激光测距光学组件及激光加工系统的制作方法
本发明属于激光加工领域,涉及一种激光测距光学组件及激光加工系统。
背景技术:
1、目前,随着激光技术的不断发展,激光的多种特性被应用于了诸多领域,其中,激光技术在测距领域中发展的十分迅速。目前,大部分工程都在使用激光测距仪进行测距,这正是因为激光测距仪较高的准确度和较高的时效性给人们带来了极大的便利。激光加工中,时常需要精确的测量激光工件与焦点的准确位置,从而保证能在工件中进行精准的加工。为了更好的保护工件,越来越多的激光加工前,会将工件进行涂层处理,涂层处理完成后开始进行激光加工。由于涂层的材料种类及涂覆程度会导致表面粗糙度及激光的散射,故容易造成测量不准的情况。
2、如申请号为201810165427.5的发明申请中,公开了一种基于激光三角位移测量方法的厚度测量装置,通过双激光三角位移测量厚度,它通过两个不同波段的半导体激光器发出的激光分别照射到物体的两侧表面,通过光电非接触精确测量处于运动或振动状态中的物体厚度。但是该专利测量系统因采用了上下两个激光位移传感器而使得组成复杂、成本高、装置结体积大,而且激光垂直入射后大部分能量被反射或者投射、成像波形幅值将很低、测量精度差,同时对于不同距离导致的厚度测量问题仍然没有克服,并不可取。同时,公开号是cn113210360a的发明申请中,公开了一种清洗的设备,该方案主要是针对常规能进行测量的金属等,并不能实现带涂层材料的测量精准度提高。公开号是cn111360396a的发明申请中,主要是采用了光纤来回收光路中的信号来测量。由于涂层表面粗糙度及颗粒度不一致,该方案同样不能解决实现带涂层材料的测量精准度。公开号是cn104748721a的发明申请中,由于视觉相机本身存在景深误差,对高精度测量都没有办法达到测量效果。显然,现有技术中,受材料表面涂层的厚度以及粗糙度的影响,无法高精度的测量带不同涂层的材料的加工距离。
技术实现思路
1、为了解决背景技术中存在的上述技术问题,本发明提供了一种测量准确性好以及测量精度高的激光测距光学组件及激光加工系统。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种激光测距光学组件,其特征在于:所述激光测距光学组件包括同轴测距仪以及与同轴测距仪处于同一光路上的光束平移模组。
4、上述光束平移模组包括电机以及玻璃片;所述玻璃片与同轴测距仪处于同一光路;所述电机与玻璃片相连并带动玻璃片在两个轴上倾斜。
5、上述电机包括第一电机以及第二电机;所述第一电机以及第二电机分别与玻璃片相连;所述第一电机驱动玻璃片在y轴上倾斜;所述第二电机驱动玻璃片在z轴上倾斜。
6、上述第一电机驱动玻璃片在y轴上倾斜的角度是±30°;所述第二电机驱动玻璃片在z轴上倾斜的角度是±30°。
7、一种基于如前所述的激光测距光学组件的测距方法,其特征在于:所述测距方法包括以下步骤:
8、1)同轴测距仪出射测距激光,测距激光经过玻璃片透射后入射至待测物体表面a点,得到待测物体表面a点的测距数据la;保持同轴测距仪的位置不动,通过电机调整玻璃片在z轴上的倾角,促使经过玻璃片透射后的测距激光从待测物体表面a点开始平移,并入射至待测物体表面b点,得到待测物体表面b点的测距数据lb;所述待测物体表面b点与待测物体表面a点相邻;
