一种便于固定装置的六轴机器人的制作方法
本技术涉及六轴机器人,特别涉及一种便于固定装置的六轴机器人。
背景技术:
1、六轴机器人通常采用电动伺服驱动系统来控制每个关节的运动。每个关节都由电机、减速器和传感器组成,通过接收控制信号来实现精确的运动和位置控制。通过合理布置关节和传感器,六轴机器人可以实现复杂的轨迹规划和运动控制,具备较高的灵活性和精度,是一种功能强大且灵活多样的机器人系统,可以在各种工业应用中提高生产效率、降低人工劳动强度,并具备较高的操作精度和可靠性。
2、在公告号为cn 209125115 u的专利中公开了六轴焊接机器人,所述六轴焊接机器人本体包括底座,所述底座包括第一底座和第二底座,所述第二底座的底部的边缘周向设有若干安装板,所述第二底座套接在所述第一底座外,所述传动机构能够驱动所述第一底座相对于所述第二底座上下运动来调节所述底座的高度。本实用新型包括能够调节高度的底座,使得六轴焊接机器人的应用范围更广。
3、上述技术中存在虽然可以调节不同高度焊接,但是在焊接过程中,往往需要额外的夹持结构对焊接件进行固定,从而导致增加成本和制造时间,影响焊接效率,因此具有一定的局限性,故在此技术上进行创新。
技术实现思路
1、本实用新型的目的在于提供一种便于固定装置的六轴机器人,以解决上述背景技术中提出的问题。
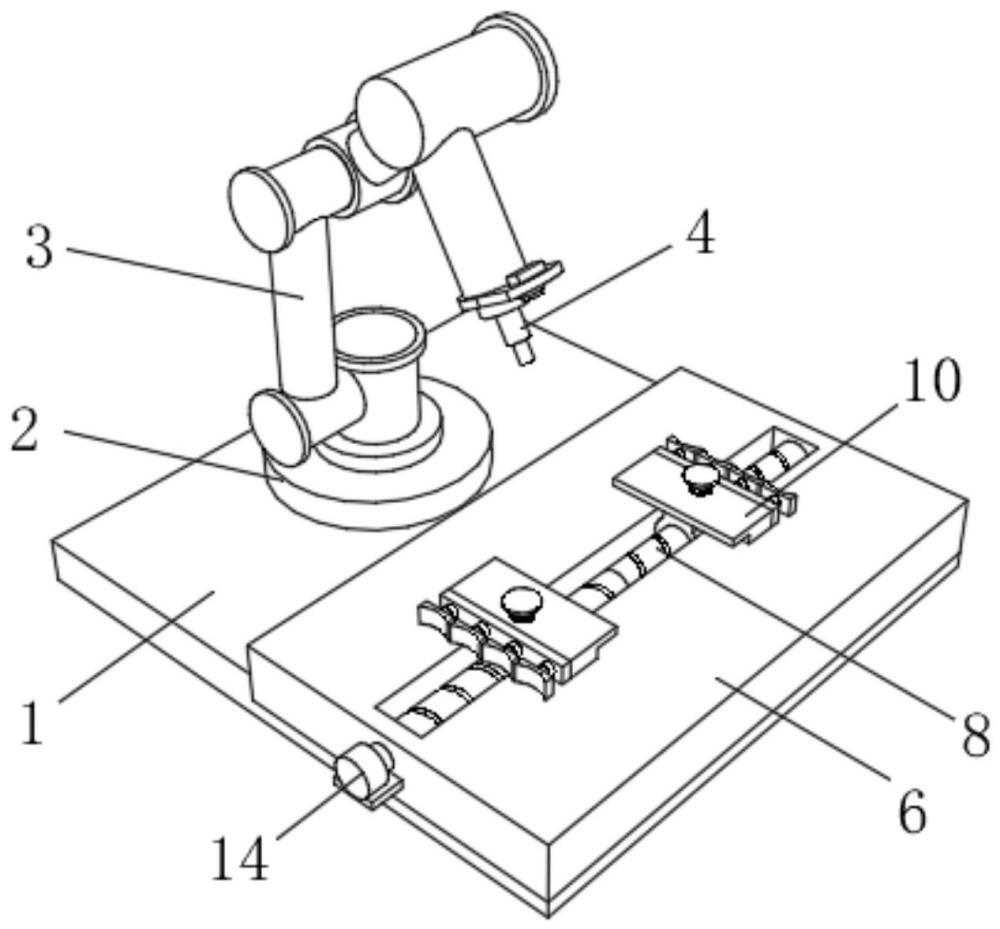
2、为实现上述目的,本实用新型提供如下技术方案:一种便于固定装置的六轴机器人,包括操作台,所述操作台顶端背面的中部固定安装有底座,所述底座上安装有六轴机器人本体,所述六轴机器人本体的一端安装有焊接头,所述焊接头的一侧设有距离传感器,所述操作台顶端的正面固定安装有焊接台,所述焊接台的顶端对称设有两个夹具。
3、作为本实用新型的一种优选技术方案,所述焊接台的顶端开设有调节槽,所述调节槽的内部设有双向丝杆,所述双向丝杆的外壁螺纹连接有两个螺纹套,两个所述螺纹套的顶端均通过设置的紧固栓与相邻夹具底端的中部螺纹连接。
4、作为本实用新型的一种优选技术方案,两个所述螺纹套的外壁均与双向丝杆的内壁滑动连接,两个所述螺纹套对称设置在双向丝杆上。
5、作为本实用新型的一种优选技术方案,所述焊接台一侧的中部固定安装有电机,所述电机的输出端贯穿调节槽且与双向丝杆的一端固定连接,所述双向丝杆的另外一端与调节槽内壁的另外一侧转动连接。
6、作为本实用新型的一种优选技术方案,两个所述夹具不相邻的一侧均固定安装有多个弹簧套筒,多个所述弹簧套筒的一端均固定连接有挤压垫。
7、作为本实用新型的一种优选技术方案,所述六轴机器人本体上安装有控制器,距离传感器的信号输出端与控制器的信号输入端电性连接,所述控制器的信号输出端与电机的信号输入端电性连接。
8、与现有技术相比,本实用新型的有益效果是:
