一种铲斗上下料桁架机器人的制作方法
本发明涉及机器人,特别涉及一种铲斗上下料桁架机器人。
背景技术:
1、在铲斗生产过程中需要将齿座从加热炉的输送线搬运到旋转变位机上进行齿部的焊接,而焊接后则需要将铲斗搬运到保温炉的输送线上进行保温作业,所以需要一种铲斗上下料桁架机器人,以便满足铲斗生产过程中自动可靠快速搬运的需要。
技术实现思路
1、本发明的目的就在于为了解决上述问题而提供一种铲斗上下料桁架机器人,解决了铲斗生产过程中自动可靠快速搬运的问题。
2、为了解决上述问题,本发明提供了一种技术方案:一种铲斗上下料桁架机器人,包括加热炉和保温炉,包括x横梁、焊接机器人、旋转变位机、立柱、多轴移动机构一、铲斗夹爪一、多轴移动机构二、铲斗夹爪二、x轴导轨和x轴齿条;所述x横梁为两个,两个所述x横梁分别位于加热炉和保温炉之间两侧,两个所述x横梁底部均固定连接有数个立柱,两个所述x横梁顶部均固定连接有x轴导轨,两个所述x横梁内侧面上均固定连接有x轴齿条;所述多轴移动机构一两侧分别活动连接在对应的x轴导轨上面一侧,所述多轴移动机构一两侧分别与对应的x轴齿条相连接,所述多轴移动机构一下侧末端固定连接有铲斗夹爪一;所述旋转变位机为数个,数个所述旋转变位机分别均匀设在两个所述x横梁之间地面上,数个所述旋转变位机侧面均设有焊接机器人;所述多轴移动机构二两侧分别活动连接在对应的x轴导轨上面另一侧,所述多轴移动机构二两侧分别与对应的x轴齿条相连接,所述多轴移动机构二下侧末端固定连接有铲斗夹爪二。
3、作为优选,所述多轴移动机构二与多轴移动机构一的结构一致,所述多轴移动机构一的具体结构包括x轴滑块、y轴横梁、y轴导轨、y轴座、y轴电机、y轴齿条、z轴滑块、z轴臂、z轴导轨、y轴滑块、z轴电机、z轴齿条、x轴电机、多轴齿轮箱和传动轴;所述y轴横梁两侧底部均固定连接有x轴滑块,且x轴滑块分别活动连接在对应的x轴导轨上面,所述y轴横梁上面固定连接有y轴导轨,所述y轴横梁一侧面上固定连接有y轴齿条;所述y轴座一侧面上固定连接有数个y轴滑块,且y轴滑块活动连接在y轴导轨上面,所述y轴座另一侧面两边均固定连接有z轴滑块,所述y轴座另一侧面上固定连接有y轴电机,且y轴电机输出轴上固定连接有y轴齿轮,且y轴齿轮与y轴齿条相连接;所述z轴臂两侧均固定连接有z轴导轨,且z轴导轨分别活动连接在对应的z轴滑块内侧,所述z轴臂下侧末端固定连接有铲斗夹爪一,所述z轴臂内侧面上固定连接有z轴齿条;所述z轴电机固定连接在y轴座一侧面上,所述z轴电机输出轴上固定连接有z轴齿轮,且z轴齿轮与z轴齿条相连接;所述多轴齿轮箱固定连接在y轴横梁另一侧面中央,所述多轴齿轮箱两侧输出轴上均固定连接有传动轴,且传动轴外侧端部均固定连接有x轴齿轮,且x轴齿轮分别与对应的x轴齿条相连接,所述多轴齿轮箱上面固定连接有x轴电机,且x轴电机输出轴与多轴齿轮箱的输入轴相连接。
