一种用于焊接机器人示教的手柄的制作方法
本申请涉及焊接机器人示教,具体涉及一种用于带有空间定位功能的焊接机器人示教的手柄。
背景技术:
1、在带有空间定位功能的焊接机器人技术中,通常会采用空间定位系统获得操作人员示教的焊缝位置信息和姿态信息,焊接机器人再根据该位置信息和姿态信息去进行焊缝跟踪,从而获得更为精准的焊缝位置信息,之后再执行焊接操作。
2、焊接机器人在进行焊缝跟踪时,焊缝跟踪器发出的线激光不仅需要与焊缝保持垂直状态,并且在焊接方向(焊缝跟踪方向)上,线激光需要在焊枪的前方,而焊缝跟踪器通常又固定在焊枪上,因此焊接机器人中的焊枪需要保持正确的姿态,才能完成焊缝跟踪。该空间定位系统包括无线手柄或示教笔,在示教时,操作人员手握无线手柄或示教笔点击焊缝的两端或者划过焊缝,该空间定位系统就会获取示教过程中无线手柄或示教笔的姿态和位置信息,然后在焊缝跟踪时焊枪会复现该姿态,并根据该姿态去进行焊缝跟踪,故操作人员在示教的时候,也需让无线手柄或示教笔处于正确的姿态。但是现有技术中的无线手柄或示教笔的末端通常呈圆锥状,其整体的形状呈直线状,并没有考虑到焊枪本身的特殊形状,例如在申请号为202122874754 .8的专利说明书附图1至4中,可以很明显的看到,其示教笔整体呈直线状,其笔尖呈圆锥状,这样就会出现以下问题:当操作人员沿着示教笔自身的轴线转动示教笔时,由于其整体形状是轴对称的,因此无法用肉眼很直观地观察到示教的姿态变化,如本申请说明书附图的图9所示,当示教笔沿着其自身的轴线转动时,用肉眼看上去其姿态都差不多,看不出有什么变化,但是如果焊枪复现其姿态,可以较为明显的发现,实际上其姿态变化了很多,既有可能变成了本申请说明书附图的图6、图7中所展示的焊枪姿态,也有可能变成了本申请说明书附图的图8中所展示的焊枪姿态,这种情况下示教笔的姿态是无法与焊枪的姿态相对应起来的,操作人员也就无法很直观且较为准确地观察出示教笔的姿态变化,进而无法预判出焊枪完整的姿态,这时如果操作人员示教时的姿态是错误的,他也无法立即发现和调整,如此会不便于操作人员去完成示教工作。
技术实现思路
1、针对上述问题,本申请的目的在于提供一种用于焊接机器人示教的手柄,以解决现有技术中存在的无法通过肉眼观察手柄的姿态去很直观且较为准确地判断焊枪姿态从而导致示教不便的问题。
2、为了实现上述目的,本申请采用了如下的技术方案:一种用于焊接机器人示教的手柄,所述手柄包括柄身和柄尾,所述柄尾呈弯曲状,所述柄身用于操作人员握持,所述柄尾用于操作人员在示教时接触或者靠近待焊接工件上的焊缝。
3、进一步地,所述柄尾包括第一尾部和第二尾部,所述第一尾部与所述第二尾部成一定夹角。
4、进一步地,所述第一尾部轴线与所述第二尾部轴线成一定夹角。
5、进一步地,所述第一尾部连接在所述柄身末端,所述第一尾部轴线与所述柄身轴线平行或者重合。
6、进一步地,所述柄身包括第一端面,所述第一端面远离所述柄尾,所述第一端面呈倾斜状。
