一种基于工业机器人搬运组装设备的制作方法
本技术涉及自动化生产,具体为一种基于工业机器人搬运组装设备。
背景技术:
1、工业机器人是一种通常应用于工业生产领域的自动化机器人。它们被设计用来执行重复性、繁琐或危险的任务,以提高生产效率、质量和安全性,工业机器人通常由机械结构、电子控制系统和编程软件组成,它们可以具有多个关节和自由度,以模仿人类的动作和灵活性。传感器和视觉系统的应用使得工业机器人能够感知和适应环境变化,并与周围设备和人类工作人员进行交互。
2、目前在使用工业机器人对产品进行组装后,通常由人工对成品进行收装搬运,不仅自动化程度低,增加劳动力,且人工搬运成品时容易发生操作失误,比如产品掉落或碰撞,导致产品损坏和浪费。
技术实现思路
1、本实用新型目的在于提供一种能够在产品组装后,自动完成收装,无需人工参与的基于工业机器人搬运组装设备。
2、为实现上述目的,本实用新型的技术方案如下。
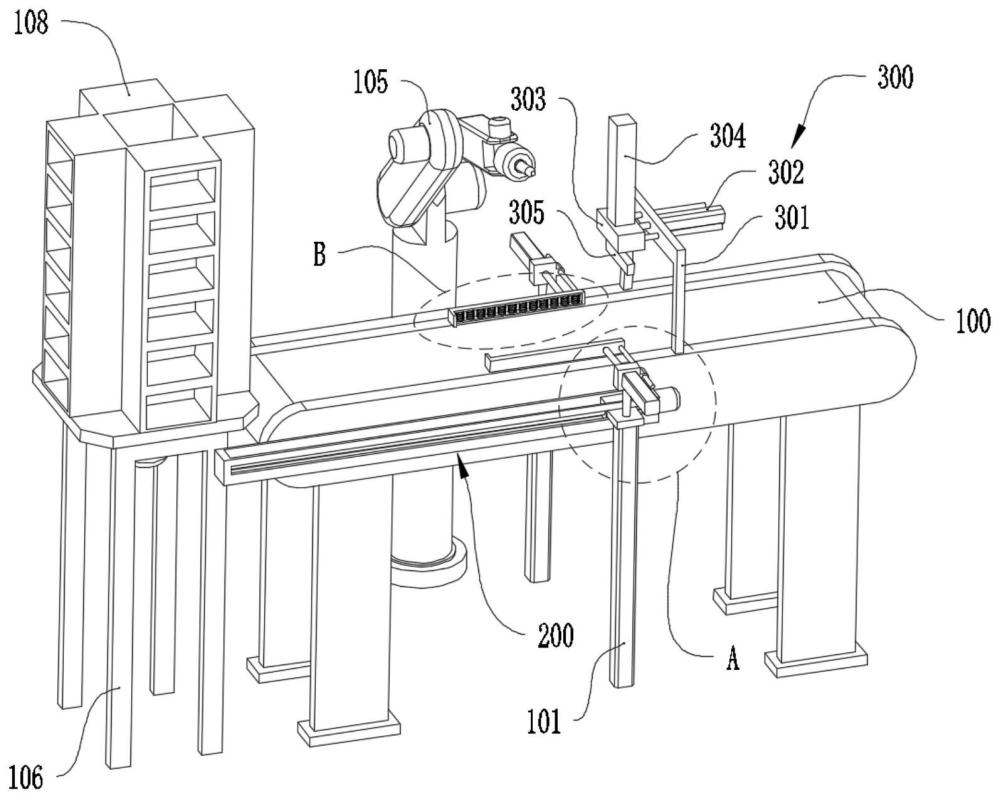
3、一种基于工业机器人搬运组装设备,包括输送装置和工业机器人,输送装置长度方向的两侧均通过平移机构安装有第一电动推杆,平移机构能够带动第一电动推杆沿着输送装置的长度方向水平移动,输送装置的外侧设置有工业机器人。第一电动推杆伸缩端的端部安装有第一安装块,第一安装块的外表面安装有第二电动推杆,且第二电动推杆的伸缩端贯穿至第一安装块的另一侧,第二电动推杆伸缩端的端部安装有夹板,输送装置的上侧设置有能够对产品进行定位的定位机构。输送装置的末端设置有支架,支架的顶部设置有底板,底板的上表面安装有收纳柜。
4、由此可见,产品在输送装置上输送至指定位置后,通过位于两侧的第二电动推杆带动夹板移动,实现对产品固定的目的,避免组装过程中产品发生移位,并且通过定位机构的设置,可对产品进行定位,提高产品的位置精度,进而提高产品的组装质量以及效率,产品组装好后,由平移机构带动产品往收纳柜的方向移动,且同时第一电动推杆将产品顶起至合适高度,最后将组装好的产品搬运至收纳柜内,从而实现自动收装的目的,自动化程度高,减轻劳动力,且避免因人工操作失误,导致产品损坏和浪费的情况。
5、进一步的,平移机构包括安装在输送装置外表面的壳体,壳体的内部转动连接有螺纹杆,螺纹杆的外表面安装有螺母座,壳体的侧表面沿其长度方向开设有槽口,螺母座的外表面安装有连接板,且连接板穿过槽口延伸至壳体的外侧并与第一电动推杆连接,壳体的外表面安装第一电机,第一电机的输出轴与螺纹杆连接。
6、通过启动第一电机带动螺纹杆旋转,进而可带动螺母座沿着其表面移动,并通过连接板的连接作用,实现带动第一电动推杆水平移动的目的,故而能够将组装好的产品配合第一电动推杆搬运至收纳柜内进行收装。
7、进一步的,定位机构包括安装在输送装置上表面的u型架,u型架上侧的外表面安装有第三电动推杆,第三电动推杆伸缩端的端部贯穿至u型架的另一侧并安装有第二安装块,第二安装块的上表面安装有第四电动推杆,第四电动推杆伸缩端的端部贯穿至第二安装块的另一侧并安装有推板,两个夹板的外表面靠近收纳柜的一侧安装有限位板,两个夹板的相对面均转动安装有多个滚轮。
