本发明涉及自动焊接,更具体的说是涉及一种基于指示引导的自动焊接系统及方法。
背景技术:
1、传统的人工焊接,焊接质量一致性差、工人劳动强度较大、焊接对人眼危害大等问题突出,且长时间的焊接作业难以实现较好的焊接一致性。
2、传统的自动焊接系统采用结构光、线激光等视觉方式对焊接件进行自动识别,通过自动识别焊缝特征,系统进行路径规划后实现自动焊接,但是实际产线上,由于钢构件表面反光较强,结构光等视觉系统需要在较好的角度进行检测才能获得完整的特征信息,受工件本身的二次反射和环境光影响较大,通常不能准确无误的进行自动焊接。
3、由于传统的自动焊接系统采用单相机,在没有外部相机探测的情况下,焊接过程中路径规划无法实时进行避障,容易撞到。因此,复杂工件的自动焊接难以实现,大场景的自动焊接也难以实现。
4、传统的焊接路径指示方式经常采用人工示教等方式,操作复杂,速度慢,工人不容易掌握。
5、因此,如何优化对复杂工件和大型工件的自动焊接方式,提高精确度以及避免焊件表面反光带来的环境影响是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于指示引导的自动焊接系统及方法,能够在焊接指示枪的辅助引导下实现焊接位置和姿态的确认,避免了对工件特征的识别,进而更容易胜任复杂工件的焊接任务。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种基于指示引导的自动焊接系统,包括:
4、焊接机器人,所述焊接机器人一端具有焊枪;
5、焊接指示枪,用于以特定位姿指向目标焊接点;
6、视觉子系统,用于采集所述焊接指示枪图像,确定目标焊接点的位姿,并根据焊接指示枪指示的目标焊接点的位姿和焊枪位姿生成所述焊接机器人的运动轨迹。
7、优选的,所述焊接机器人包括:机械臂、所述焊枪和载物平台;
8、所述机械臂的一端固定在所述载物平台上,另一端连接所述焊枪;
9、所述载物平台用于置放焊件。
10、优选的,所述视觉子系统设置于所述载物平台上或者机械臂上。
11、优选的,所述视觉子系统包括壳体、相机、闪光灯和区域指示灯;所述相机和所述闪光灯设置于所述壳体内部;所述区域指示灯设置于所述壳体上,用于通过发射可见光,用于指示所述相机的图像采集区域。
12、优选的,所述焊接指示枪包括指示部件和视觉定位部件;所述指示部件与所述视觉定位部件固定连接;
13、所述指示部件与焊件的目标焊接点接触;
14、当所述指示部件与焊件的目标焊接点接触时,所述视觉子系统采集所述视觉定位部件的图像,通过识别所述视觉定位部件上的标记点,并通过预先标定的视觉定位部件标定参数,计算所述指示部件的位置和姿态。
15、优选的,所述视觉定位部件包括视觉定位板,所述视觉定位板的一端连接所述指示部件;所述视觉定位板的表面用于设置所述标记点,所述标记点采用高亮材料或装置制成,所述视觉定位板连接有手持部。
16、优选的,所述标记点上附着有特定形状、特征点或不同颜色的标记;
17、所述特定形状包括圆环、棋盘格或条纹;所述特征点包括角点、线交点或纹理。
18、优选的,所述手持部为腔体结构,所述手持部的腔体内安装有充电接口、信号发射单元、指示开关和电源总开关。
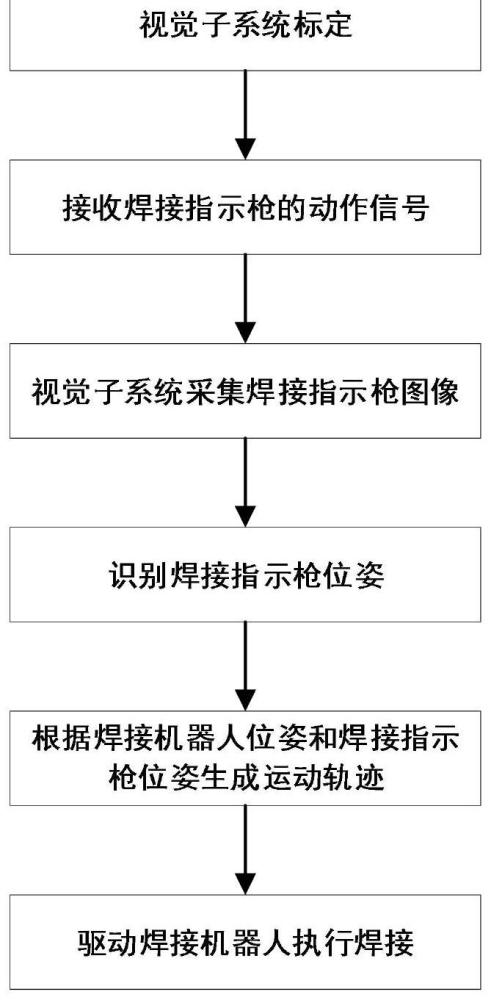
19、一种基于指示引导的自动焊接方法,包括以下步骤:
20、通过焊接指示枪以特定姿态指向目标焊接点;
21、获取一张或者多张所述焊接指示枪的图像,识别所述焊接指示枪的位置和姿态,得到一个或者多个第一位姿;
22、根据机械臂关节角度得到第二位姿;
