柔性化机器人点焊枪的制作方法
本发明涉及点焊枪,尤其为柔性化机器人点焊枪。
背景技术:
1、点焊机器人(spot welding robot) 用于点焊自动作业的工业机器人。世界上第一台点焊机于1965年开始使用,是美国unimation公司推出的unimate机器人,中国在1987年自行研制成第一台点焊机器人──华宇-ⅰ型点焊机器人。点焊机器人由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成,由于为了适应灵活动作的工作要求,通常电焊机器人选用关节式工业机器人的基本设计,一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。其驱动方式有液压驱动和电气驱动两种。其中电气驱动具有保养维修简便、能耗低、速度高、精度高、安全性好等优点,因此应用较为广泛。点焊机器人按照示教程序规定的动作、顺序和参数进行点焊作业,其过程是完全自动化的,并且具有与外部设备通信的接口,可以通过这一接口接受上一级主控与管理计算机的控制命令进行工作。点焊机器人最先大规模使用的区域将绘出如今发达地区。随着产业转移的进行,发达地区的制造业需要提升。基于工人成本不断增长的现实,点焊机器人的应用成为最好替代方式。未来我国点焊机器人的大范围应用将会集中在广东、江苏、上海、北京等地,其点焊机器人拥有量将占全国一半以上。日益增长的点焊机器人市场以及巨大的市场潜力吸引世界着名机器人生产厂家的目光。当前,我国进口的点焊机器人主要来自日本,但是随着诸如“机器人”类似的具有自有知识产权的企业不断出现,越来越多的点焊机器人将会由中国制造。技术综合性强工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化以及精细物流等先进制造技术,技术综合性强。应用领域广泛工业机器人与自动化成套装备是生产过程的关键设备,可用于制造、安装、检测、物流等生产环节,并广泛应用于汽车整车及汽车零部件、工程机械、轨道交通、低压电器、电力、ic装备、军工、烟草、金融、医药、冶金及印刷出版等众多行业,应用领域非常广泛。技术先进工业机器人集精密化、柔性化、智能化、软件应用开发等先进制造技术于一体,通过对过程实施检测、控制、优化、调度、管理和决策,实现增加产量、提高质量、降低成本、减少资源消耗和环境污染,是工业自动化水平的最高体现。技术升级工业机器人与自动化成套装备具备精细制造、精细加工以及柔性生产等技术特点,是继动力机械、计算机之后,出现的全面延伸人的体力和智力的新一代生产工具,是实现生产数字化、自动化、网络化以及智能化的重要手段。
2、随着点焊机器人的快速发展,越来越多的点焊机器人投入到生产使用中,对其要求越来越高,它的弊端与不足也随之凸显出来,传统的点焊机器人大都采用一体式电极臂进行焊接,如果电极臂的局部出现故障,则需将整根电极臂全部拆除,更换全新的电极臂,不仅不能使电极臂物尽其用,还增加了采购整根电极臂的成本,降低企业利润。
技术实现思路
1、本发明的主要目的在于提供柔性化机器人点焊枪,通过采用二段式电极臂,增加柔性化处理,解决电极臂局部出现故障需将整根电极臂全部拆除并更换全新电极臂的问题,以达到物尽其用、节约成本、减轻企业经济负担的效果。
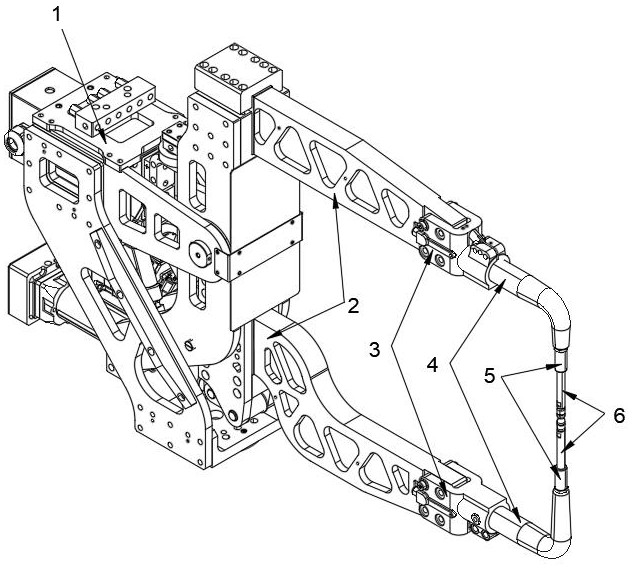
2、为了实现上述目的,根据本发明的一个方面,提供了柔性化机器人点焊枪,包括焊枪体、焊接臂、电极主座、电极臂、电机座和电极杆,所述焊枪体与焊接臂通过螺栓连接,所述焊接臂与电极主座通过螺栓连接,所述电极主座与电极臂通过螺栓连接,所述电极臂与电机座螺纹连接,所述电机座与电极杆螺纹连接。
3、进一步地,所述焊接臂包括焊接臂尾、孔洞和焊接臂头,所述焊接臂尾设有焊接臂尾螺孔,所述焊接臂尾螺孔贯穿焊接臂尾,所述焊接臂头设有焊接臂头螺孔,所述焊接臂头螺孔贯穿焊接臂头,所述孔洞贯穿焊接臂。
