一种焊接机器人易于更换的焊接头的制作方法
本技术涉及焊接机器人,具体为一种焊接机器人易于更换的焊接头。
背景技术:
1、众所周知,现有的机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作,故此我们需要用到焊接机器人。
2、现有的焊接机器人焊接头在使用时,结构固定不易拆卸,在更换维修时十分不便,从而提高了工作人员更换焊接头的时间,降低了工作人员的工作效率,同时也降低了该装置的生产效率,导致其使用局限性较高,为此提出了一种焊接机器人易于更换的焊接头。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种焊接机器人易于更换的焊接头。
3、(二)技术方案
4、为实现上述目的,本实用新型提供如下技术方案:一种焊接机器人易于更换的焊接头,包括机械臂和移动头,所述移动头在所述机械臂上端,所述移动头下侧壁前端设置有凹槽,所述凹槽内设置有连接块,所述连接块内设置有空腔,所述空腔内设置有固定装置,所述固定装置包括固定块、弹簧和限位板,所述限位板在所述空腔中心处,所述弹簧对称布置在所述限位板两侧壁,所述固定块与所述弹簧远离所述限位板一端连接,所述固定块贯穿所述空腔两侧壁并与其滑动连接,所述凹槽内侧壁设置有对称的固定槽,所述固定块贯穿所述固定槽并与其滑动连接,所述连接块底壁设置有通孔,所述通孔与所述空腔贯通,所述固定块靠近所述弹簧一端侧壁设置有手持杆,所述手持杆贯穿所述通孔并与其滑动连接,所述手持杆上设置有阻尼轴,所述阻尼轴两端设置有接触杆,所述接触杆与所述手持杆通过阻尼轴连接,所述连接块底壁两端设置有支撑杆,所述支撑杆下端设置有焊接用头。
5、为了对固定块进行进一步限位,本实用新型改进有:所述接触杆上设置有限位杆,所述限位杆贯穿所述接触杆与所述连接块下侧壁两端。
6、为了对弹簧进行限位,本实用新型改进有:所述弹簧内设置有伸缩杆,所述伸缩杆贯穿所述弹簧,所述伸缩杆一端与所述固定块连接,所述伸缩杆另一端与所述限位板连接。
7、为了方便支撑固定该装置,本实用新型改进有:所述机械臂底壁设置有支撑板,所述支撑板四角设置有固定螺钉,所述固定螺钉贯穿所述支撑板。
8、为了方便手持固定限位杆,本实用新型改进有:所述限位杆一端设置有手持块。
9、为了方便夜间进行使用操作,本实用新型改进有:所述移动头底壁设置有照明灯,所述照明灯在所述凹槽底壁。
10、为了方便拿持固定螺钉,本实用新型改进有:所述固定螺钉上端设置有固定按钮。
11、为了增大摩擦力,防止移动固定块时打滑,本实用新型改进有:所述手持杆上设置有防滑纹。
12、(三)有益效果
13、与现有技术相比,本实用新型提供了一种焊接机器人易于更换的焊接头,具备以下有益效果:
14、该焊接机器人易于更换的焊接头,设置有固定块和弹簧,弹簧收缩伸展带动固定块进行移动,可以将固定块贯穿固定槽或脱离固定槽,使固定块带动连接块进行移动,从而带动焊接用头进行移动,方便将焊接用头进行安装拆卸,方便进行使用维修,减少安装时间,提高工作效率,设置有限位杆和接触杆,将接触杆与手持杆进行转动,可以将接触杆与连接块重叠,用限位杆贯穿进行限位,方便进行固定,防止固定块乱动,进一步进行限位,设置有伸缩杆,方便对弹簧进行支撑,防止其掉落。
技术特征:
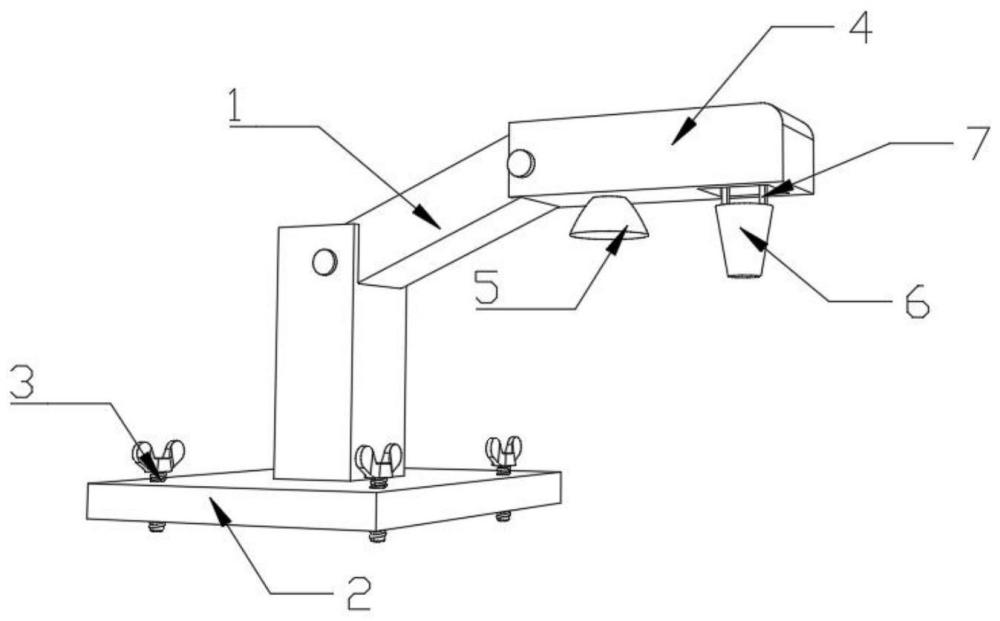
