全自动直线焊缝机的制作方法
本发明涉及壶身焊接领域,尤其涉及全自动直线焊缝机。
背景技术:
1、目前的壶身焊接,主要采用直线焊缝机,但是直线焊缝机仅具有单一焊接功能,自动化程度低,其他步骤由人工操作,如上料和下料等,导致生产效率低下。
技术实现思路
1、为解决上述问题,本技术方案提供全自动直线焊缝机。
2、为实现上述目的,本技术方案如下:
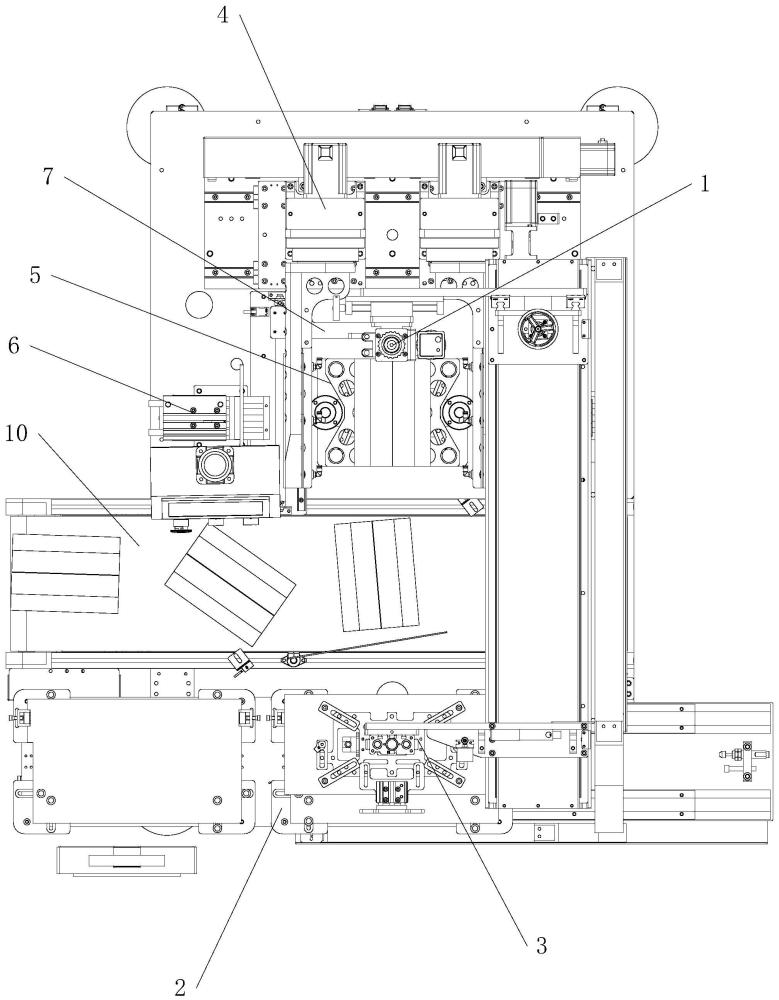
3、全自动直线焊缝机,包括
4、激光焊接机构,其用于将位于焊接位置上的板料焊接为壶身;
5、双工位进料机构,其用于供板料进料;
6、夹爪机构,其用于从所述双工位进料机构上抓取板料;
7、定位旋转夹紧机构,其处于夹持状态时,对进入夹持位置的板料进行夹持;其处于焊接状态时,将板料卷曲使板料两端相接并位于焊接位置上;
8、板料顶托机构,其用于支撑板料;
9、定位机构,其用于将所述板料顶托机构上的板料定位于夹持位置上;
10、成品出料机构,其用于将夹持位置上的壶身推出至出料皮带上;
11、所述夹爪机构从所述双工位进料机构上抓取板料后放置在所述板料顶托机构上,所述定位机构将该板料定位于夹持位置后,所述定位旋转夹紧机构对该板料进行夹持并弯曲,所述激光焊接机构对该板料进行直线焊接以形成壶身,所述成品出料机构将该壶身推出。
12、如上所述的全自动直线焊缝机,所述双工位进料机构包括横向移动装置,以及两个并排设于所述横向移动装置上的料仓,所述料仓包括底板,以及设于所述底板上的定位柱,所述定位柱用于限制料板的位置。
13、如上所述的全自动直线焊缝机,还包括支架,以及设于所述支架上的前后移动模组,所述激光焊接机构设于所述前后移动模组的一端,所述夹爪机构设于所述前后移动模组的另一端,并由所述前后移动模组驱动往靠近或远离所述激光焊接机构的方向移动。
14、如上所述的全自动直线焊缝机,所述板料顶托机构包括顶托支架,设于所述顶托支架上的顶托气缸,设于所述顶托气缸输出端上的顶托面板,以及设于所述顶托支架上的引导柱,所述引导柱与所述顶托面板滑动配合。
15、如上所述的全自动直线焊缝机,两所述定位机构分别设于所述定位旋转夹紧机构的两侧,所述定位机构包括定位座,设于所述定位座上的调节座,设于所述调节座上的调节气缸,以及设于所述调节气缸上的定位部板。
16、如上所述的全自动直线焊缝机,所述成品出料机构包括出料气缸,设于所述出料气缸输出端上的推料板,以及与所述推料板滑动配合的导轨,所述推料板设置方向与所述出料气缸移动方向垂直。
17、如上所述的全自动直线焊缝机,所述定位旋转夹紧机构包括两旋转电机,以及设于所述旋转电机输出端上的夹紧组件,两所述夹紧组件分别夹持板件两端,所述旋转电机带动所述夹紧组件转动,以使板件两端相接。
18、如上所述的全自动直线焊缝机,所述夹紧组件包括相对所述旋转电机偏心设置的夹紧臂,设于所述夹紧臂上的夹紧气缸,以及由所述夹紧气缸驱动的夹紧件。
19、如上所述的全自动直线焊缝机,所述定位旋转夹紧机构还包括横移机构,所述旋转电机设于所述横移机构上,所述横移机构带动所述夹紧组件相互靠近,以使板件两端相接。
20、如上所述的全自动直线焊缝机,所述前后移动模组同步驱动所述激光焊接机构和所述夹爪机构。
21、本申请有益效果为:
22、本发明提供了全自动直线焊缝机,将板料放置在双工位进料机构上,夹爪机构从双工位进料机构上抓取板料后放置在板料顶托机构上,定位机构将该板料定位于夹持位置后,定位旋转夹紧机构对该板料进行夹持并弯曲,激光焊接机构对该板料进行直线焊接以形成壶身,成品出料机构该壶身推出。整个过程全动化处理,减少人工操作,提高生产效率。
