一种工业焊接机器人
本发明涉及焊接机器人,特别涉及一种工业焊接机器人。
背景技术:
1、焊接是一种将材料永久连接,并成为具有给定功能结构的制造技术,几乎所有的产品,从几十万吨巨轮到不足1克的微电子元件,在生产中都不同程度地依赖焊接技术,焊接已经渗透到制造业的各个领域,直接影响到产品的质量、可靠性和寿命以及生产的成本、效率和市场反应速度。
2、现有的焊接机器人在焊接时会产生很多焊渣,粘黏在工作台表面,若不及时清理将会造成下一工件放置时不够平整,造成焊接过程中的接触不稳定,导致焊接接头的质量和精度下降,焊缝不均匀,焊接偏差。
3、因此,有必要提供一种工业焊接机器人解决上述技术问题。
技术实现思路
1、本发明的目的在于提供一种工业焊接机器人,以解决上述背景技术中提出的现有技术的缺陷焊接机器人在焊接时会产生很多焊渣,粘黏在工作台表面,若不及时清理将会造成下一工件放置时不够平整,造成焊接过程中的接触不稳定,导致焊接接头的质量和精度下降,焊缝不均匀,焊接偏差等问题。
2、基于上述思路,本发明提供如下技术方案:包括机械臂、靠近所述机械臂的焊枪处设置有用于工件定位的定位板,所述定位板的两侧均设置有驱动组件,通过驱动组件驱动定位板升降,所述驱动组件的外侧设置有传动组件,通过传动组件、固定组件的配合驱动定位板翻转;所述定位板的下方设置有用于刮除定位板表面焊渣刮板,所述刮板滑动连接于工作台内壁上,所述刮板内连接有联动组件;所述联动组件包括圆杆,所述圆杆固定连接于驱动组件的一侧,所述圆杆外侧设置有套杆,所述套杆内部开设有螺纹槽,所述圆杆外侧固定连接有第二滑块,所述第二滑块的一端设置于螺纹槽内并与其滑动配合;所述套杆外侧通过单向阻尼轴承转动连接有第二往复丝杆,所述刮板通过螺母副连接于第二往复丝杆外侧,所述套杆和第二往复丝杆均转动连接于工作台内壁。
3、作为本发明进一步的方案:所述驱动组件包括电动推杆,所述电动推杆固定安装于工作台的侧壁上,所述电动推杆的输出端可拆卸连接有支撑架,所述支撑架固定连接圆杆的一侧,所述支撑架的一侧固定连接有第一齿条,所述第一齿条的一侧啮合连接有第一齿轮,所述第一齿轮内部通过单向阻尼轴承转动连接有第一往复丝杆,所述第一往复丝杆外侧通过螺母副连接有第一滑块,所述第一滑块滑动连接于工作台内壁,所述第一滑块的一侧转动连接有转动轴,所述转动轴与定位板固定。
4、作为本发明进一步的方案:所述传动组件包括第二齿轮,所述第二齿轮通过单向阻尼轴承转动连接于转动轴外侧,位于所述工作台内部下表面安装有与第二齿轮啮合的第二齿条。
5、作为本发明进一步的方案:所述工作台的上表面设置有用于对定位板限位的限位组件,所述限位组件包括支撑板,所述支撑板的一端固定连接于工作台的上表面,所述支撑板内开设有限位槽,所述转动轴贯穿限位槽;
6、所述转动轴外侧固定连接有限位块,所述限位块的一端设置于限位槽内并与限位槽滑动配合。
