一种铁塔连接梁与横担机器人焊接工作站及焊接系统的制作方法
本发明涉及机器人焊接工作站,具体为一种铁塔连接梁与横担机器人焊接工作站及焊接系统。
背景技术:
1、横担是电线杆顶部横向固定的角铁支撑架空电线,横担是杆塔中重要的组成部分,它的作用是用来安装绝缘子及金具,以支承导线、避雷线,并使之按规定保持一定的安全距离。
2、现有技术中,铁塔连接梁以及横担焊接工作量较大,通常采用焊接机器人工作站对铁塔连接梁以及横担进行焊接工作。
3、但是,传统的焊接机器人工作站体积较大,焊接机器人对具体工件进行焊接工作时通常要在工作站上设置的导轨移动并对具体工件进行焊接,焊接机器人在移动过程中会产生较大的抖动进而导致工件焊缝不均匀进而影响其连接强度降低焊接出的产品质量,为此,本发明提出一种铁塔连接梁与横担机器人焊接工作站及焊接系统来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种铁塔连接梁与横担机器人焊接工作站及焊接系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种铁塔连接梁与横担机器人焊接工作站,所述铁塔连接梁与横担机器人焊接工作站包括:底座,底座上开设有滑槽,底座侧面开设有移动槽;
3、安装架,安装架上开设有第二限位槽,安装架底面设置有固定板。
4、优选的,所述滑槽呈“凸”型槽状结构,滑槽内设置有第一螺纹杆,第一螺纹杆与底座转动连接,第一螺纹杆与滑块上的螺纹孔螺纹连接,第一螺纹杆贯穿底座侧面开设的孔与底座侧面固定连接的第一电机上的传动轴固定连接,底座两侧设置有单轴头尾式变位机。
5、优选的,所述移动槽呈方形槽状结构,移动槽内设置有滚轮,滚轮可以沿着移动槽滚动,滚轮通过轴与连接板转动连接,连接板与移动板侧面固定连接,移动板呈方形板状结构。
6、优选的,所述第二限位槽呈“凸”型槽状结构,第二限位槽内设置有第二螺纹杆,第二螺纹杆与安装架转动连接,第二螺纹杆与限位块上开设的螺纹孔螺纹连接,第二螺纹杆贯穿安装架上开设的孔与第二电机的传动轴固定连接,第二电机与安装架侧面固定连接。
7、优选的,所述固定板呈方形板状结构,固定板与安装架底面固定连接,固定板下表面固定连接有若干个限位杆,固定板上安装有第二缓冲垫,第二缓冲垫呈方形板状结构,第二缓冲垫上固定连接的卡块卡在固定板上开设的卡槽内,卡槽呈方形槽状结构。
8、优选的,所述滑块呈“凸”型板状结构,滑块设置在滑槽内,滑块可以沿着滑槽移动,滑块与移动板固定连接移动板上表面设置有第一缓冲垫,第一缓冲垫上表面设置有下安装板,下安装板与移动板以及第一缓冲垫通过螺栓螺纹连接。
9、优选的,所述限位块呈“凸”型板状结构,限位块设置在第二限位槽内,限位块可以沿着第二限位槽移动,限位块与上安装板固定连接,上安装板上安装有焊接机器人,上安装板侧面固定连接的凸块卡在安装架侧面开设的第一限位槽内,第一限位槽内呈方形槽状结构。
10、优选的,所述限位杆呈圆柱状结构,限位杆底面固定连接有橡胶垫,限位杆上固定连接有橡胶垫的一端卡在下安装板上开设的限位孔内,限位孔内呈圆形孔状结构。
11、优选的,所述下安装板上固定连接有若干弹簧,下安装板上固定连接有橡胶定位块,橡胶定位块上固定连接有金属卡板,橡胶定位块一端可以卡入固定板上开设的定位槽内,定位槽呈方形槽状结构。
12、一种焊接系统,包括所述的铁塔连接梁与横担机器人焊接工作站。
13、与现有技术相比,本发明的有益效果是:
14、本发明提出的一种铁塔连接梁与横担机器人焊接工作站及焊接系统,当安装架以及上安装板上安装的焊接机器人沿着滑槽移动时,移动板与下安装板之间设置的第一缓冲垫可以对移动时产生的抖动进行一定的缓冲,降低装置的抖动幅度,且安装架下表面固定连接的固定板与下安装板之间的弹簧发生形变,可以对抖动进行缓冲,将第二缓冲垫上固定连接的卡块对准固定板上开设的卡槽卡入,并使用螺栓贯穿第二缓冲垫上开设的孔与橡胶定位块上开设的螺纹孔螺纹连接,便将固定板与橡胶定位块固定住,装置在移动时橡胶定位块产生一定的形变移动时产生的抖动进行一定的缓冲,以上结构相互配合可以对焊接机器人在移动时产生的抖动进行缓冲,可以显著提高机器人在移动过程中的稳定性,减少抖动,从而提高焊接机器人工作时的焊接精度以及可靠性,提高焊接出的产品的质量。
技术特征:
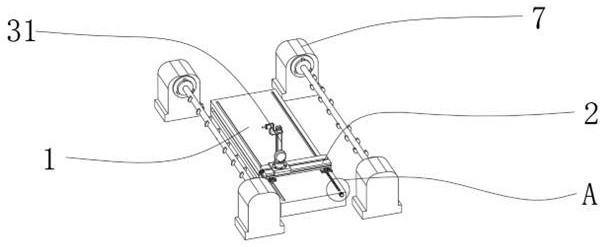
