行滑动。
7、优选地,所述升降座的内部固定安装有控制电机,所述控制电机的转轴上固定安装有螺纹杆,所述螺纹杆的外表面与滑动框的内部螺纹连接,所述滑动板的上表面固定安装有安装横杆;
8、通过上述技术方案,控制电机启动时转轴带动螺纹杆转动,使滑动框沿着螺纹杆外部进行水平移动,滑动框带动滑动板移动。
9、优选地,所述安装横杆的前端转动连接有转动杆,所述摆动杆固定安装在转动杆的外表面,所述摆动杆的前端内部固定安装有焊接机器人;
10、通过上述技术方案,转动杆卡在安装横杆前端转动,让摆动杆带动焊接机器人移动,进而调节焊接机器人的倾角。
11、优选地,所述安装横杆的下表面固定安装有安装柱,所述调节电机固定安装在安装柱的内部,所述第一齿轮固定安装在调节电机的转轴上,所述第二齿轮固定安装在转动杆的外端表面,所述第二齿轮的外表面与第一齿轮的外表面啮合;
12、通过上述技术方案,调节电机启动时转轴带动第一齿轮转动,第一齿轮带动第二齿轮转动,使转动杆进行转动。
13、本实用新型中的有益效果为:
14、通过设置调节装置,在对焊接机器人的位置进行调节时,启动电动伸缩杆,控制升降座进行上下移动,调节焊接机器人的高度,启动控制电机,转轴带动螺纹杆转动,使滑动框带动滑动板移动,滑动板带动安装横杆移动,调节焊接机器人的水平方向位置,启动调节电机,让转轴带动第一齿轮转动,第一齿轮带动第二齿轮转动,使转动杆进行转动,让摆动杆带动焊接机器人移动,进而调节焊接机器人的倾角,使焊接机器人方便对不同角度的物品进行焊接,达到了方便对焊接机器人倾角进行调节的效果。
技术特征:
1.一种焊接机器人的角度调节机构,包括底座(1),其特征在于:所述底座(1)的前上方设置有调节装置,所述调节装置包括调节电机(2)、第一齿轮(3)、第二齿轮(4)和摆动杆(5),所述调节电机(2)启动时转轴带动第一齿轮(3)转动,所述第一齿轮(3)转动带动第二齿轮(4)转动,所述第二齿轮(4)转动时会让摆动杆(5)进行摆动。
2.根据权利要求1所述的一种焊接机器人的角度调节机构,其特征在于:所述底座(1)的上表面位于四个拐角处均固定安装有电动伸缩杆(11),四个所述电动伸缩杆(11)以底座(1)的轴线为阵列中心呈矩形阵列分布,所述电动伸缩杆(11)的上方设置有升降座(12),所述升降座(12)的下表面与四个所述电动伸缩杆(11)的上端均固定连接。
3.根据权利要求2所述的一种焊接机器人的角度调节机构,其特征在于:所述升降座(12)的上表面滑动连接有滑动板(13),所述滑动板(13)的下表面固定安装有滑动框(14),所述升降座(12)的内部开设有滑槽(15),所述滑动框(14)的外表面与滑槽(15)的内部滑动连接。
4.根据权利要求3所述的一种焊接机器人的角度调节机构,其特征在于:所述升降座(12)的内部固定安装有控制电机(16),所述控制电机(16)的转轴上固定安装有螺纹杆(17),所述螺纹杆(17)的外表面与滑动框(14)的内部螺纹连接,所述滑动板(13)的上表面固定安装有安装横杆(18)。
5.根据权利要求4所述的一种焊接机器人的角度调节机构,其特征在于:所述安装横杆(18)的前端转动连接有转动杆(19),所述摆动杆(5)固定安装在转动杆(19)的外表面,所述摆动杆(5)的前端内部固定安装有焊接机器人(51)。
6.根据权利要求5所述的一种焊接机器人的角度调节机构,其特征在于:所述安装横杆(18)的下表面固定安装有安装柱(110),所述调节电机(2)固定安装在安装柱(110)的内部,所述第一齿轮(3)固定安装在调节电机(2)的转轴上,所述第二齿轮(4)固定安装在转动杆(19)的外端表面,所述第二齿轮(4)的外表面与第一齿轮(3)的外表面啮合。
技术总结
本技术属于焊接机器人技术领域,尤其是一种焊接机器人的角度调节机构,包括底座,所述底座的前上方设置有调节装置,所述调节装置包括调节电机、第一齿轮、第二齿轮和摆动杆,所述调节电机启动时转轴带动第一齿轮转动。该焊接机器人的角度调节机构,在对焊接机器人的位置进行调节时,启动电动伸缩杆,控制升降座进行上下移动,调节焊接机器人的高度,启动控制电机,转轴带动螺纹杆转动,使滑动框带动滑动板移动,滑动板带动安装横杆移动,调节焊接机器人的水平方向位置,启动调节电机,让转轴带动第一齿轮转动,第一齿轮带动第二齿轮转动,使转动杆进行转动,让摆动杆带动焊接机器人移动,进而调节焊接机器人的倾角。
技术研发人员:余鹏程,余必玖
受保护的技术使用者:安徽省浙达智能科技有限公司
技术研发日:20231229
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!