7、作为本发明进一步的方案:位于所述定位板上方的两侧均设置有固定组件,所述固定组件包括固定板,所述固定板的一端设置于支撑架内并与其滑动配合,所述支撑架与固定板之间通过弹簧固定。
8、作为本发明进一步的方案:所述工作台的截面形状设置为凸形,且所述工作台远离机械臂的一面贯穿开设有凹槽。
9、作为本发明进一步的方案:所述定位板的正下方设置有用于输送工件的输送装置,所述输送装置朝着远离机械臂的方向输送;
10、所述输送装置包括输送带、传动辊和驱动电机,所述驱动电机与传动辊相连接,所述输送带设置于传动辊外侧;
11、所述输送带的表面安装有防护垫,所述防护垫为软性材料制成。
12、作为本发明进一步的方案:所述焊接机器人还包括控制器、传动机构、传感器、原动机构,所述控制器、传动机构、传感器、原动机构彼此电性连接;所述机械臂与焊枪可拆卸连接;所述工作台与机械臂间可拆卸连接;所述电动推杆与控制器电性连接。
13、作为本发明进一步的方案:所述定位板设置于工作台内,且所述定位板的四周均与工作台的内壁存在间隙。
14、与现有技术相比,本发明的有益效果是,通过驱动组件、传动组件的配合,每焊接一件工件结束后,将粘黏有焊渣的定位板翻转朝下、同时将表面干净的一面朝上,使得下一工件放置平整,提高焊接过程中的接触稳定性,提高焊接接头的质量、精度和焊缝均匀性,减小焊接偏差,通过刮板的设置,使得焊接工作进行的同时,及时对定位板表面粘黏的焊渣及时处理,节省时间和人力。
15、与现有技术相比,本发明的有益效果是,焊接完成的工件在定位板翻转的同时,自动将焊接结束的工件进行卸料,无需等待人工卸料或配备机械手操作,节省时间,降低成本。
16、与现有技术相比,本发明的有益效果是,通过固定板的设置,使得工件在加工时更加的稳定,避免在对工件焊接时,工件晃动,影响焊接质量。
技术特征:
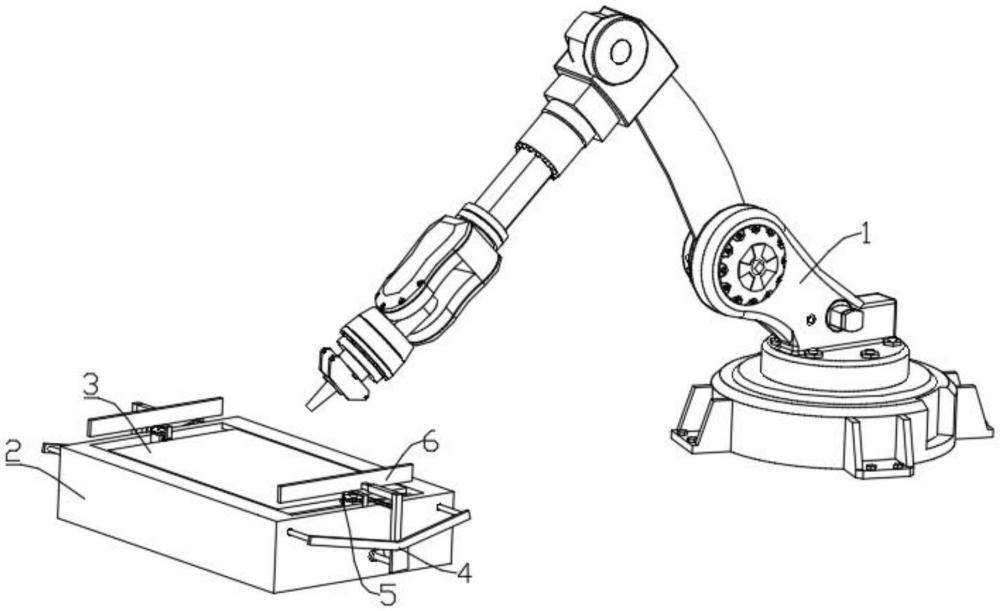
1.一种工业焊接机器人,其特征在于:包括机械臂(1)、靠近所述机械臂(1)的焊枪处设置有用于工件定位的定位板(3),所述定位板(3)的两侧均设置有驱动组件(4),通过驱动组件(4)驱动定位板(3)升降,所述驱动组件(4)的外侧设置有传动组件(5),通过传动组件(5)、固定组件(6)的配合驱动定位板(3)翻转;
2.根据权利要求1所述的一种工业焊接机器人,其特征在于:所述驱动组件(4)包括电动推杆(401),所述电动推杆(401)固定安装于工作台(2)的侧壁上,所述电动推杆(401)的输出端可拆卸连接有支撑架(402),所述支撑架(402)固定连接圆杆(901)的一侧,所述支撑架(402)的一侧固定连接有第一齿条(403),所述第一齿条(403)的一侧啮合连接有第一齿轮(404),所述第一齿轮(404)内部通过单向阻尼轴承转动连接有第一往复丝杆(405),所述第一往复丝杆(405)外侧通过螺母副连接有第一滑块(406),所述第一滑块(406)滑动连接于工作台(2)内壁,所述第一滑块(406)的一侧转动连接有转动轴(407),所述转动轴(407)与定位板(3)固定。
