一种用于狭窄空间作业的串并联焊接机器人的制作方法
本发明涉及自动焊接机器人,尤其涉及一种用于狭窄空间作业的串并联焊接机器人。
背景技术:
1、焊接已发展成为制造业的重要加工方法之一,在工业生产中发挥着重要作用。而随着自动化生产线和机器人技术的快速发展,焊接机器人得以被广泛应用。但是对于狭窄部件(如:长深的狭窄箱体)的焊接作业,由于现有的焊接机器人整体体积大且笨重,机械臂对狭窄箱体内部的门字形焊缝的焊接作业受限,焊接困难,有的焊接机械臂甚至无法进入狭窄部件内作业,因此,现有的焊接机器人难以满足对狭窄部件内部的焊接生产需求,这导致目前很多狭窄部件内部结构的焊接还是采用人工焊接的方式。而焊接作业现场通常条件恶劣,不仅存在高温、高湿度等环境因素,还有粉尘和噪音等危害,这些都严重威胁到工人的健康。特别是对狭窄部件内部低位置结构进行焊接工作时,工人需要长时间保持半蹲的姿势,这不仅会降低焊接作业的质量,也会大幅增加工人的劳动负担。鉴于上述现状,开发一种适用于狭窄空间作业的焊接机械臂显得尤为迫切。
技术实现思路
1、本发明所要解决的技术问题是提供一种用于狭窄空间作业的串并联焊接机器人,其可代替人工对狭窄部件内部进行焊接作业,提高了焊接质量和焊接效率。
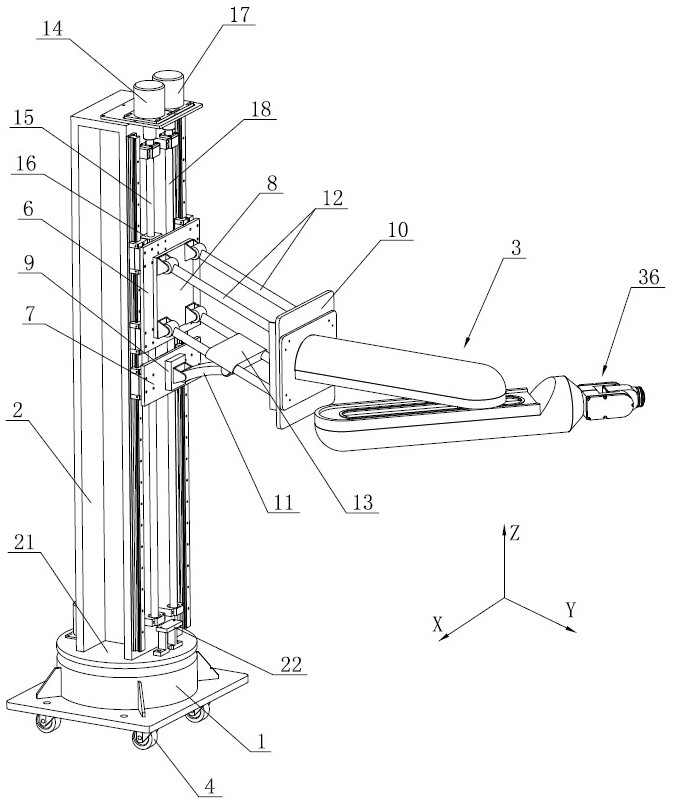
2、本发明解决上述技术问题所采用的技术方案为:一种用于狭窄空间作业的串并联焊接机器人,包括底座、立杆和具有多自由度的机械臂组件,所述的底座上设置有立杆旋转驱动机构,使得立杆可绕z轴旋转,所述的机械臂组件与所述的立杆之间设置有并联延伸机构,使得所述的机械臂组件可沿z向长距离移动以及沿y向短距离移动。
3、进一步地,所述的并联延伸机构包括第一滑板、第二滑板、并联安装板、支撑安装板、延伸平台板、支撑杆和两组上下平行设置的连杆组,所述的连杆组包括两根沿x向间隔分布且平行设置的连杆,所述的连杆的一端与所述的并联安装板相铰接、另一端与所述的延伸平台板相铰接,使得所述的连杆与所述的并联安装板之间、连杆与延伸平台板之间均相对绕x轴旋转,所述的机械臂组件固定在所述的延伸平台板上,其中一组连杆组的两根连杆上固定设置有支撑板,所述的支撑杆的一端与所述的支撑板相铰接、另一端与所述的支撑安装板相铰接,使得所述的支撑杆与支撑板之间、支撑杆与支撑安装板之间均相对绕x轴旋转,所述的并联安装板与所述的第一滑板相固定,所述的支撑安装板与所述的第二滑板相固定,所述的第一滑板和第二滑板上下排列且均与所述的立杆上下滑动配合,所述的立杆上设置有第一滑板移动驱动机构和第二滑板移动驱动机构,这使得并联延伸机构中的并联安装板和支撑安装板的上下移动可单独控制,从而可精确控制并联延伸机构的位置和姿态。
4、进一步地,所述的第一滑板移动驱动机构包括第一电机、第一丝杠和第一螺母块,所述的第一电机固定在所述的立杆上,所述的第一丝杠与所述的立杆转动连接,所述的第一电机的驱动轴与所述的第一丝杠同轴固定,所述的第一螺母块与所述的第一丝杠相螺接,所述的第一螺母块与所述的第一滑板相固定,以驱动所述的第一滑板上下移动。
5、进一步地,所述的第二滑板移动驱动机构包括第二电机、第二丝杠和第二螺母块,所述的第二电机固定在所述的立杆上,所述的第二丝杠与所述的立杆转动连接且与所述的第一丝杠相平行,所述的第二电机的驱动轴与所述的第二丝杠同轴固定,所述的第二螺母块与所述的第二丝杠相螺接,所述的第二螺母块与所述的第二滑板相固定,以驱动所述的第二滑板上下移动。
6、进一步地,所述的立杆的下端固定设置有限位块,所述的限位块的上端面设置有弹性缓冲垫。