23、生成由所述第二位姿到所述第一位姿的运动轨迹;将第一位姿生成的运动轨迹通过手眼标定转换到机器人坐标系;
24、控制焊接机器人按照运动轨迹运动到目标焊接点,并根据一个或者多个第一位姿连线生成的运动轨迹,执行自动焊接。
25、优选的,所述识别所述焊接指示枪的位置和姿态,包括:
26、识别所述焊接指示枪中多个标记点,确认各个标记点对应标记点相机图像的像素坐标;采用pnp算法计算所述焊接指示枪的位置和姿态。
27、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于指示引导的自动焊接系统及方法,视觉子系统除了能够根据焊接机器人的图像获得焊接机器人的当前位置和姿态外,还能在焊接指示枪的辅助下,获取焊接的目标位置和姿态,进而使得焊接机器人能够在焊接指示枪的引导下完成焊接。在执行焊接任务时,由人工指示的方式确认焊接点,避免了对工件特征的识别,因此,更容易胜任复杂工件的焊接任务;本发明适用于“眼在手外”和“眼在手上”的两种安装方式,可以轻松移动整套焊接机器人,进而可以实现大型焊接件的焊接;本发明中利用焊接指示枪中的标记点与视觉子系统中的相机进行标定,相机采集标记点图像即可实现引导,进而可以适用于各种反射材质表面。
技术特征:1.一种基于指示引导的自动焊接系统,其特征在于,包括:
2.根据权利要求1所述的一种基于指示引导的自动焊接系统,其特征在于,所述焊接机器人包括:机械臂、所述焊枪和载物平台;
3.根据权利要求2所述的一种基于指示引导的自动焊接系统,其特征在于,所述视觉子系统设置于所述载物平台上或者机械臂上。
4.根据权利要求1或3所述的一种基于指示引导的自动焊接系统,其特征在于,所述视觉子系统包括壳体、相机、闪光灯和区域指示灯;所述相机和所述闪光灯设置于所述壳体内部;所述区域指示灯设置于所述壳体上,用于通过发射可见光,指示所述相机的图像采集区域。
5.根据权利要求1所述的一种基于指示引导的自动焊接系统,其特征在于,所述焊接指示枪包括指示部件和视觉定位部件;所述指示部件与所述视觉定位部件固定连接;
6.根据权利要求5所述的一种基于指示引导的自动焊接系统,其特征在于,所述视觉定位部件包括视觉定位板,所述视觉定位板的一端连接所述指示部件;所述视觉定位板的表面用于设置所述标记点,所述标记点采用高亮材料或装置制成,所述视觉定位板连接有手持部。
7.根据权利要求6所述的一种基于指示引导的自动焊接系统,其特征在于,所述标记点上附着有特定形状、特征点或不同颜色的标记;
8.根据权利要求6所述的一种基于指示引导的自动焊接系统,其特征在于,所述手持部为腔体结构,所述手持部的腔体内安装有充电接口、信号发射单元、指示开关和电源总开关。
9.一种基于指示引导的自动焊接方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的一种基于指示引导的自动焊接方法,其特征在于,所述识别所述焊接指示枪的位置和姿态,包括:
技术总结本发明具体涉及一种基于指示引导的自动焊接系统及方法,系统包括焊接机器人,所述焊接机器人一端具有焊枪;焊接指示枪,用于以特定位姿指向目标焊接点;视觉子系统,用于采集所述焊接指示枪,确定目标焊接点的位姿,并根据焊接指示枪指示的目标焊接点的位姿和焊枪位姿生成所述焊接机器人的运动轨迹;视觉子系统能在焊接指示枪的辅助下,获取焊接的目标位置和姿态,进而使得焊接机器人能够在焊接指示枪的引导下完成焊接。在执行焊接任务时,由人工指示的方式确认焊接点,避免了对工件特征的识别,因此,更容易胜任复杂工件的焊接任务。
技术研发人员:代冰
受保护的技术使用者:深圳市圳阳精密技术有限公司
技术研发日:技术公布日:2024/5/16