9、本实用新型通过焊接头靠近焊接件时,达到设置的阈值时,驱动电机运行带动双向丝杆旋转,从而带动两个螺纹套相互靠近,使得夹具对焊接件进行夹持固定,因此便于在焊接时对焊接件进行固定,并且无需额外限位,提高了装置的灵活性与稳定性,从而减少了生产线的停机时间,进一步提高了生产效率。
技术特征:
1.一种便于固定装置的六轴机器人,包括操作台(1),其特征在于:所述操作台(1)顶端背面的中部固定安装有底座(2),所述底座(2)上安装有六轴机器人本体(3),所述六轴机器人本体(3)的一端安装有焊接头(4),所述焊接头(4)的一侧设有距离传感器(5),所述操作台(1)顶端的正面固定安装有焊接台(6),所述焊接台(6)的顶端对称设有两个夹具(10)。
2.根据权利要求1所述的一种便于固定装置的六轴机器人,其特征在于:所述焊接台(6)的顶端开设有调节槽(7),所述调节槽(7)的内部设有双向丝杆(8),所述双向丝杆(8)的外壁螺纹连接有两个螺纹套(9),两个所述螺纹套(9)的顶端均通过设置的紧固栓(13)与相邻夹具(10)底端的中部螺纹连接。
3.根据权利要求2所述的一种便于固定装置的六轴机器人,其特征在于:两个所述螺纹套(9)的外壁均与双向丝杆(8)的内壁滑动连接,两个所述螺纹套(9)对称设置在双向丝杆(8)上。
4.根据权利要求3所述的一种便于固定装置的六轴机器人,其特征在于:所述焊接台(6)一侧的中部固定安装有电机(14),所述电机(14)的输出端贯穿调节槽(7)且与双向丝杆(8)的一端固定连接,所述双向丝杆(8)的另外一端与调节槽(7)内壁的另外一侧转动连接。
5.根据权利要求1所述的一种便于固定装置的六轴机器人,其特征在于:两个所述夹具(10)不相邻的一侧均固定安装有多个弹簧套筒(11),多个所述弹簧套筒(11)的一端均固定连接有挤压垫(12)。
6.根据权利要求4所述的一种便于固定装置的六轴机器人,其特征在于:所述六轴机器人本体(3)上安装有控制器,所述距离传感器(5)的信号输出端与控制器的信号输入端电性连接,所述控制器的信号输出端与电机(14)的信号输入端电性连接。
技术总结
本技术涉及六轴机器人技术领域,公开了一种便于固定装置的六轴机器人,包括操作台,操作台顶端背面的中部固定安装有底座,底座上安装有六轴机器人本体,六轴机器人本体的一端安装有焊接头,焊接头的一侧设有距离传感器,操作台顶端的正面固定安装有焊接台,焊接台的顶端对称设有两个夹具,本技术通过焊接头靠近焊接件时,达到设置的阈值时,驱动电机运行带动双向丝杆旋转,从而带动两个螺纹套相互靠近,使得夹具对焊接件进行夹持固定,因此便于在焊接时对焊接件进行固定,并且无需额外限位,提高了装置的灵活性与稳定性,从而减少了生产线的停机时间,进一步提高了生产效率。
技术研发人员:席青丽,常文锋,李世锋,席彩通,任存勇,常益锋
受保护的技术使用者:宁夏金川交联线缆科技有限公司
技术研发日:20240228
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!