1.一种焊接机器人易于更换的焊接头,包括机械臂(1)和移动头(4),其特征在于:所述移动头(4)在所述机械臂(1)上端,所述移动头(4)下侧壁前端设置有凹槽,所述凹槽内设置有连接块(8),所述连接块(8)内设置有空腔,所述空腔内设置有固定装置,所述固定装置包括固定块(10)、弹簧(12)和限位板(11),所述限位板(11)在所述空腔中心处,所述弹簧(12)对称布置在所述限位板(11)两侧壁,所述固定块(10)与所述弹簧(12)远离所述限位板(11)一端连接,所述固定块(10)贯穿所述空腔两侧壁并与其滑动连接,所述凹槽内侧壁设置有对称的固定槽(9),所述固定块(10)贯穿所述固定槽(9)并与其滑动连接,所述连接块(8)底壁设置有通孔,所述通孔与所述空腔贯通,所述固定块(10)靠近所述弹簧(12)一端侧壁设置有手持杆(14),所述手持杆(14)贯穿所述通孔并与其滑动连接,所述手持杆(14)上设置有阻尼轴,所述阻尼轴两端设置有接触杆(15),所述接触杆(15)与所述手持杆(14)通过阻尼轴连接,所述连接块(8)底壁两端设置有支撑杆(7),所述支撑杆(7)下端设置有焊接用头(6)。
2.根据权利要求1所述的一种焊接机器人易于更换的焊接头,其特征在于:所述接触杆(15)上设置有限位杆(16),所述限位杆(16)贯穿所述接触杆(15)与所述连接块(8)下侧壁两端。
3.根据权利要求2所述的一种焊接机器人易于更换的焊接头,其特征在于:所述弹簧(12)内设置有伸缩杆(13),所述伸缩杆(13)贯穿所述弹簧(12),所述伸缩杆(13)一端与所述固定块(10)连接,所述伸缩杆(13)另一端与所述限位板(11)连接。
4.根据权利要求3所述的一种焊接机器人易于更换的焊接头,其特征在于:所述机械臂(1)底壁设置有支撑板(2),所述支撑板(2)四角设置有固定螺钉(3),所述固定螺钉(3)贯穿所述支撑板(2)。
5.根据权利要求4所述的一种焊接机器人易于更换的焊接头,其特征在于:所述限位杆(16)一端设置有手持块(17)。
6.根据权利要求5所述的一种焊接机器人易于更换的焊接头,其特征在于:所述移动头(4)底壁设置有照明灯(5),所述照明灯(5)在所述凹槽底壁。
7.根据权利要求6所述的一种焊接机器人易于更换的焊接头,其特征在于:所述固定螺钉(3)上端设置有固定按钮。
8.根据权利要求7所述的一种焊接机器人易于更换的焊接头,其特征在于:所述手持杆(14)上设置有防滑纹。
技术总结
本技术涉及焊接机器人技术领域,具体为一种焊接机器人易于更换的焊接头,包括机械臂和移动头,所述移动头下侧壁前端设置有凹槽,所述凹槽内设置有连接块,所述连接块内设置有空腔,所述空腔内设置有固定装置,所述固定装置包括固定块、弹簧和限位板,所述凹槽内侧壁设置有对称的固定槽,所述连接块底壁设置有通孔,所述固定块靠近所述弹簧一端侧壁设置有手持杆,所述手持杆上设置有阻尼轴,所述阻尼轴两端设置有接触杆,所述连接块底壁两端设置有支撑杆,所述支撑杆下端设置有焊接用头,方便将焊接用头进行安装拆卸,方便进行使用维修,减少安装时间,提高工作效率,防止固定块乱动,进一步进行限位。
技术研发人员:杜恒明
受保护的技术使用者:天津兰瑞昇科技有限公司
技术研发日:20240201
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!