8、当两个夹板将产品固定后,启动第四电动推杆带动推板下降至产品的侧边,随后第三电动推杆启动带动推板往产品的方向移动并对其推动,由于滚轮能够转动,故而可将推板可推动产品往限位板的方向移动并与其抵接,从而实现对产品精确定位的目的。
9、进一步的,支架的顶部安装有第二电机,支架的上表面转动安装有圆盘,且第二电机的输出轴与圆盘的圆心连接,并且底板设置在第二电机的上表面。收纳柜设置有四组,且四组收纳柜圆周阵列分布。
10、当其中一组收纳柜装满产品后,可启动第二电机带动圆盘旋转,进而带动底板旋转,使得装满产品的收纳柜旋转至另一侧,而其他方向的收纳柜旋转至正对输送装置的方向,可继续对产品进行收纳,从而提高了产品的收纳能力。
11、进一步的,圆盘的上表面开设有多个凹槽,底板的底部安装有多个凸杆,且凸杆与凹槽相匹配。
12、当四个收纳柜全部装满产品后,工人可将底板连带着其上侧的收纳柜取下并放入仓库,随后重新安装收纳柜即可。
13、进一步的,滚轮的外表面设置有橡胶套,橡胶套的外表面设置有防滑纹。
14、通过橡胶套和防滑纹的设置,可增大滚轮与产品之间的摩擦力,故而提高对产品的固定效果,使产品搬运过程中保持稳定。
15、进一步的,夹板的外表面连接有导向杆,导向杆的端部贯穿至第一安装块的另一侧。
16、通过导向杆的设置,可提高夹板结构的稳定性。
技术特征:
1.一种基于工业机器人搬运组装设备,包括输送装置(100)和工业机器人(105),其特征在于:
2.根据权利要求1所述的一种基于工业机器人搬运组装设备,其特征在于:
3.根据权利要求2所述的一种基于工业机器人搬运组装设备,其特征在于:
4.根据权利要求3所述的一种基于工业机器人搬运组装设备,其特征在于:
5.根据权利要求4所述的一种基于工业机器人搬运组装设备,其特征在于:
6.根据权利要求5所述的一种基于工业机器人搬运组装设备,其特征在于:
7.根据权利要求1所述的一种基于工业机器人搬运组装设备,其特征在于:
技术总结
本技术涉及一种基于工业机器人搬运组装设备,其包括输送装置和工业机器人,输送装置长度方向的两侧均通过平移机构安装有第一电动推杆,平移机构能够带动第一电动推杆沿着输送装置的长度方向水平移动,输送装置的外侧设置有工业机器人;第一电动推杆伸缩端的端部安装有第一安装块,第一安装块的外表面安装有第二电动推杆,且第二电动推杆的伸缩端贯穿至第一安装块的另一侧。产品组装好后,由平移机构带动产品往收纳柜的方向移动,且同时第一电动推杆将产品顶起至合适高度,最后将组装好的产品搬运至收纳柜内,从而实现自动收装的目的,自动化程度高,减轻劳动力,且避免因人工操作失误,导致产品损坏和浪费的情况。
技术研发人员:李清宇,梅林刚,明利
受保护的技术使用者:恒亦达智能设备(苏州)有限公司
技术研发日:20240122
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!