7、进一步地,所述的机械臂组件具有五自由度。
8、进一步地,所述的机械臂组件包括第一连接臂和第二连接臂,所述的第一连接臂的后端与所述的延伸平台板相固定,所述的第一连接臂的前端内固定设置有第一旋转关节,所述的第二连接臂内固定设置有直线模组,所述的直线模组上的滑台连接板与所述的第一旋转关节相固定,使得所述的第二连接臂可绕z轴旋转以及可沿y向移动,所述的第二连接臂的前端固定设置有第二旋转关节,所述的第二旋转关节上固定连接有末端关节,使得所述的末端关节可绕y轴旋转,所述的末端关节具有二自由度。
9、进一步地,所述的末端关节包括第一关节座、第二关节座、第三电机和第四电机,所述的第一关节座与所述的第二旋转关节相固定,所述的第三电机固定在所述的第一关节座内,所述的第二关节座转动连接在所述的第一关节座上且相对所述的第一关节座绕x轴旋转,所述的第三电机通过皮带轮组件带动所述的第二关节座绕x轴旋转,所述的第四电机固定在所述的第二关节座内,所述的第四电机的驱动轴通过减速器带动焊枪绕y轴旋转。
10、进一步地,所述的立杆旋转驱动机构包括第五电机、主动齿轮和从动齿轮,所述的立杆的下端固定设置有立杆座,所述的第五电机固定在所述的立杆座上,所述的第五电机的驱动轴与所述的主动齿轮同轴固定,所述的从动齿轮与所述的底座相固定,所述的立杆座与所述的从动齿轮同轴转动连接,所述的主动齿轮与所述的从动齿轮相啮合。
11、进一步地,所述的底座的下端设置有万向轮。
12、与现有技术相比,本发明的优点是:
13、(1)、由于机械臂组件与立杆之间设置有并联延伸机构,使得机械臂组件可沿z向长距离移动以及沿y向短距离移动,该机构不仅防止了串联机械臂在焊接过程中耦合现象的发生,确保了机械臂的运动和控制精度,提高了机器人的焊接质量,而且还提高了焊接机器人整体的刚度;
14、(2)、本发明的焊接机器人设计了两个绕z轴的旋转自由度,在保持机械臂组件与狭窄部件内部的接触面平行的同时,还可以进行多角度的旋转焊接,增加了焊接作业的灵活性和适应性;
15、(3)、由于机械臂组件既具备旋转自由度也具备平移自由度,使得机械臂组件能够轻易的进入狭窄部件(如:长深箱体)的内部,并在有限的空间内对门字形焊缝等难焊接部位进行精确的焊接作业。
技术特征:
1.一种用于狭窄空间作业的串并联焊接机器人,包括底座、立杆和具有多自由度的机械臂组件,所述的底座上设置有立杆旋转驱动机构,使得立杆可绕z轴旋转,所述的机械臂组件与所述的立杆之间设置有并联延伸机构,使得所述的机械臂组件可沿z向长距离移动以及沿y向短距离移动;其特征在于:所述的并联延伸机构包括第一滑板、第二滑板、并联安装板、支撑安装板、延伸平台板、支撑杆和两组上下平行设置的连杆组,所述的连杆组包括两根沿x向间隔分布且平行设置的连杆,所述的连杆的一端与所述的并联安装板相铰接、另一端与所述的延伸平台板相铰接,使得所述的连杆与所述的并联安装板之间、连杆与延伸平台板之间均相对绕x轴旋转,所述的机械臂组件固定在所述的延伸平台板上,其中一组连杆组的两根连杆上固定设置有支撑板,所述的支撑杆的一端与所述的支撑板相铰接、另一端与所述的支撑安装板相铰接,使得所述的支撑杆与支撑板之间、支撑杆与支撑安装板之间均相对绕x轴旋转,所述的并联安装板与所述的第一滑板相固定,所述的支撑安装板与所述的第二滑板相固定,所述的第一滑板和第二滑板上下排列且均与所述的立杆上下滑动配合,所述的立杆上设置有第一滑板移动驱动机构和第二滑板移动驱动机构。