4、进一步地,所述焊接臂头设有电极主座,所述电极主座包括u型端和o型端,所述u型端设有u型端腔,所述o型端设有o型端腔,所述u型端和o型端均设有电极主座螺孔,所述电极主座螺孔贯穿u型端和o型端,所述u型端的电极主座螺孔与焊接臂头螺孔一一对应。
5、进一步地,所述电极主座螺孔中均设有螺栓,所述螺栓与电极主座螺孔螺纹连接,所述o型端底部设有裂缝,所述裂缝将o型端底部分为两部分。
6、进一步地,所述o型端腔内设有电极臂,所述电极臂包括电极臂身和电极臂尾,所述电极臂身与电极臂尾相互垂直且固定连接,所述电极臂尾顶部设有电极臂尾腔,所述电极臂尾腔内设有螺纹。
7、进一步地,所述电极臂身一端对称设有电极臂螺孔,所述电极臂螺孔贯穿电极臂身且与o型端的一个电极主座螺孔对应,所述电极臂身与电极臂螺孔相同的一端设有凹槽,所述凹槽环绕电极臂身一圈。
8、进一步地,所述电极臂尾腔内设有电机座,所述电机座包括电机座头,所述电机座头设于电极臂尾腔内,且所述电机座头与电极臂尾螺纹连接。
9、进一步地,所述电机座头上方设有六棱体,所述六棱体与电机座头固定连接,所述六棱体上方设有电机座身,所述电机座身与六棱体固定连接,所述电机座身上方设有电机座身腔,所述电机座身腔内设有螺纹。
10、进一步地,所述电机座身腔内设有电极杆,所述电极杆包括电极杆体和电极杆头,所述电极杆头包括底圈,所述底圈内设有螺纹,所述底圈上方设有半球顶,所述半球顶与底圈固定连接,所述半球顶顶部设有平顶。
11、进一步地,所述电极杆体包括电极杆体尾,所述电极杆体尾与电机座螺纹连接,所述电极杆体尾上方设有电极杆身,所述电极杆身与电极杆体尾固定连接,所述电极杆身上端两侧对称设有卡口,所述电极杆身上端顶部设有电极杆体头,所述电极杆体头与底圈螺纹连接。
12、与现有技术相比,本发明具有以下有益效果:
13、1、本发明的焊枪体与焊接臂、焊接臂与电极主座、电极主座与电极臂之间均由螺栓连接,连接紧固可靠且便于拆卸更换,本发明的电极臂与电机座、电机座与电极杆体、电极杆体与电极杆头之间均由螺纹连接,可提供可靠的连接也便于拆卸更换,如果其中一个或几个部件出现故障,可单独拆下故障部位,更换新的配件即可,不需要将整根机械手臂拆下更换,使各个部件都能物尽其用,降低采购配件的成本,提高企业利润。
14、2、通过柔性化机器人点焊枪,在工作过程中提高了点焊枪的可达性,使得其解决了小批量多品种的生产模式。
15、3、由于焊枪属于非标设备,可实现非标设备重复使用,提高了利用率。
技术特征:
1.柔性化机器人点焊枪,包括焊枪体(1)、焊接臂(2)、电极主座(3)、电极臂(4)、电机座(5)和电极杆(6),其特征在于,所述焊枪体(1)与焊接臂(2)通过螺栓连接,所述焊接臂(2)与电极主座(3)通过螺栓连接,所述电极主座(3)与电极臂(4)通过螺栓连接,所述电极臂(4)与电机座(5)螺纹连接,所述电机座(5)与电极杆(6)螺纹连接。
2.根据权利要求1所述的柔性化机器人点焊枪,其特征在于,所述焊接臂(2)包括焊接臂尾(201)、孔洞(202)和焊接臂头(203),所述焊接臂尾(201)设有焊接臂尾螺孔(205),所述焊接臂尾螺孔(205)贯穿焊接臂尾(201),所述焊接臂头(203)设有焊接臂头螺孔(204),所述焊接臂头螺孔(204)贯穿焊接臂头(203),所述孔洞(202)贯穿焊接臂(2)。
3.根据权利要求2所述的柔性化机器人点焊枪,其特征在于,所述焊接臂头(203)设有电极主座(3),所述电极主座(3)包括u型端(301)和o型端(305),所述u型端(301)设有u型端腔(302),所述o型端(305)设有o型端腔(306),所述u型端(301)和o型端(305)均设有电极主座螺孔(303),所述电极主座螺孔(303)贯穿u型端(301)和o型端(305),所述u型端(301)的电极主座螺孔(303)与焊接臂头螺孔(204)一一对应。