4、作为优选,所述x轴电机、y轴电机和z轴电机均为伺服电机或步进电机。
5、作为优选,所述铲斗夹爪二与铲斗夹爪一的具体结构一致,且铲斗夹爪一的具体结构包括旋转电机、减速器、安装板、连接座、直线导轨、直线滑块、固定托起夹爪、气缸、活动夹爪、夹持电机、主动带轮、同步带、从动带轮、双头螺杆、套体和导柱;所述减速器上侧中央固定连接有旋转电机,且旋转电机下侧输出轴与减速器上侧输入轴相连接,所述减速器下侧输出轴上固定连接有安装板,且安装板底部固定连接有连接座;所述连接座一侧上面固定连接有夹持电机,且夹持电机输出轴上侧固定连接有主动带轮,所述连接座底面两侧均固定连接有直线导轨;所述双头螺杆活动连接在连接座下侧中央,所述双头螺杆外侧末端固定连接有从动带轮,且从动带轮通过同步带与主动带轮相连接;所述固定托起夹爪为两个,两个所述固定托起夹爪顶部两边均固定连接有直线滑块,且直线滑块分别活动连接在对应的直线导轨两侧,两个所述固定托起夹爪上面一侧均固定连接有气缸,两个所述固定托起夹爪上面另一侧两边内部均固定连接有套体,且套体内部均活动连接有导柱,两个所述固定托起夹爪上侧中央设置的螺纹孔分别与双头螺杆两侧的外螺纹相连接;所述活动夹爪为两个,两个所述活动夹爪上侧两边分别与对应的导柱外侧端部固定连接,两个所述活动夹爪上侧中央分别与对应的气缸活塞杆端部固定连接。
6、作为优选,所述夹持电机为伺服电机或步进电机。
7、作为优选,所述双头螺杆两侧外螺纹的螺纹旋向相反。
8、作为优选,所述减速器为rv减速器。
9、作为优选,所述旋转电机为伺服电机或步进电机。
10、本发明的有益效果:(1)本发明具有结构合理简单、生产成本低、安装方便,这里设置的多轴移动机构一和多轴移动机构二,能够根据需要带动铲斗夹爪一和铲斗夹爪二进行不同工序中抓取铲斗的需要,从而提高了生产的效率。
11、(2)本发明中设置的铲斗夹爪一和铲斗夹爪二,能够通过固定托起夹爪托起铲斗,以及通过活动夹爪夹住铲斗,从而确保了铲斗抓取后搬运的安全性和可靠性。
12、(3)本发明铲斗夹爪一和铲斗夹爪二中设置的夹持电机,能够根据需要调节两个托起夹爪之间的距离,从而满足了不同大小铲斗抓取的需要,也就提高了使用时候的便利性。
技术特征:
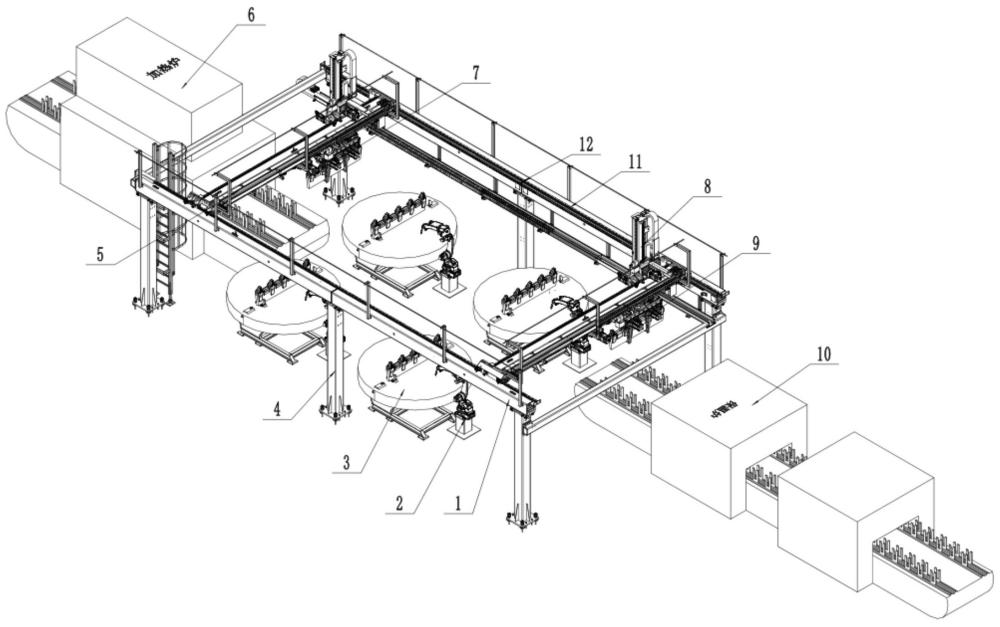
1.一种铲斗上下料桁架机器人,包括加热炉(6)和保温炉(10),其特征在于:还包括x横梁(1)、焊接机器人(2)、旋转变位机(3)、立柱(4)、多轴移动机构一(5)、铲斗夹爪一(7)、多轴移动机构二(8)、铲斗夹爪二(9)、x轴导轨(11)和x轴齿条(12);