技术特征:
1.全自动直线焊缝机,其特征在于:包括
2.根据权利要求1所述的全自动直线焊缝机,其特征在于:所述双工位进料机构(2)包括横向移动装置(21),以及两个并排设于所述横向移动装置(21)上的料仓(22),所述料仓(22)包括底板(221),以及设于所述底板(221)上的定位柱(222),所述定位柱(222)用于限制料板的位置。
3.根据权利要求1所述的全自动直线焊缝机,其特征在于:还包括支架(8),以及设于所述支架(8)上的前后移动模组(9),所述激光焊接机构(1)设于所述前后移动模组(9)的一端,所述夹爪机构(3)设于所述前后移动模组(9)的另一端,并由所述前后移动模组(9)驱动往靠近或远离所述激光焊接机构(1)的方向移动。
4.根据权利要求1所述的全自动直线焊缝机,其特征在于:所述板料顶托机构(5)包括顶托支架(51),设于所述顶托支架(51)上的顶托气缸(52),设于所述顶托气缸(52)输出端上的顶托面板(53),以及设于所述顶托支架(51)上的引导柱(54),所述引导柱(54)与所述顶托面板(53)滑动配合。
5.根据权利要求1所述的全自动直线焊缝机,其特征在于:两所述定位机构(6)分别设于所述定位旋转夹紧机构(4)的两侧,所述定位机构(6)包括定位座(61),设于所述定位座(61)上的调节座(62),设于所述调节座(62)上的调节气缸(63),以及设于所述调节气缸(63)上的定位部板(64)。
6.根据权利要求1所述的全自动直线焊缝机,其特征在于:所述成品出料机构(7)包括出料气缸(71),设于所述出料气缸(71)输出端上的推料板(72),以及与所述推料板(72)滑动配合的导轨(73),所述推料板(72)设置方向与所述出料气缸(71)移动方向垂直。
7.根据权利要求1所述的全自动直线焊缝机,其特征在于:所述定位旋转夹紧机构(4)包括两旋转电机(42),以及设于所述旋转电机(42)输出端上的夹紧组件(43),两所述夹紧组件(43)分别夹持板件两端,所述旋转电机(42)带动所述夹紧组件(43)转动,以使板件两端相接。
8.根据权利要求7所述的全自动直线焊缝机,其特征在于:所述夹紧组件(43)包括相对所述旋转电机(42)偏心设置的夹紧臂(431),设于所述夹紧臂(431)上的夹紧气缸(432),以及由所述夹紧气缸(432)驱动的夹紧件(433)。
9.根据权利要求7所述的全自动直线焊缝机,其特征在于:所述定位旋转夹紧机构(4)还包括横移机构(41),所述旋转电机(42)设于所述横移机构(41)上,所述横移机构(41)带动所述夹紧组件(43)相互靠近,以使板件两端相接。
10.根据权利要求3所述的全自动直线焊缝机,其特征在于:所述前后移动模组(9)同步驱动所述激光焊接机构(1)和所述夹爪机构(3)。
技术总结
本发明的全自动直线焊缝机,包括激光焊接机构;双工位进料机构;夹爪机构;定位旋转夹紧机构;板料顶托机构;定位机构;成品出料机构;所述夹爪机构从所述双工位进料机构上抓取板料后放置在所述板料顶托机构上,所述定位机构将该板料定位于夹持位置后,所述定位旋转夹紧机构对该板料进行夹持并弯曲,所述激光焊接机构对该板料进行直线焊接以形成壶身,所述成品出料机构将该壶身推出。本发明提供了全自动直线焊缝机,整个过程全动化处理,减少人工操作,提高生产效率。
技术研发人员:张勇
受保护的技术使用者:中山市华拓电子设备有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!