3.根据权利要求2所述的一种工业焊接机器人,其特征在于:所述传动组件(5)包括第二齿轮(501),所述第二齿轮(501)通过单向阻尼轴承转动连接于转动轴(407)外侧,位于所述工作台(2)内部下表面安装有与第二齿轮(501)啮合的第二齿条(502)。
4.根据权利要求3所述的一种工业焊接机器人,其特征在于:所述工作台(2)的上表面设置有用于对定位板(3)限位的限位组件(10),所述限位组件(10)包括支撑板(1001),所述支撑板(1001)的一端固定连接于工作台(2)的上表面,所述支撑板(1001)内开设有限位槽(1002),所述转动轴(407)贯穿限位槽(1002);
5.根据权利要求4所述的一种工业焊接机器人,其特征在于:位于所述定位板(3)上方的两侧均设置有固定组件(6),所述固定组件(6)包括固定板(602),所述固定板(602)的一端设置于支撑架(402)内并与其滑动配合,所述支撑架(402)与固定板(602)之间通过弹簧(601)固定。
6.根据权利要求5所述的一种工业焊接机器人,其特征在于:所述工作台(2)的截面形状设置为凸形,且所述工作台(2)远离机械臂(1)的一面贯穿开设有凹槽。
7.根据权利要求6所述的一种工业焊接机器人,其特征在于:所述定位板(3)的正下方设置有用于输送工件的输送装置(7),所述输送装置(7)朝着远离机械臂(1)的方向输送;
8.根据权利要求2所述的一种工业焊接机器人,其特征在于:所述焊接机器人还包括控制器、传动机构、传感器、原动机构,所述控制器、传动机构、传感器、原动机构彼此电性连接;
9.根据权利要求1所述的一种工业焊接机器人,其特征在于:所述定位板(3)设置于工作台(2)内,且所述定位板(3)的四周均与工作台(2)的内壁存在间隙。
技术总结
本发明涉及焊接机器人技术领域,本发明公开了一种工业焊接机器人,包括机械臂、靠近所述机械臂的焊枪处设置有用于工件定位的定位板,所述定位板的两侧均设置有驱动组件,所述驱动组件的外侧设置有传动组件;所述定位板的下方设置有用于刮除定位板表面焊渣刮板;通过驱动组件、传动组件的配合,每焊接一件工件结束后,将粘黏有焊渣的定位板翻转朝下、同时将表面干净的一面朝上,使得下一工件放置平整,提高焊接过程中的接触稳定性,提高焊接接头的质量、精度和焊缝均匀性,减小焊接偏差,通过刮板的设置,使得焊接工作进行的同时,及时对定位板表面粘黏的焊渣及时处理,节省时间和人力。
技术研发人员:王玉梅,于春苗,李建勇,张瑞林
受保护的技术使用者:德州职业技术学院(德州市技师学院)
技术研发日:
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!