7、进一步地,所述柄身外表面设置有凹槽。
8、进一步地,所述手柄还包括追踪器,所述追踪器连接在所述第一端面上。
9、有益效果:通过将用于焊接机器人示教的手柄的柄尾设置为弯曲状,让其与焊枪末端部分的形状大致匹配,这样就可以将手柄柄尾的姿态与焊枪的姿态较为完整地相对应起来,从而操作人员可以通过观察柄尾的姿态去更为直观且较为准确地预判出焊枪的姿态,如此则便于操作人员判断当前的示教姿态是否正确,也便于其及时将错误的示教姿态调整为正确的姿态,从而便于示教工作的完成。
技术特征:
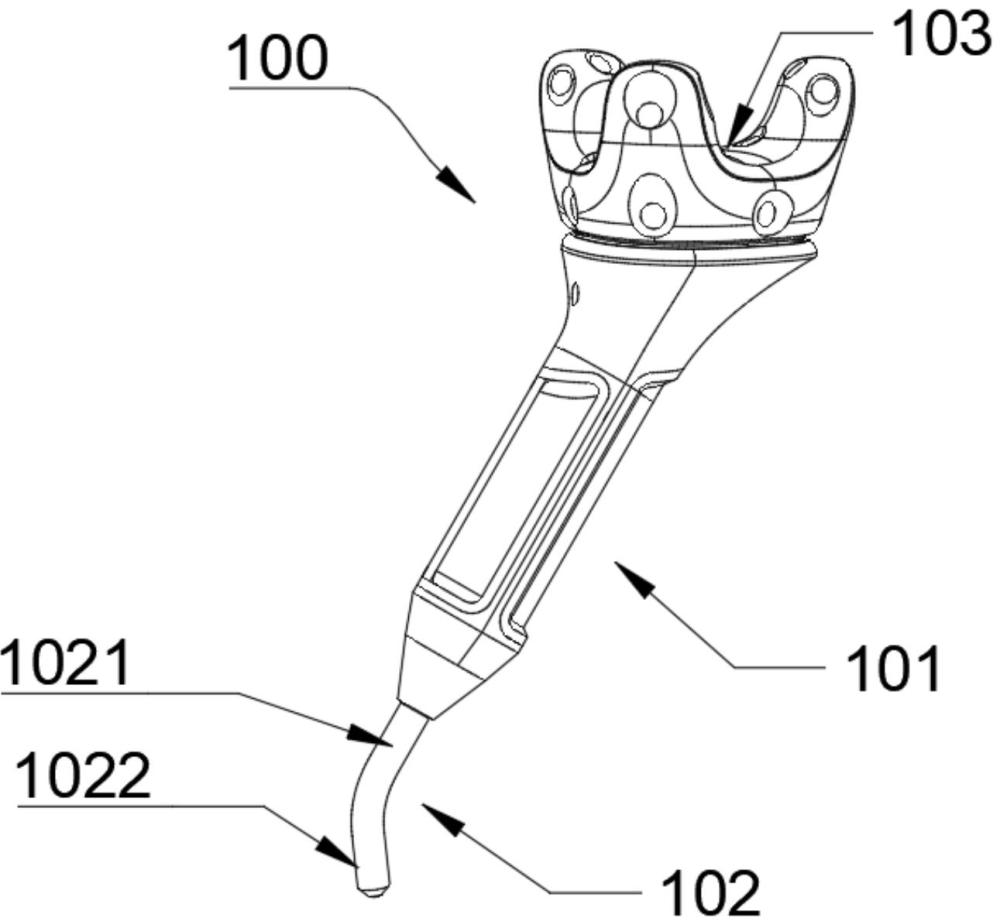
1.一种用于焊接机器人示教的手柄,其特征在于,所述手柄(100)包括柄身(101)和柄尾(102),所述柄尾(102)呈弯曲状,所述柄身(101)用于操作人员握持,所述柄尾(102)用于操作人员在示教时接触或者靠近待焊接工件(300)上的焊缝(w)。
2.根据权利要求1所述的一种用于焊接机器人示教的手柄,其特征在于,所述柄尾(102)包括第一尾部(1021)和第二尾部(1022),所述第一尾部(1021)与所述第二尾部(1022)成一定夹角。
3.根据权利要求2所述的一种用于焊接机器人示教的手柄,其特征在于,所述第一尾部(1021)轴线与所述第二尾部(1022)轴线成一定夹角(θ)。
4.根据权利要求2所述的一种用于焊接机器人示教的手柄,其特征在于,所述第一尾部(1021)连接在所述柄身(101)末端,所述第一尾部(1021)轴线与所述柄身(101)轴线平行或者重合。
5.根据权利要求1所述的一种用于焊接机器人示教的手柄,其特征在于,所述柄身(101)包括第一端面(1014),所述第一端面(1014)远离所述柄尾(102),所述第一端面(1014)呈倾斜状。
6.根据权利要求1所述的一种用于焊接机器人示教的手柄,其特征在于,所述柄身(101)外表面设置有凹槽。
7.根据权利要求5所述的一种用于焊接机器人示教的手柄,其特征在于,所述手柄(100)还包括追踪器(103),所述追踪器(103)连接在所述第一端面(1014)上。
技术总结
本申请涉及机器人示教技术领域,具体公开了一种用于焊接机器人示教的手柄,该手柄包括柄身和柄尾,柄尾呈弯曲状,柄身用于操作人员握持,柄尾用于操作人员在示教时接触或者靠近待焊接工件上的焊缝。如此,通过将手柄的柄尾设置为弯曲状,让其与焊枪末端部分的形状大致匹配,这样就可以将手柄柄尾的姿态与焊枪的姿态完整地相对应起来,从而操作人员可以通过观察柄尾的姿态去更为直观且较为准确地预判出焊枪的姿态,如此则便于操作人员判断当前的示教姿态是否正确,也便于其及时将错误的示教姿态调整为正确的姿态,从而便于示教工作的完成。
技术研发人员:张圣恩
受保护的技术使用者:佛山墨家科技有限公司
技术研发日:20240229
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!