2.如权利要求1所述的一种用于狭窄空间作业的串并联焊接机器人,其特征在于:所述的第一滑板移动驱动机构包括第一电机、第一丝杠和第一螺母块,所述的第一电机固定在所述的立杆上,所述的第一丝杠与所述的立杆转动连接,所述的第一电机的驱动轴与所述的第一丝杠同轴固定,所述的第一螺母块与所述的第一丝杠相螺接,所述的第一螺母块与所述的第一滑板相固定,以驱动所述的第一滑板上下移动。
3.如权利要求2所述的一种用于狭窄空间作业的串并联焊接机器人,其特征在于:所述的第二滑板移动驱动机构包括第二电机、第二丝杠和第二螺母块,所述的第二电机固定在所述的立杆上,所述的第二丝杠与所述的立杆转动连接且与所述的第一丝杠相平行,所述的第二电机的驱动轴与所述的第二丝杠同轴固定,所述的第二螺母块与所述的第二丝杠相螺接,所述的第二螺母块与所述的第二滑板相固定,以驱动所述的第二滑板上下移动。
4.如权利要求1所述的一种用于狭窄空间作业的串并联焊接机器人,其特征在于:所述的立杆的下端固定设置有限位块,所述的限位块的上端面设置有弹性缓冲垫。
5.如权利要求1所述的一种用于狭窄空间作业的串并联焊接机器人,其特征在于:所述的机械臂组件具有五自由度。
6.如权利要求5所述的一种用于狭窄空间作业的串并联焊接机器人,其特征在于:所述的机械臂组件包括第一连接臂和第二连接臂,所述的第一连接臂的后端与所述的延伸平台板相固定,所述的第一连接臂的前端内固定设置有第一旋转关节,所述的第二连接臂内固定设置有直线模组,所述的直线模组上的滑台连接板与所述的第一旋转关节相固定,使得所述的第二连接臂可绕z轴旋转以及可沿y向移动,所述的第二连接臂的前端固定设置有第二旋转关节,所述的第二旋转关节上固定连接有末端关节,使得所述的末端关节可绕y轴旋转,所述的末端关节具有二自由度。
7.如权利要求6所述的一种用于狭窄空间作业的串并联焊接机器人,其特征在于:所述的末端关节包括第一关节座、第二关节座、第三电机和第四电机,所述的第一关节座与所述的第二旋转关节相固定,所述的第三电机固定在所述的第一关节座内,所述的第二关节座转动连接在所述的第一关节座上且相对所述的第一关节座绕x轴旋转,所述的第三电机通过皮带轮组件带动所述的第二关节座绕x轴旋转,所述的第四电机固定在所述的第二关节座内,所述的第四电机的驱动轴通过减速器带动焊枪绕y轴旋转。
8.如权利要求1所述的一种用于狭窄空间作业的串并联焊接机器人,其特征在于:所述的立杆旋转驱动机构包括第五电机、主动齿轮和从动齿轮,所述的立杆的下端固定设置有立杆座,所述的第五电机固定在所述的立杆座上,所述的第五电机的驱动轴与所述的主动齿轮同轴固定,所述的从动齿轮与所述的底座相固定,所述的立杆座与所述的从动齿轮同轴转动连接,所述的主动齿轮与所述的从动齿轮相啮合。
9.如权利要求1所述的一种用于狭窄空间作业的串并联焊接机器人,其特征在于:所述的底座的下端设置有万向轮。
技术总结
本发明公开了一种用于狭窄空间作业的串并联焊接机器人,特点是包括底座、立杆和具有多自由度的机械臂组件,底座上设置有立杆旋转驱动机构,使得立杆可绕Z轴旋转,机械臂组件与立杆之间设置有并联延伸机构,使得机械臂组件可沿Z向长距离移动以及沿Y向短距离移动;优点是由于机械臂组件与立杆之间设置有并联延伸机构,该机构不仅防止了串联机械臂在焊接过程中耦合现象的发生,确保了机械臂的运动和控制精度,提高了机器人的焊接质量,而且还提高了焊接机器人整体的刚度。
技术研发人员:缪海楠,茅建军,曾盛明
受保护的技术使用者:金丰(中国)机械工业有限公司
技术研发日:
技术公布日:2024/7/15
- 还没有人留言评论。精彩留言会获得点赞!