2.根据权利要求1所述的铲斗上下料桁架机器人,其特征在于:所述多轴移动机构二(8)与多轴移动机构一(5)的结构一致,所述多轴移动机构一(5)的具体结构包括x轴滑块(51)、y轴横梁(52)、y轴导轨(53)、y轴座(54)、y轴电机(55)、y轴齿条(56)、z轴滑块(57)、z轴臂(58)、z轴导轨(59)、y轴滑块(510)、z轴电机(511)、z轴齿条(512)、x轴电机(513)、多轴齿轮箱(514)和传动轴(515);
3.根据权利要求2所述的铲斗上下料桁架机器人,其特征在于:所述x轴电机(513)、y轴电机(55)和z轴电机(511)均为伺服电机或步进电机。
4.根据权利要求1所述的铲斗上下料桁架机器人,其特征在于:所述铲斗夹爪二(9)与铲斗夹爪一(7)的具体结构一致,且铲斗夹爪一(7)的具体结构包括旋转电机(71)、减速器(72)、安装板(73)、连接座(74)、直线导轨(75)、直线滑块(76)、固定托起夹爪(77)、气缸(78)、活动夹爪(79)、夹持电机(710)、主动带轮(711)、同步带(712)、从动带轮(713)、双头螺杆(714)、套体(715)和导柱(716);
5.根据权利要求4所述的铲斗上下料桁架机器人,其特征在于:所述夹持电机(710)为伺服电机或步进电机。
6.根据权利要求4所述的铲斗上下料桁架机器人,其特征在于:所述双头螺杆(714)两侧外螺纹的螺纹旋向相反。
7.根据权利要求4所述的铲斗上下料桁架机器人,其特征在于:所述减速器(72)为rv减速器。
8.根据权利要求4所述的铲斗上下料桁架机器人,其特征在于:所述旋转电机(71)为伺服电机或步进电机。
技术总结
本发明公开了一种铲斗上下料桁架机器人,包括加热炉和保温炉,还包括X横梁、焊接机器人、旋转变位机、立柱、多轴移动机构一、铲斗夹爪一、多轴移动机构二、铲斗夹爪二、X轴导轨和X轴齿条;本发明中设置的多轴移动机构一和多轴移动机构二,能够根据需要带动铲斗夹爪一和铲斗夹爪二进行不同工序中抓取铲斗的需要,从而提高了生产的效率;本发明中设置的铲斗夹爪一和铲斗夹爪二,能够通过固定托起夹爪托起铲斗,以及通过活动夹爪夹住铲斗,从而确保了铲斗抓取后搬运的安全性和可靠性;本发明铲斗夹爪一和铲斗夹爪二中设置的夹持电机,能够根据需要调节两个托起夹爪之间的距离,从而满足了不同大小铲斗抓取的需要,也就提高了使用时候的便利性。
技术研发人员:计圣勇
受保护的技术使用者:上海博信业辉系统工程有限公司
技术研发日:
技术公布日:2024/12/10
- 还没有人留言评论。精彩留言会获得点赞!