1.一种铁塔连接梁与横担机器人焊接工作站,其特征在于:所述铁塔连接梁与横担机器人焊接工作站包括:底座(1),底座(1)上开设有滑槽(4),底座(1)侧面开设有移动槽(3);
2.根据权利要求1所述的一种铁塔连接梁与横担机器人焊接工作站,其特征在于:所述滑槽(4)呈“凸”型槽状结构,滑槽(4)内设置有第一螺纹杆(6),第一螺纹杆(6)与底座(1)转动连接,第一螺纹杆(6)与滑块(8)上的螺纹孔螺纹连接,第一螺纹杆(6)贯穿底座(1)侧面开设的孔与底座(1)侧面固定连接的第一电机(5)上的传动轴固定连接,底座(1)两侧设置有单轴头尾式变位机(7)。
3.根据权利要求1所述的一种铁塔连接梁与横担机器人焊接工作站,其特征在于:所述移动槽(3)呈方形槽状结构,移动槽(3)内设置有滚轮(17),滚轮(17)可以沿着移动槽(3)滚动,滚轮(17)通过轴与连接板(16)转动连接,连接板(16)与移动板(9)侧面固定连接,移动板(9)呈方形板状结构。
4.根据权利要求1所述的一种铁塔连接梁与横担机器人焊接工作站,其特征在于:所述第二限位槽(19)呈“凸”型槽状结构,第二限位槽(19)内设置有第二螺纹杆(20),第二螺纹杆(20)与安装架(2)转动连接,第二螺纹杆(20)与限位块(21)上开设的螺纹孔螺纹连接,第二螺纹杆(20)贯穿安装架(2)上开设的孔与第二电机(22)的传动轴固定连接,第二电机(22)与安装架(2)侧面固定连接。
5.根据权利要求1所述的一种铁塔连接梁与横担机器人焊接工作站,其特征在于:所述固定板(24)呈方形板状结构,固定板(24)与安装架(2)底面固定连接,固定板(24)下表面固定连接有若干个限位杆(27),固定板(24)上安装有第二缓冲垫(29),第二缓冲垫(29)呈方形板状结构,第二缓冲垫(29)上固定连接的卡块(30)卡在固定板(24)上开设的卡槽(26)内,卡槽(26)呈方形槽状结构。
6.根据权利要求2所述的一种铁塔连接梁与横担机器人焊接工作站,其特征在于:所述滑块(8)呈“凸”型板状结构,滑块(8)设置在滑槽(4)内,滑块(8)可以沿着滑槽(4)移动,滑块(8)与移动板(9)固定连接移动板(9)上表面设置有第一缓冲垫(10),第一缓冲垫(10)上表面设置有下安装板(11),下安装板(11)与移动板(9)以及第一缓冲垫(10)通过螺栓螺纹连接。
7.根据权利要求4所述的一种铁塔连接梁与横担机器人焊接工作站,其特征在于:所述限位块(21)呈“凸”型板状结构,限位块(21)设置在第二限位槽(19)内,限位块(21)可以沿着第二限位槽(19)移动,限位块(21)与上安装板(23)固定连接,上安装板(23)上安装有焊接机器人(31),上安装板(23)侧面固定连接的凸块卡在安装架(2)侧面开设的第一限位槽(18)内,第一限位槽(18)内呈方形槽状结构。
8.根据权利要求5所述的一种铁塔连接梁与横担机器人焊接工作站,其特征在于:所述限位杆(27)呈圆柱状结构,限位杆(27)底面固定连接有橡胶垫(28),限位杆(27)上固定连接有橡胶垫(28)的一端卡在下安装板(11)上开设的限位孔(15)内,限位孔(15)内呈圆形孔状结构。
9.根据权利要求8所述的一种铁塔连接梁与横担机器人焊接工作站,其特征在于:所述下安装板(11)上固定连接有若干弹簧(14),下安装板(11)上固定连接有橡胶定位块(12),橡胶定位块(12)上固定连接有金属卡板(13),橡胶定位块(12)一端可以卡入固定板(24)上开设的定位槽(25)内,定位槽(25)呈方形槽状结构。
10.一种焊接系统,其特征在于:包括上述权利要求1-9任意一条所述的铁塔连接梁与横担机器人焊接工作站。
技术总结
本发明涉及机器人焊接工作站技术领域,具体为一种铁塔连接梁与横担机器人焊接工作站及焊接系统,包括:底座上开设有滑槽,底座侧面开设有移动槽;安装架上开设有第二限位槽,安装架底面设置有固定板;有益效果为:当焊接机器人移动时,安装架下表面固定连接的固定板与下安装板之间的弹簧发生形变,可以对抖动进行缓冲,装置在移动时橡胶定位块产生一定的形变移动时产生的抖动进行一定的缓冲,以上结构相互配合可以对焊接机器人在移动时产生的抖动进行缓冲,可以显著提高机器人在移动过程中的稳定性,减少抖动,从而提高焊接机器人工作时的焊接精度以及可靠性,提高焊接出的产品的质量。
技术研发人员:韩华,史杰,陈炎兵,刘涛,高爱美
受保护的技术使用者:青岛武晓集团股份有限公司
技术研发日:
技术公布日:2024/10/10
- 还没有人留言评论。精彩留言会获得点赞!