4.根据权利要求3所述的柔性化机器人点焊枪,其特征在于,所述电极主座螺孔(303)中均设有螺栓(304),所述螺栓(304)与电极主座螺孔(303)螺纹连接,所述o型端(305)底部设有裂缝(307),所述裂缝(307)将o型端(305)底部分为两部分。
5.根据权利要求4所述的柔性化机器人点焊枪,其特征在于,所述o型端腔(306)内设有电极臂(4),所述电极臂(4)包括电极臂身(401)和电极臂尾(402),所述电极臂身(401)与电极臂尾(402)相互垂直且固定连接,所述电极臂尾(402)顶部设有电极臂尾腔(405),所述电极臂尾腔(405)内设有螺纹。
6.根据权利要求5所述的柔性化机器人点焊枪,其特征在于,所述电极臂身(401)一端对称设有电极臂螺孔(403),所述电极臂螺孔(403)贯穿电极臂身(401)且与o型端(305)的一个电极主座螺孔(303)对应,所述电极臂身(401)与电极臂螺孔(403)相同的一端设有凹槽(404),所述凹槽(404)环绕电极臂身(401)一圈。
7.根据权利要求6所述的柔性化机器人点焊枪,其特征在于,所述电极臂尾腔(405)内设有电机座(5),所述电机座(5)包括电机座头(501),所述电机座头(501)设于电极臂尾腔(405)内,且所述电机座头(501)与电极臂尾(402)螺纹连接。
8.根据权利要求7所述的柔性化机器人点焊枪,其特征在于,所述电机座头(501)上方设有六棱体(502),所述六棱体(502)与电机座头(501)固定连接,所述六棱体(502)上方设有电机座身(503),所述电机座身(503)与六棱体(502)固定连接,所述电机座身(503)上方设有电机座身腔(504),所述电机座身腔(504)内设有螺纹。
9.根据权利要求8所述的柔性化机器人点焊枪,其特征在于,所述电机座身腔(504)内设有电极杆(6),所述电极杆(6)包括电极杆体(601)和电极杆头(602),所述电极杆头(602)包括底圈(6021),所述底圈(6021)内设有螺纹,所述底圈(6021)上方设有半球顶(6022),所述半球顶(6022)与底圈(6021)固定连接,所述半球顶(6022)顶部设有平顶(6023)。
10.根据权利要求9所述的柔性化机器人点焊枪,其特征在于,所述电极杆体(601)包括电极杆体尾(6011),所述电极杆体尾(6011)与电机座(5)螺纹连接,所述电极杆体尾(6011)上方设有电极杆身(6012),所述电极杆身(6012)与电极杆体尾(6011)固定连接,所述电极杆身(6012)上端两侧对称设有卡口(6013),所述电极杆身(6012)上端顶部设有电极杆体头(6014),所述电极杆体头(6014)与底圈(6021)螺纹连接。
技术总结
本发明涉及点焊枪技术领域,具体涉及柔性化机器人点焊枪,本发明包括焊枪体、焊接臂、电极主座、电极臂、电机座和电极杆,焊枪体与焊接臂、焊接臂与电极主座、电极主座与电极臂之间均由螺栓连接,连接紧固可靠且便于拆卸更换,本发明的电极臂与电机座、电机座与电极杆体、电极杆体与电极杆头之间均由螺纹连接,大的构件间用螺栓连接,螺栓提供额外的支撑力,使构件间连接更加紧固可靠且便于拆卸更换,小的构件间用螺纹连接,小构件自重小,螺纹便可提供足够的支撑力,如果其中一个或几个部件出现故障,可单独拆下故障部位,更换新的配件即可,不需要将整根机械手臂拆下更换,使各个部件都能物尽其用,降低采购配件的成本,提高企业利润。
技术研发人员:王大明,廖晚来
受保护的技术使用者:苏州广金通智能科技有限公司
技术研发日:
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!