9、2)通过电机调整玻璃片在y轴上的倾角,促使经过玻璃片透射后的测距激光从待测物体表面b点开始平移,并入射至待测物体表面c点,得到待测物体表面c点的测距数据lc;所述待测物体表面c点分别与待测物体表面b点以及待测物体表面d点相邻;
10、3)通过电机调整玻璃片在z轴上的倾角,促使经过玻璃片透射后的测距激光从待测物体表面a点开始平移,并入射至待测物体表面d点,得到待测物体表面d点的测距数据ld;所述待测物体表面d点与待测物体表面a点相邻;
11、4)根据la、lb、lc以及ld的关系确定最终的测距数据。
12、上述步骤4)的具体实现方式是:
13、当测距数据la、测距数据lb、测距数据lc以及测距数据ld中存在任一个测距数据与其他三个测距数据偏差较大时,剔除偏差较大的测距数据后,取剩余三个测距数据的平均值作为最终的测距数据;所述偏差由测距仪得到的,偏差的产生是由于涂层的不均匀造成的;
14、优选地,当测距数据la、测距数据lb、测距数据lc以及测距数据ld中存在任一相邻两个测距数据与剩余两个测距数据偏差较大时,则保留剩余两个测距数据后,重复步骤1)、步骤2)或步骤3),得到待测物体表面e点的测距数据le和待测物体表面f点的测距数据lf;根据la、lb、lc、ld、le以及lf的关系确定最终的测距数据。
15、一种激光加工系统,其特征在于:所述激光加工系统包括激光成形组件、带涂层工件、合束镜以及如前所述的激光测距光学组件;所述激光成形组件向带涂层工件出射成形激光;所述激光测距光学组件向带涂层工件出射测距激光;所述成形激光以及测距激光经合束镜同轴。
16、上述激光成形组件包括激光器以及加工头;所述激光器出射成形激光;所述合束镜以及加工头自前而后依次设置在成形激光所在光路上;所述成形激光经加工头后入射至带涂层工件;所述测距激光经合束镜以及加工头后入射至带涂层工件。
17、上述激光成形组件还包括反射镜;所述合束镜、反射镜以及加工头自前而后依次设置在成形激光所在光路上。
18、一种基于如前所述的激光加工系统的带涂层工件的激光加工方法,其特征在于:所述方法包括以下步骤:
19、1)组装如前所述的激光加工系统;
20、2)开启如前所述的激光测距光学组件,激光测距光学组件向带涂层工件出射测距激光;
21、3)通过测距激光确定带涂层工件的加工距离;
22、4)关闭如前所述的激光测距光学组件,开启激光成形组件,激光成形组件向带涂层工件出射成形激光;
23、5)成形激光以步骤3)得到的加工距离对带涂层工件进行激光加工。
24、本发明的优点是:
25、本发明提供了一种激光测距光学组件及激光加工系统,其中,该激光测距光学组件包括同轴测距仪以及与同轴测距仪处于同一光路上的光束平移模组。本发明是基于fmcw的同轴测距的光束平移测量方案,该方案可以置入激光加工光路,也可以单独外置进行测量。判断采用四点法进行测试,根据测试的四点的数据来判断测量结果的准确性及一致性。通过对涂层附近相邻的点的高精度的测试,采用四点法测试,从而避免了测量的精度的不准确。本发明使用激光同轴测距的方案,即发射光和收集光是相同的光学光路,而非三角测距的方案。基于调频连续波(fmcw)的相干接收原理。可以集成到激光加工光路或者单独外置旁轴中。该方案不会受到共轴光路中器件的镜片添加及反射镜等的影响,可实现测距的效果,尤其可实现高精度测量带涂层的材料的加工距离的测量。
技术特征:
1.一种激光测距光学组件,其特征在于:所述激光测距光学组件包括同轴测距仪(1)以及与同轴测距仪(1)处于同一光路上的光束平移模组(2)。
2.根据权利要求1所述的激光测距光学组件,其特征在于:所述光束平移模组(2)包括电机(3)以及玻璃片;所述玻璃片与同轴测距仪(1)处于同一光路;所述电机(3)与玻璃片相连并带动玻璃片在两个轴上倾斜。
3.根据权利要求2所述的激光测距光学组件,其特征在于:所述电机(3)包括第一电机以及第二电机;所述第一电机以及第二电机分别与玻璃片相连;所述第一电机驱动玻璃片在y轴上倾斜;所述第二电机驱动玻璃片在z轴上倾斜。
4.根据权利要求3所述激光测距光学组件,其特征在于:所述第一电机驱动玻璃片在y轴上倾斜的角度是±30°;所述第二电机驱动玻璃片在z轴上倾斜的角度是±30°。
5.一种基于如权利要求1或2或3或4所述的激光测距光学组件的测距方法,其特征在于:所述测距方法包括以下步骤:
6.根据权利要求5所述的测距方法,其特征在于:所述步骤4)的具体实现方式是:
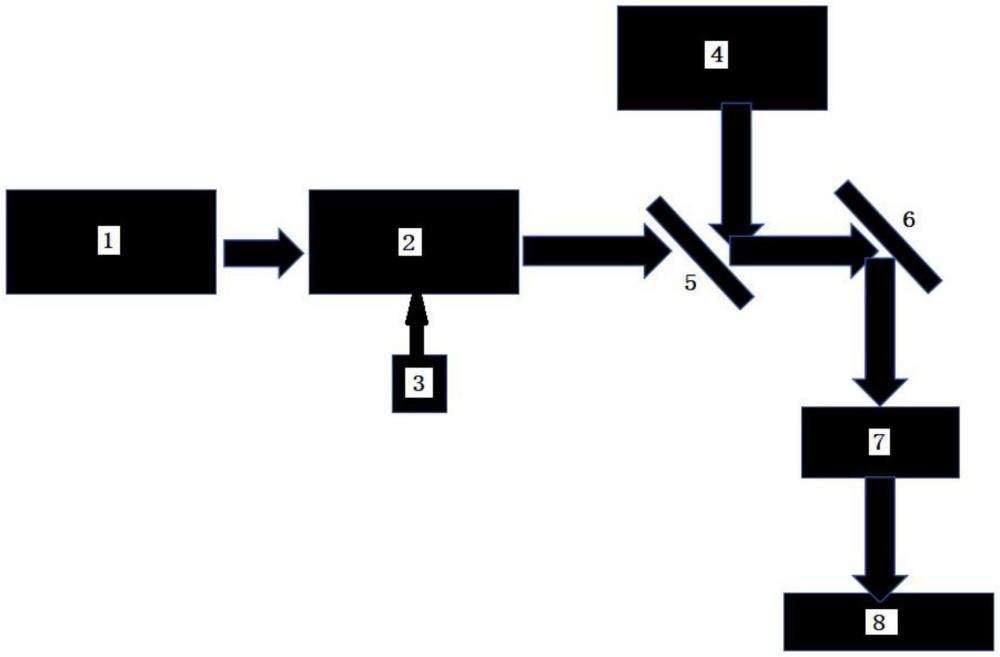
7.一种激光加工系统,其特征在于:所述激光加工系统包括激光成形组件、带涂层工件(8)、合束镜(5)以及如权利要求1-4任一项所述的激光测距光学组件;所述激光成形组件向带涂层工件(8)出射成形激光;所述激光测距光学组件向带涂层工件(8)出射测距激光;所述成形激光以及测距激光经合束镜(5)同轴。
8.根据权利要求7所述的激光加工系统,其特征在于:所述激光成形组件包括激光器(4)以及加工头(7);所述激光器(4)出射成形激光;所述合束镜(5)以及加工头(7)自前而后依次设置在成形激光所在光路上;所述成形激光经加工头(7)后入射至带涂层工件(8);所述测距激光经合束镜(5)以及加工头(7)后入射至带涂层工件(8)。
9.根据权利要求8所述的激光加工系统,其特征在于:所述激光成形组件还包括反射镜(6);所述合束镜(5)、反射镜(6)以及加工头(7)自前而后依次设置在成形激光所在光路上。
10.一种基于如权利要求7或8或9所述的激光加工系统的带涂层工件的激光加工方法,其特征在于:所述方法包括以下步骤:
技术总结
本发明属于激光加工领域,涉及一种激光测距光学组件及激光加工系统,该激光测距光学组件包括同轴测距仪以及与同轴测距仪处于同一光路上的光束平移模组。本发明提供了一种测量准确性好以及测量精度高的激光测距光学组件及激光加工系统。
技术研发人员:林喜泓,王自,段艺华
受保护的技术使用者:西安中科微精光子科技股份有限公司
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!